Изобретение относится машиностроению, а именно к устройствам автоматической ориентации и загрузки роторных машин штучными деталями.
Целью изобретения является повышение производительности роторного автомата питания.
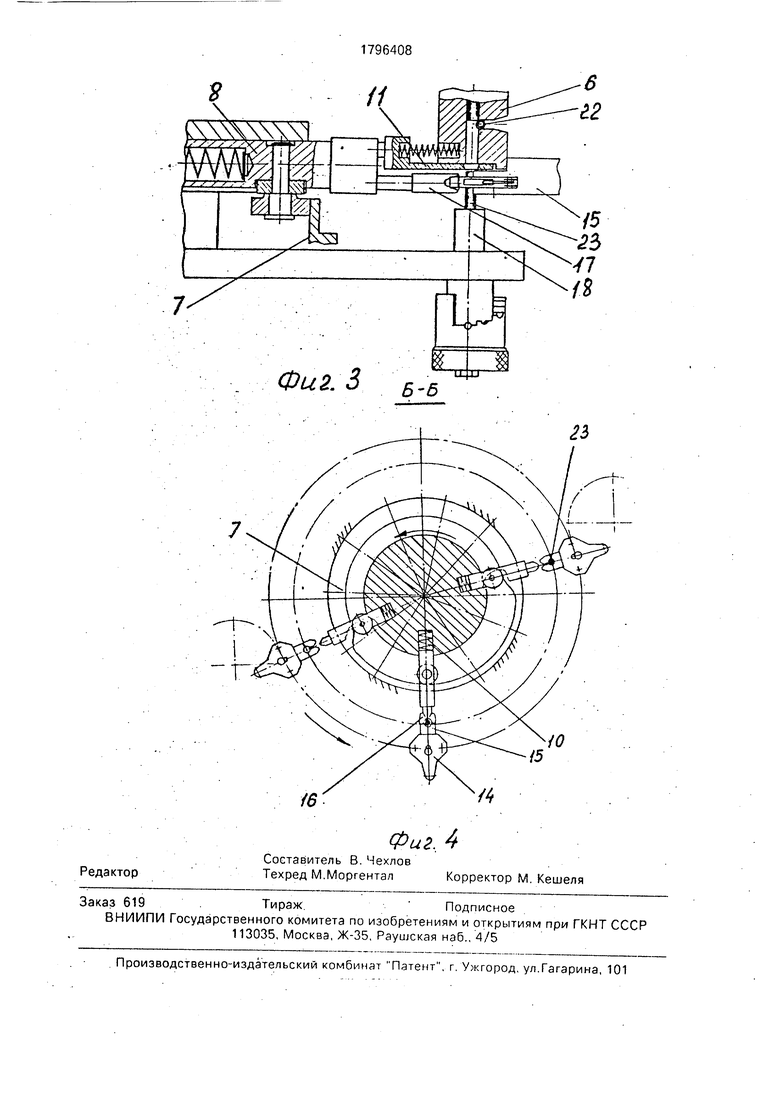
На фиг.1 схематично изображен роторный автомат питания, продольный разрез; на фиг.2 - узел I на фиг.1, перед загрузкой изделия в клещевой захват; на фиг.З - то же, в зоне загрузки изделий; на фиг.4 - разрез А-А на фиг.1.
Роторный автомат питания (фиг.1) содержит основание 1, бункер 2 с ворошителями 3 и приводной вал 4. На валу 4 закреплен диск 5 с трубками-накопителями 6, равномерно расположенными по периферии бункера 2 и установленными под трубками-накопителями с возможностью радиального перемещения от кулачка 7, закрепленного на основании 1, ползунами 8. Ползуны 8 расположены в радиальных на- поавляющих 9, выполненных в диске 5, и подпружинены относительно него пружинами 1U, при этом на ползунах могут быть
установлены пластины 1.1 со сквозными отверстиями 12, а на валу 4 может быть закреплена звездочка 13,- расположенная под диском 5 и огибаемая транспортным конвейером 14с клещевыми захватами 15. Кроме этого автомат содержит механизмы раскрытия губок 16 клещевых захватов 15, каждый из которых жестко соединен с соответствующим ползуном 8 и выполнен в виде клина 17, размещенного с возможностью взаимодействия с соответствующими губками клещевого захвата 15, расположенного в зоне загрузки под соответствующей трубкой- накопителем Ь.
На диске 5 могут быть установлены ре- гулируем.ые упоры 18, расположенные соос- но трубкам-накопителям 6. При этом пластины 11 размещены между клиньями 17 и трубками-накопителями 6, а упоры 18 под клиньями 17.
Ворошители 3 могут быть выполнены в виде захватных трубок, установленных с возможностью вращения на диске 5 и жестко соединенных с шестернями 19, зацепляющихся с центральным зубчатым колесом 20, на днище 21 бункера 2.
