Изобретение относится к контактной сварке и предназначено для определения динамических свойств механизмов сжатия контактных сварочньп машин.
Известны устройства для измерения скорости объекта на заданном участке его перемещения, с помощью .которых можно определи динамическую характеристику механизма сжатия Эти устройства состоят из двух или более электрических датчиков, разнесенных на некоторое расстояние, и перемещающегося объекта, скорость которого необходимо определить. Эти устройства работают по принципу измерения времени транспортного запаздывания между сигналами этих дчиков О.
Однако чтобы использовать известные устройства, для измерения динамики механизма сжатия, сварочная машина должна быть специально оборудована для этих целей. Кроме того, для получения объективной и точной информации о динамических свойствах механизма сжатия перемещение, измеряемое устройством, должно быть значительно больше, чем величина сварочной осадки.
Наиболее близким к изобретению по технической сущности и достигаемому эффекту является устройство для определения динамических свойств механизмов сжатия контактных сварочных машин, содержащее датчик перемещения, пусковое устройство и измеритель времени С2 Ji
Недостатком такого устройства является то, что на точность ерабатывания электрического контакта могут оказывать влияние чистота поверхности контакта, его инерционность, образование микродугового разряда. Кроме того, информация, получаемая этим устройством, не является наглядной.
Цель изобретения - повьппение точности измерений.
Указанная цель достигается за счет того, что в устройстве для определения динамических свойств механизмов сжатия контактных сварочных машин, содержащем датчик перемещения, пусковое устройство и измеритель времени, пусковое устройство выполнено в виде корпуса и закрепленных на нем параллельно друг другу токопр
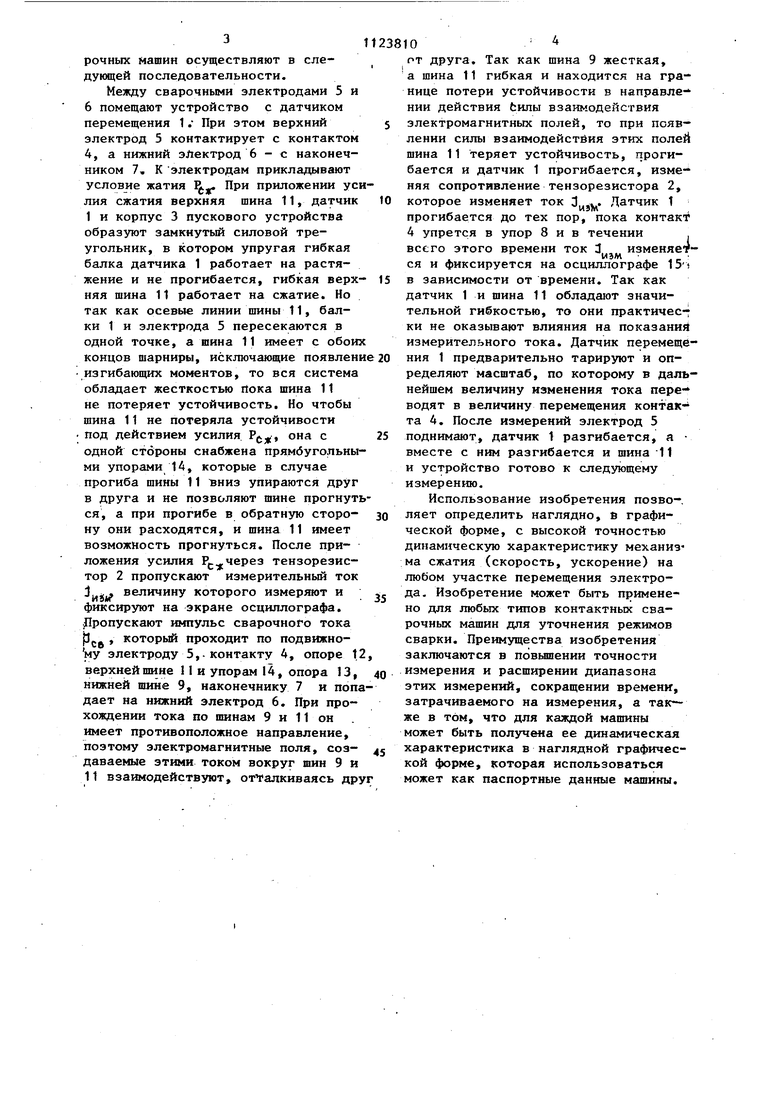
водящих шин, датчик перемещения выпнен в виде упругой консольной балки с тензорезистором, один конец которой закреплен на корпусе пусковог устройства, а другой снабжен контактом, одни концы токопроводящих шин электрически связаны между собой, а другие - соответственно с корпусо и с контактом датчика перемещения, при этом шина, связанная с контактом, закреплена шарнирно и снабжена упорами, установленными вплотную друг к другу по всей длине со стороны, противоположной второй шине. На фиг. 1 изображена схема устройства; на фиг. 2 - положение токопроводящих шин пускового устройства перед началом запуска; на фиг. 3 то же, во время запуска в процессе прохождения импульса сварочного ток на фиг. 4 - сечение А-А на фиг. 3 (с изображением электромагнитных полей от сварочного тока).
