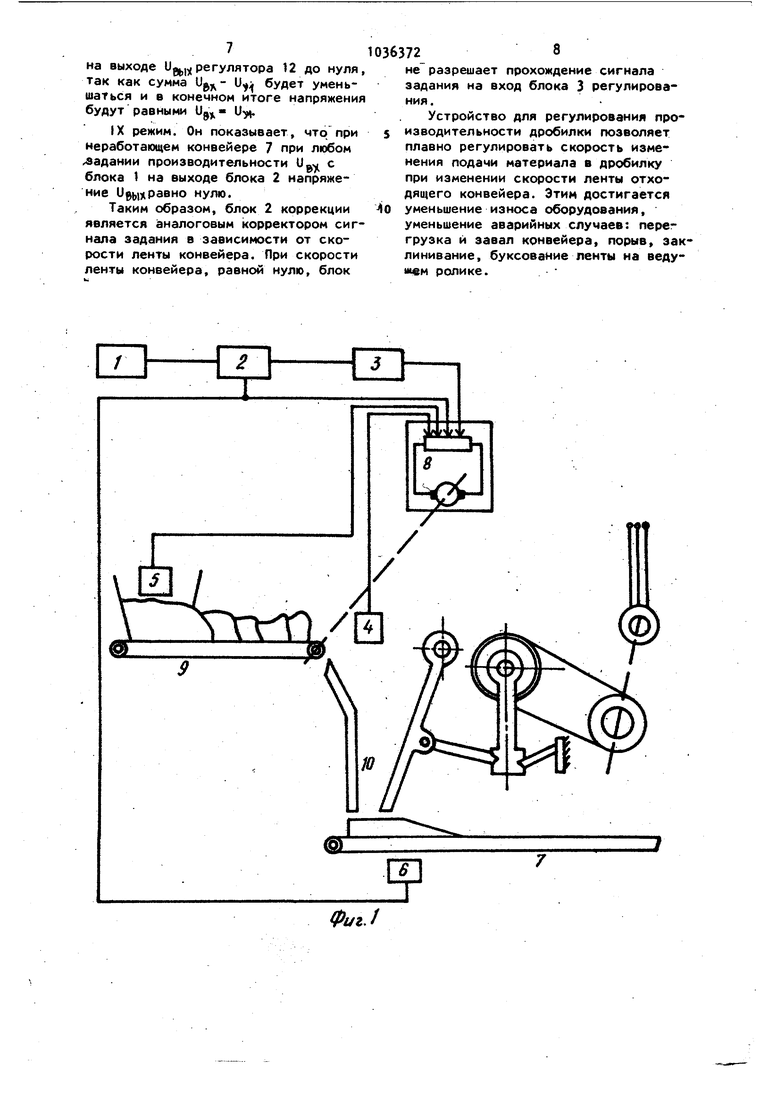
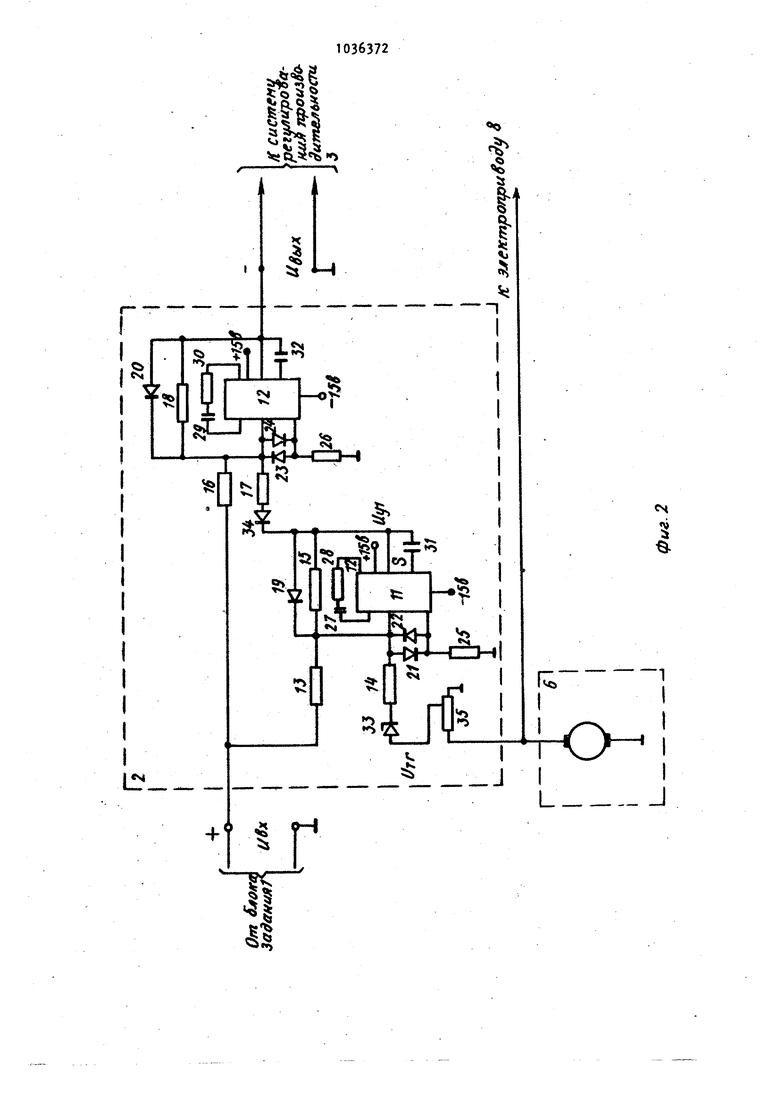
О 00
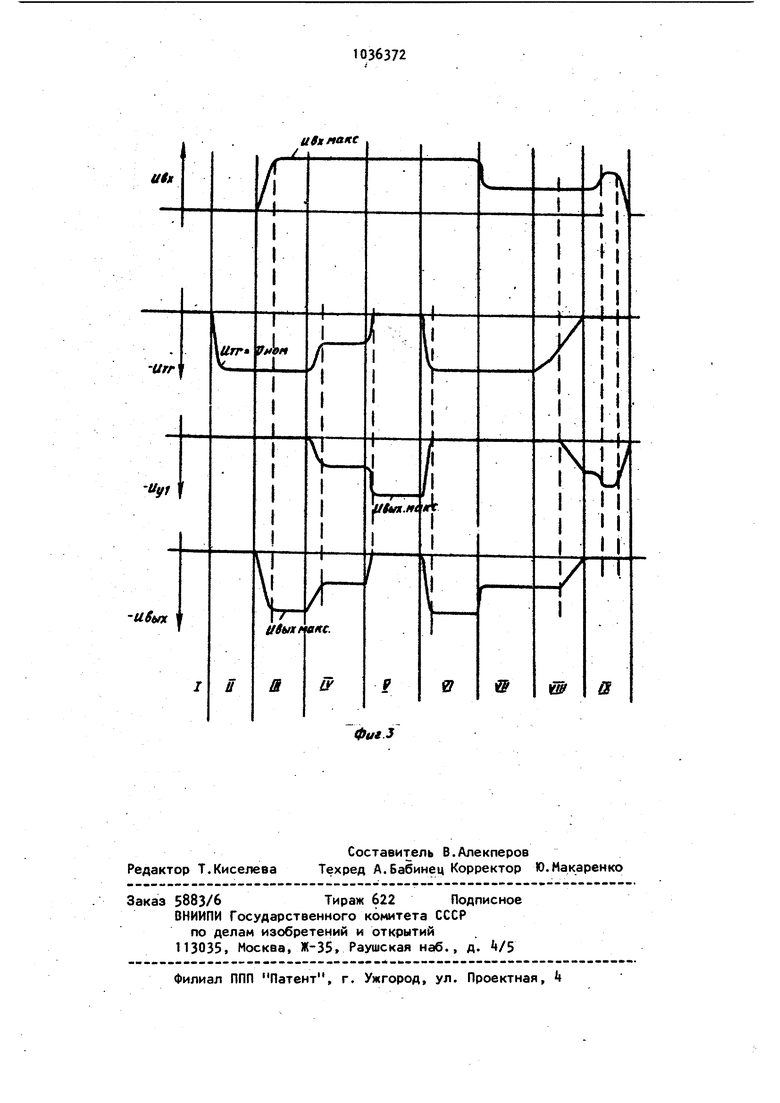
о Изобретение относится к устройс вам для регулирования производител ности дробильных машин и может быт использовано в промышленности стро тельных материалов, в металлурги.че кой, горнорудной, и горноперераба тывающей промышленности. Известно устройство для регулирования производительности дробилки, содержащее блок задания, регуля тор производительности, регулятор нагрузки и привод питателя, входы которого соединены с выходами датчи ка уровня материала в приемном бункере, датчика скорости отходящего конвейера, датчика нагрузки приводного двигателя дробилки, датчика нагрузки отходящего конвейера и с выходом датчика контроля контроля негабарита. Кроме того, содержит до полнительно последовательно соединенные интегратор, блок сравнения и блок контрольного времени, причем вход интегратора соединен с выходом привода питателя, вход регулятора нагрузки - с выходом блока сравнени второй вход которого подключен к вы ду блока контрольного времени ClX В этом устройстве датчик скорост отходящего конвейера работает дискретно и отключает привод питателя дробилки только при полной остановк отходящего конвейера. Наиболее близким по технической сущности к предлагаемому изобретени является устройство для регулирования производительности дробилки, содержащее блок задания производительности, электропривод питателя, соединенный с выходами блока регулирования производительности, датчик негабаритного куска материала, датчика уровня материала в приёмном бункере, датчика скорости ленты отходящего конвейера 2. Работа этого устройства удовлетворяет всем требованиям дробления при изменении физико-механических свойств дробимого материала и крупности кусков. Однако при уменьшении скорости ленты (по любой причине ) возникают аварийные ситуации или близкие к этому режимы работ, которые приводят к большому износу ленты и рабочих органов конвейера, например пробуксовка ленты на ведутем ролике создает большой износ ле ты и опасна в пожарном отношении; перегрузка ленты опасна.