XI О
О
00
Трубки-накопители 6 оснащены отсека- телями 22 (фиг,2 и 3) деталей 23.
Роторный автомат питания работает следующим образом.. :
В процессе совместного непрерывного вращения вала 4, звездочки 13 и кинематически связанных с ними через шестерни 19 и колесо 20 ворошителей 3, происходит непрерывное движение зацепляющегося со Звездочкой конвейера 14 и обеспечивается захват ворошителями расположенных в бункере 2 деталей 23. Захваченные ворошителями 3 детали поступают в трубки-накопители 6, образуя в них однозначно соориентированный вдоль оси столб, нижняя деталь которого удерживается отсекате- лем 22. Соориентированный таким образом столб деталей 23 переносится в зону огибания звездочки 13 конвейером 14. Одновременно с переносом закрепленных на диске 5 с указанных трубок 6 в зону огибания звездочки конвейером происходит перемещение в эту же зону и соответствующих им ползунов 8,
При заходе конвейера 14 в зону огибания звездочки 13, закреплённые на нем захваты 15 располагаются под соответствующими трубками-накопителями 6, а ползуны 8 под действием кулачка 7, совершают перемещение в радиальных направляющих 9. В процессе перемещения ползунов 8, закрепленные на них клинья 17 воздействуют на губки 16 захватов 15, и обеспечивают их принудительный расжим, а соединенные с ползунами пластины 11 располагаются своими отверстиями 12 под соответствующими трубками-накопителями 6 (фиг.2). Затем происходит срабатывание отсекателя 22 и отделение нижней детали 23 стрлба. Освобожденная от воздействия отсекателя деталь под собственным весом выпадает из трубки 6 и устанавливается между раскрытыми губками захвата 15 опираясь
при этом на упор 18 (фиг.З). После этого ползун 8 под действием кулачка 7 возвращается в исходное положение, при котором клин 17 выходит за пределы губок 16 захвата 15, а отверстие 12 пластины 11 смещается относительно трубки-накопителя 6. При установке ползуна 8 в исходном положении, освобожденные губки 16 захвата зажимают деталь 23, а пластина 11, перекрывает отверстие трубки-накопителя 6.
Далее конвейер 14 выносит загруженные в клещевые захваты 15 детали 23 из зоны загрузки.
Таким образом в роторном автомате питания достигается перемещение загружаемых деталей по, кратчайшему прямолинейному пути. В результате этого происходит снижение до минимума затрат времени на перемещение загружаемой детали и повышается производительность работы заявленного автомата.
Формула изобретения Роторный автомат питания, предназначенный для подачи деталей в клещевые захваты, содержащий основание, бункер с ворошителями, приводной вал, закрепленные на нем диск с трубками-накопителями, равномерно расположенными по периферии бункера, и установленные под трубками-накопителями с возможностью радиального перемещения от кулачка, закрепленного на основании, подпружиненные ползуны со сквозными отверстиями, отличающийся тем,, что, с целью
повышения производительности, автомат снабжен механизмами раскрытия губок клещевых захватов, каждый из которых жестко связан с соответствующим ползуном и выполнен в виде клина, размещенного с возможностью взаимодействияс соответствующими губками клещевого захвата, расположенного в зоне загрузки под соответствующей трубкой-накопителем.
Редактор
Фиг.. 4
Составитель В. Чехлов. Техред М.Моргентал Корректор М. Кешеля
| название | год | авторы | номер документа |
|---|---|---|---|
| Роторно-конвейерная машина | 1985 |
|
SU1286428A1 |
| Роторно-конвейерная машина | 1982 |
|
SU1118516A1 |
| Ротор загрузки роторно-конвейерных машин | 1983 |
|
SU1199405A1 |
| Роторный автомат питания | 1987 |
|
SU1524988A1 |
| Загрузочный ротор | 1989 |
|
SU1646783A1 |
| Ротор ориентации штучных изделий | 1978 |
|
SU841904A1 |
| Транспортный ротор для перемещенияшТучНыХ издЕлий | 1979 |
|
SU841907A1 |
| Роторно-конвейерная машина | 1980 |
|
SU948618A1 |
| Роторный автомат питания | 1987 |
|
SU1491654A1 |
| Роторно-конвейерная машина | 1977 |
|
SU686808A1 |

Использование: в машиностроении, а именно в устройствах автоматической ориентации и загрузки роторных машин штучными деталями. Сущность изобретения: автомат содержит основание, бункер с ворошителями, приводной вал, закрепленный на нем диск с трубками-накопителями и установленными под трубками-накопителями с возможностью радиального перемещения от кулачка подпружиненными ползунами. Автомат также оснащен механизмами раскрытия губок клещевых захватов, каждый из которых жестко связан с соответствующим ползуном и выполнен в виде клина, размещенного с возможностью взаимодействия с соответствующими губками захватов. 4 ил.
| Роторный автомат питания | 1982 |
|
SU1060403A2 |