Устройство состоит из датчика 1, с тензорезистором 2, выполненным в виде упругой балки, одним концом закрепленной на корпусе 3 пускового устройства, а на другом конце балки жестко закреплен контакт 4, взаимо действующий с подвижным электродом 15 сварочной машины. Для установки устройства на нижний электрод 6 сварочной машины оно снабжено наконечником 7, жестко соединенным с корпусом 3 пускового устройства, пр этом в верхней части наконечника 7 имеется вьщвижной упор 8,; с помощью которого можно задавать величину перемещения h электрода 5, соответсвующую величине осадки. Внутри корпуса 3 расположена нижняя шина 9, один конец которой взаимодействует с наконечником 7, а второй изолирован от корпуса и заканчивается шарниром 10. Верхняя шина 11 заканчивается шарнирными опорами 12 и 13, которые упираются в шарнир 10 ,и контакт 4. С верхней стороны шины 11 закреплены упоры 14., которые не позволяют шине 11 прогнуться в направлении: шины 9 и не препятствуют прогибу в противоположном направлении. Для фиксации иэменений измерительного тока устройства снабжено осциллографом 15.
Определение динамических свойств механизмов сжатия контактных сварочных машин осуществляют в следующей последовательности. Между сварочными электродами 5 и 6 помещают устройство с датчиком перемещения 1 . При этом верхний электрод 5 контактирует с контактом 4, а нижний электрод 6 - с наконечником 7, К электродам прикладывают условие жатия ff. При приложении ус лия сжатия верхняя шина 11, датчик Iи корпус 3 пускового устройства образуют замкнутый силовой треугольник, в котором упругая гибкая балка датчика 1 работает на растяжение и не прогибается, гибкая верх няя шина 11 работает на сжатие. Но так как осевые линии Шины 11, балки 1 и электрода 5 пересекаются в одной точке, а шина 11 имеет с обои концов шарниры, исключающие появлен изгибающих моментов, то вся система обладает жесткостью йока шина 11 не потеряет устойчивость. Но чтобы шина 11 не потеряла устойчивости под действием усилия она с одной стороны снабжена прямбугольны ми упорами 1 А, которые в случае прогиба шины 11 вниз упираются друг в друга и не позволяют шине прогнут ся, а при прогибе в обратную сторону они расходятся, и шина 11 имеет возможность прогнуться. После приложения усилия Pg через тензорезистор 2 пропускают измерительный ток j . . величину которого измеряют и фиксируют на экране осциллографа, пропускают импульс сварочного тока Pgg , который проходит по подвижному электроду 5,-контакту 4, опоре 1 верхней шине I и упорам 14, опора 13, нижней шине 9, наконечнику 7 и поп дает на нижний электрод 6. При прохождении тока по шинам 9 и 11 он имеет противоположное направление, поэтому электромагнитные поля, соз- даваемые этими током вокруг шин 9 и IIвзаимодействуют, отгалкиваясь др 10 от друга. Так как шина 9 жесткая, а шина 11 гибкая и находится на границе потери устойчивости в направле НИИ действия Ьилы взаимодействия электромагнитных полей, то при появлении силы взаимодействия этих полей шина 11 теряет устойчивость, прогибается и датчик 1 прогибается, изме- няя сопротивление тензорезистора 2, которое изменяет ток 3,jt. Датчик 1 прогибается до тех пор, пока контакт 4 упрется в упор 8 и в течении всего этого времени ток 3 изменяется и фиксируется на осциллографе 15 в зависимости от времени. Так как датчик 1 и шина 11 обладают значительной гибкостью, то они практичес-ки не оказывают влияния на показания измерительного тока. Датчик перемещения 1 предварительно тарируют и определяют масштаб, по которому в дальнейшем величину изменения тока пере- водят в величину перемещения контакта 4. После измерений электрод 5 поднимают, датчик 1 разгибается, а вместе с ним разгибается и шина 11 и устройство готово к следующему измерению. Использование изобретения позво-, ляет определить наглядно, S графической форме, с высокой точностью динамическзто характеристику механизма сжатия (скорость, ускорение) на любом участке перемещения электрода. Изобретение может быть применено для любых типов контактных сварочных машин для уточнения режимов сварки. Преимущества изобретения заключаются в повышении точности измерения и расширении диапазона этих измерений, сокращении времени, затрачиваемого на измерения, а также в том, что для каждой мапшны может быть получена ее динамическая характеристика в наглядной графической форме, которая использоваться может как паспортные данные машины.