резким увеличением просыпеи материала под конвейер, перегрузкой и выходом из . строя электропривода. Уменьшение скорости ленты конвейера может привести / к заклиниванию дробленого материала между выходной щелью дробилки и конвейером 1 подпор дробилки). Целью изобретения является повышение качества регулирования. Поставленная цель достигается тем, что устройство для регулирования производительности дробилки, содержащее блок задания производительности, электропривод питателя, соединенный с выходами блока регулирования производительности, датчика негабаритного куска материала, датчика уровня материала в приемном бункере, датчика скорости ленты отходящего конвейера, снабжено блоком коррекции задания производительности, причем первый вход блока коррекции задания производительности соединен с выходом блока задания производительности, второй вход - с датчиком скорости ленты отходящего конвейера, а выход - с входом блока регулирования производительности. На фиг.1 схематично изображено устройство для регулирования производительности дробилки; на фиг.2 принципиальная схема блока коррекции задания производительности; на иг. 3 - осциллограммы входных и выходных напряжений блока 2. Устройство содержит блок 1 задаия производительности, блок 2 корекции задания производительности, лок 3 регулирования производительости, датчики негабаритного куска атериала k, уровня материала 5 в риемном бункере, датчик 6 скорости енты отходящего конвейера 7, элекропривод 8 питателя 9 дробилки 10. Датчиком 6 скорости ленты отхоящего конвейера 7 может быть любое налоговое устройство, например тахрёнератор. Канал управления от датчиа скорости 6 на электропривод 8 искретный. Он запрещает включение лектропривода 8 отключает электроривод) только при скорости ленты онвейера 7, равной нулю или близой к нулевой. Канал управления от атчика 6 скорости на блок 2 коррекии производительности аналоговый. Блок 3 регулирования производиельности может быть любой-разомкутый или замкнутый с различным набором датчиков и регуляторов режима дробления (датчики и регуляторы не