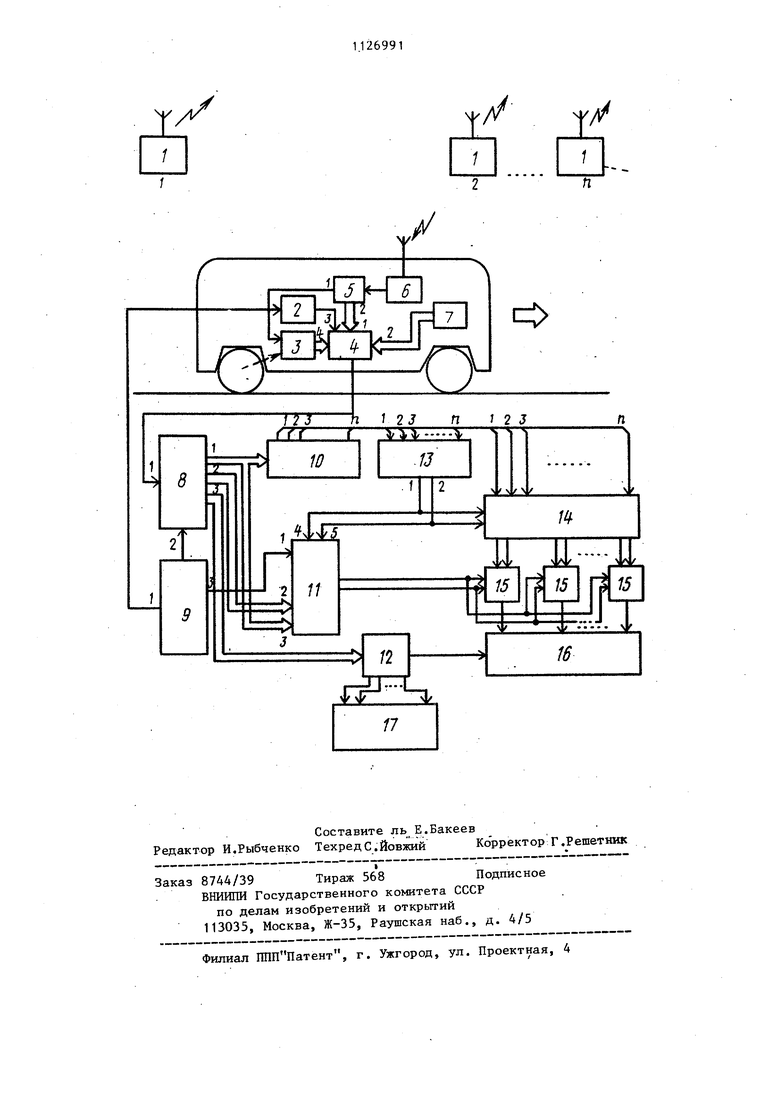
1 Изобретение относится к контролю движения транспортных средств и может быть использовано, в частности, в системах централизованного контроля подвижных единиц маршрутизированного транспорта. Известно устройство для контроля движения транспортных средств (ТС), которое содержит датчики, регистры сдвига, электронные часы, блок установки времени сдвига и блок отобр жения (индикатор) р . . Известное устройство обеспечивает возможность регулирования движения транспорта непосредственно на линии и оперативного устранения сбоев в графике движения, однако не позволяет определять местоположение ТС на маршруте с заданной достоверностью, т.е. реальная оценка оперативной ситуации на маршруте фактически исключается. Сбои, возникающие на маршруте, обнаруживаются лишь спустя какое-то время, определяемое длительностью цикла и временем, прошедшим от момента прохождения маршрутного датчика до момента возникновения сбоя (чем меньше последнее, тем больше ошибка и тем тяжелее исправить сбой, прошедший на маршруте). Кроме того, в известном устройстве датчики установлены на пути следования ТС, а точность определения местоположения ТС и интервалов движе ния зависит от числа установленных на пути следования маршрутных датчиков, вследствие чего известное устро ство позволяет получать наглядную ин формацию о местонахождении ТС на мар шруте и об интервалах движения в реaj bHOM масштабе времени только при наличии большого числа маршрутных датчиков. Известно также устройство для кон .роля движения ТС, содержащее маршрут вые датчики, регистры сдвига, блок индикации, блок формирования сигнало количества пройденных отрезков пути дешифратор направления движения, бло ;формирования импульсов сдвига и блок управления записью информации С2. Наиболее близким по технической сущности к предлагаемому является устройство для контроля движения ТС, содержащее маршрутные датчики, на транспортном средстве - приемник сиг налов, соединенный с входом формирователя кода датчика, первый выход 9 которого соединен с датчиком пройденного пути, на пункте контроля блок приема и разделения сигналов, первый выход которого соединен с первым входом формирователя импульсов сдвига, дешифратор направления движения, выходы -которого подключены к первым входам коммутатора и к вторым входам формирователя импульсов сдвига, выходы которого соединены с первыми входами регистров, к вторым входам которых подключены выходы коммутатора, выходы регистров соединены с соответствуюшлми первыми входами первого блока индикации 3. Недостатком известного устройства является отсутствие возможности непрерывно передавать информацию на пункт контроля без отвлечения водителя от основных обязанностей и, как следствие, .низкая функциональная надежность устройства. Цель изобретения - повьш ение функциональной надежности устройства. Поставленная цель достигается тем, что в устройство для контроля движения транспортных средств, содержащее маршрутные датчики, на транспортном средстве - приемник сигналов, с оединенный с входом формирователя кода датчика, первый выход которого соединен с датчиком пройденного пути, на пункте контроля - блок приема и разделения сигналов, первый выход которого соединен с первым входомформирователя импульсов сдвига, дешифратор направления движения, выходы которого подключены к первым входам коммутатора и к вторым входам формирователя импульсов сдвига, выходы которого соединены с первыми входами регистров, к вторым входам которых подключены выходы коммутатора, выходы регистров соединены с соответствуюшлми первыми входами первого блока индикации, на транспортном средстве введены формирователь сигнала запуска, блок ввода сигналов и блок кодирования, выход формирователя кода датчика подключен к первому входу блока кодирования, выход блока ввода сигналов соединен с вторьш входом блока кодирования, выход формирователя сигнала запуска подключен к третьему входу блока кодирования, четвертый вход которого соединен с выходом датчика пройденного пути, выход блока кодирова шя и вход фор д рователя сигнала запуска через рад1о канал соединены с пунктом контроля, на пункте контроля введены дешифратор кода маршрутных датчиков, деитфратор команд, второй блок индикации и блок согласования, первый выход блока приема и разделения сигналов подключен к входу дешифратора кода маршрутных -датчиков, второй выход блока приема и разделения сигналов соединен с вторым входом фор.