11 ;
,// ,
I /I I I
М4 му|ввм1ммч|мумцмв« пр в н
fPut.2
1f
cS
Фи..3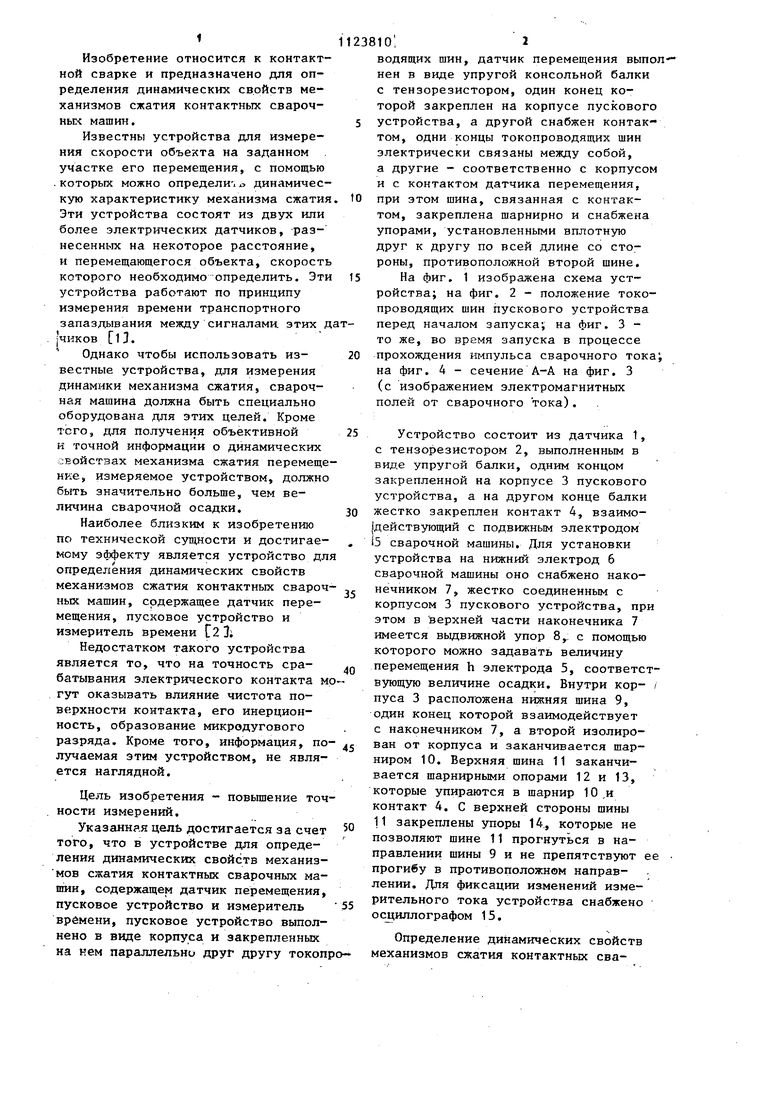
| название | год | авторы | номер документа |
|---|---|---|---|
| МАШИНА ДЛЯ КОНТАКТНОЙ ТОЧЕЧНОЙ СВАРКИ АРМАТУРНЫХ СЕТОК | 1971 |
|
SU300986A1 |
| Устройство для определения динамических свойств механизмов сжатия контактных сварочных машин | 1982 |
|
SU1058737A1 |
| Машина для контактной точечной сварки | 1989 |
|
SU1738546A1 |
| МЕХАНИЗМ СЖАТИЯ КОНТАКТНЫХ СВАРОЧНЫХ МАШИН | 1971 |
|
SU289881A1 |
| АВТОНОМНЫЙ ДАТЧИК ДАВЛЕНИЯ | 2022 |
|
RU2788310C1 |
| Ручной инструмент для односторонней контактной микросварки | 1987 |
|
SU1511040A1 |
| Способ и устройство защиты от коррозионного растрескивания сварной металлоконструкции | 2015 |
|
RU2626705C2 |
| Машина для контактной сварки арматурных каркасов | 1987 |
|
SU1590275A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КАЧЕСТВА СВАРНОГО СОЕДИНЕНИЯ В ПРОЦЕССЕ СВАРКИ | 1973 |
|
SU398371A1 |
| МЕХАНИЗМ СЖАТИЯ KOHTAKTHblX СВАРОЧНЫХМАШИН | 1971 |
|
SU305029A1 |
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СВОЙСТВ МЕХАНИЗМОВ СЖАТИЯ КОНТАКТНЫХ СВАРОЧНЫХ МАШИН, содержащее датчик перемещения, пусковое устройство и измеритель вре5CJFror/,r. мени, отличающееся тем, что, с целью повьппения точности измерения, пусковое устройство выполнено в виде корпуса и закрепяенных на нем параллельно друг другу токопроводящих шин, датчик перемещения выполнен в виде упругой кон- . сольной балки с тензорезистором, один конец которой закреплен на корпусе пускового устройства, а другой снабжен контактом, одни концы токопроводящих шин электрически связаны между собой, а другие - соответственно с корпусом и контактом датчика перемещения, при этом шина, связанная с контактом закреплена шарнирно и снабжена упорами, установленными (Л вплотную друг к другу по всей-длине со стороны, противоположной второй с шине.i
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для измерения параметров линейного движения объекта | 1974 |
|
SU540214A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для определения динамических свойств механизмов сжатия контактных сварочных машин | 1982 |
|
SU1058737A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