показаны). Устройство работает следующим образом. Если лента конвейера 7 неподвижна (не включен электропривод конвейера, порыв или сход ленты) запуск электропривода 8 питателя 9 не разрешается датчиком 6 скорости через дискретный канал. Аналоговый канал с датчика 6 скорости на блок 2 коррекции производительности запреща ет прохождение сигнала задания с бло ка 1 в блок 3 регулирования производительности. В установившемся режиме работы, когда нет внешних возмущений, т.е. когда скорость ленты конвейера 7 номинальная и не изменяется, дискретный сигнал с датчика скорости разрешает управление электроприводом 8 питателя 5. Аналоговый сигнал с датчика 6 скорости подает на вход блока 2 коррекции производительности разрешение на прохождение сигнала с бло ка 1 задания в блок 3 регулирования производительности без ограничений. Если задана максимальная произвол , дительность дробилки блоком 1 задания и изменилась скорость ленты конвейера 7 в сторону уменьшения по, любой причине, датчик 6 скорости будет выдавать уменьшенный сигнал в блок 2 коррекции производительности, тем самым уменьшая сигнал задания на вхо де блока 3 регулирования пропорционально уменьшению скорости ленты конвейера. Причем коэффициент пропорциональности между скоростью ленты конвейера 7 и сигналом с выхода блока 2 коррекции должек быть таким, чтобы при любой скорости ленты конвейера 7 количество дробленного материала на погонный метр ленты оставалось постоянным и равным номинальной загрузке конвейера. Следовательно, происходит уменьшение производительности дробилки 10. А количество материала на ленте, движущейся с меньшей скоростью, остается прежним. Таким образом, таким регулирова нием производительности дробилки предотвращается излишняя просыпь материала с конвейера, его перегрузка, а возможно и более опасные после ствия - заклинивание ленты, ее порыв или возгорание в результате буксования на ведущем ролике. Если ско1724 рость ленты конвейера 7 увеличится до номинальной. То датчик 6 скорости увеличит свой сигнал, и на выходе блока 2 коррекции увеличится сигнал, сигнал задания блоку 3 регулирования