мирователя импульсов сдвига, первьп выход блока согласования и первый вход блока приема и разделения сигналов соединены с радиоканалом, вто рой выход блока согласования соединен с вторым входом блока приема и разделения сигналов, третий выход блока согласования соединен с третьим входом формирователя импульсов сдвига, третий выход блока приема и разделения сигналов подключен к входу дешифратора команд, первый вы ход которого соединен с вторым вход первого блока индикации, вторые вых ды дешифратора команд подключены к входам второго блока индикации. На чертеже приведена схема предл гаемого устройства. Устройство для контроля движения .ТС содержит маршрутные датчики 1, формирователь 2 сигналов запуска, датчик 3 пройденного пути, блок А к дирования, формирователь 5 кода дат чика, приемник 6 сигналов, блок 7 ввода сигналов, блок 8 приема и раз деления сигналов, блок 9 согласования, дешифратор 10 кода маршрутных датчиков, формирователь 11 импульсов сдвига, дешифратор 12 команд, дешифратор 13 направления движения, коммутатор 14, регистры 15 сдвига, первый блок 16 индикации и второй блок 17 индикации. Устройство работает следующим об разом. Маршрутные датчики 1 излучают g ближней зоне частотно-модулированные сигналы, представляющие собой к бинацию независимых частот. При нахождении ТС в зоне действия маршрутного датчика приемник 6 сигналов принимает, демодулирует и усиливает -эти сигналы, в результате чего на выходньк шинах приемника возникает кодовая комбинация сигнапов постоян ного тока, соответствующая номеру маршрутного датчика. Эти сигналы по ступают в формирователь 5 кода датчика, на первом выходе которого формируется импульс сброса в нуль датчика сигналов пройденного пути, а на втором - код маршрутного датчика, который хранится в регистре формирователя 5 кода датчика до момента проследования ТС следующего маршрутного датчика. Таким образом, в датчике 3 пройденного пути процесс формироваПИЯ сигналов количества пройденных отрезков пути начинается каждый раз с момента проследования очередного маршрутного датчика. Указанные вьш1е данные о маршрутном датчике, расстоянии, пройденном от этого датчика, а также данные о команде, передаваемой водителем на пункт контроля, поступают на информационные вхолы блока 4 л олирования. Блок 9 согласования синхронизирует работу всего устройства, разделяя во времени процессы приема и передачи и осуществляя процесс управления обработкой информации. После приема на выходах блока 8 приема и разделения сигналов появляются код маршрутного датчика, код количества пройденных от данного марифутного датчика фиксированных отрезков пути и код команды. Код пройденного ТС маршрутного датчика поступает в дешифратор 10 кода маршрутных датчиков, на одном из выходов которого в зависимое- ти от кода номера датчика появляется высокий потенциал. При движении ТС проходит последовательно ряд маршрутных датчиков. Например, при движении по маршруту вправо ТС проходит последовательно первый, второй, ..., п-и маршрутные датчики, при движении в обратном направлении (влево) ТС - п -и, (п-1)-й,..., второй, первый маршрутные датчики. Соответственно в первом случае на выходе дешифратора 10 кода маршрутных датчиков сигнал появляется последовательно на первом, втором, ..., ()-м п-м выходах, во втором случае - на h-M, (п-1)-м,..., Втором, первом выходах. Эта информация поступает на входы дешифратора 13 направления движения и коммутатора 14 управления записью информации. При движении ТС п6 маршруту вправо импульсы сдвига поступают на прямые управляющие входы регистров 15 сдвига, благодаря чему происходит сдвиг
информации в регистрах вправо. Соответственно этому в блоке 16 индикации загораются лампы, имитирующие движение ТС вправо. При движении ТС по маршруту влево дешифратор 13 направле ния движения формирует на втором своем выходе сигнал Движение влево. Под действием сигнала Движение влево формирователь 11 импульсов сдвига формирует импульсы сдвига влево, которые подаются на реверсивные Управляющие входы регистров15 сдвига. Происходит сдвиг информации и соответственно этому имитация блоко,м 16 инеикации движения ТС влево. Поскольу отсчет расстояния, пройденного ТС ,на маршруте, начинается от каждого маршрутного датчика,в формирователь 11. импульсов сдвига поступают коды пройденных ТС маршрутных датчиков с первого выхода блока 8 приема и разделения данных. При совпадении кода маршрутного датчика, принятого блоком 8 приема и Тразделения данных, с ранее принятым аналогичным кодом на выходе блока сигнал отсутствует. При изменении кода маршрутного датчика по сравнению с предшествующим (что имеет место при проходе ТС очередного маршрутного датчика) формирователь 11 импульсов сдвига подготавливается к отображению движения ТС на новом участке ,
Таким образом, местоположение ТС с заданной степенью точности, определяемой длиной единичного отрезка пути, отображается на каждом участке маршрута. При передаче с ТС одной из Фанее запрограммированных команд последняя Г)тображается следующим образом. С третьего выхода блока 8 приема и разделения данных код команды поступает в дешифратор 12 команд, в результате .чего на одном из информационных выходов последнего появляется напряжение, под действием которого загорается соответствующая индикаторная лампа блока 17 индикации. Осуществляется автоматическое оперативное отображение информации о местоположен ии, интервале движения ТС, xapaiKTSpe и местоположении возникающих сбоев движения.
Благодаря оперативному отображению информации о местоположении ТС, интервале их движения, характере и местонахождении возниканидих сбоев движения существенно снижается время с момента возникновения последних до момента принятия решений диспетчером. Зная характер сбоя, диспетчер имеет возможность оперативно принять наиболее оптимальное решенЬе для его ликвидации. Таким образом, повьшается функциональная надежность устройства.
Y//уУ
п
X
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля движения транспортных средств | 1986 |
|
SU1397957A2 |
| Устройство для контроля движения транспортных средств | 1986 |
|
SU1345227A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2431200C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2160929C1 |
| Устройство для контроля движения транспортных средств | 1987 |
|
SU1538178A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1994 |
|
RU2094853C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1992 |
|
RU2054198C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ | 1995 |
|
RU2096833C1 |
| Устройство для контроля движения транспортных средств | 1983 |
|
SU1129644A1 |
| СИСТЕМА ДИСПЕТЧЕРСКОГО УПРАВЛЕНИЯ НАЗЕМНЫМ ТРАНСПОРТОМ | 1995 |
|
RU2113014C1 |
УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДВИЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ, содоржащее маршрутные датчики, на транспортном средстве - приемник сигналов, соединенный с входом формирователя кода датчика, первый выход-которого соединен с датчиком пройденного пути, на пункте контроля - блок приема и разделения сигналов, первый выход которого соединен с первым входом формирователя импульсов сдвига, девшфратор направления движения, выходы которого подклниены к первым, входам Коммутатора и к вторым входам формирователя импульсов сдвига, выходы которого соединены с первыми входами регистров, к вторым входам которых подключены выходы коммутатора, выходы регистров соединены с соответствующими первыми входами первого блока индикации, отличающ е е -с я тем, что, с целью повышения надежности функционирования устройства, на транспортном средстве введены формирователь сигнала запуска, блок ввода сигналов и блок кодирования, выход формирователя кода датчика подключен к первому входу блока кодирования, выход блока ввода сигналов соединен с вторым входом блока кодирования, выход формирователя сигнала запуска подключен к третьему входу блока кодирования, чет.вертый вход которого соединен с выходом датчика пройденного пути, выход блока кодирования и вход формирователя сигнала запуска через радиоканал соединены с пунктом контроля, на пункте контроля введены дешифратор кода маршрутных датчиков, деши(Л фратор команд, второй блок индикас ции и блок согласования, первый выход блока приема и разделения сигналов подключен к входу дешифрато- ра кода маршрутных датчиков, второй выход блока приема и разделения сигналов соединен с вторым входом форми 9 рователя импульсов сдвига, первый Од выход блока согласования и первый вход блока приема и разделения сигСО СО налов соединены с радиоканалом, второй выход блока согласования соединен с вторым входом блока приема и разделения сигналов, третий выход блока согласования соединен с третьим входом формирователя импульсов сдвига, третий выход блока приема и разделения сигналов подключай к входу дешифратора команд, первый вы.ход которого соединен с вторым входом первого блока индикации, вторые выходы дешифратора команд подключены к входам второго блока индикации.
NpNJ/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для контроля движения транспортных средств | 1975 |
|
SU533955A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Промьшшенный транспорт, 1973, № 7, с | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