производительности. Если блоком 1 задания задана не Смаксимальная производительность и скорость ленты конвейрра 7 уменьшается с номинальной скорости, корректировка задания производительности блоком 2 будет производиться только с того момента, когда погонная нагрузка материала на ленте конвейера 7 достигнет номинального рабочего значения. Если произошла остановка конвейера при работе дробилки 10 (остановка по сигналу металлоискателя, срабатывания защиты электропривода конвейера и т.д.) , отключается электропривод 8 питателя 9 через дискретный канал управления от датчика 6 скорости. Аналоговый канал от датчика 6 через- блок 2 коррекции также запрещает прох ждение сигнала задания в блок 3 регулирования производительности. Тем самым приводит последнюю в нулевое (исходное)состояние, подготавливая ее к очередному запуску после устранения причин остановки отходящего конвейера 7. Блок 2 коррекции (фиг.2)выполнен на основе микросхем и состоит из двух пропорциональных регуляторов 11 и 12. Одновременно регуляторы выполняют функцию суммирования двух си|- налов: регулятор 11 - напряжение входа напряжение Uffдатчика скоррсти 6; регулятор 12 - напряжение входа напряжение выхода Uu. регулятора 11. Пропорциональный регулятор 11 с двумя входами выполнен с использованием входных резисторов 13 и I с сопротивлениями Rj| и R д; и резистора 15 обратной связи с сопротивлением R. Регулятор 12 также с двумя входами выполнен с использованием входных резисторов 1б и 17 с сопротивлениями Rj и R и резистора 18 обратной связи с сопротивлением R7. Коэффициенты усиления двух регуляторов по всей входам равны 1. Для получения на выходах регуляторов сигналов только одной полярности, резисторы обратных связей регуляторов шунтированы диодами 19 и 20. Для защиты регуляторов по входу применяются диоды 2i-2k, котг рые включаются между выходами ник росхем. Резисторы 25 и 26 с сопротивлениями Rjr- и RA включены для температурной стабилизации регуляторов и выбираются, например, для регулятора 11, так: Ry- Выбор частотного диапазона работы регуляторов осуществляется корректирующими цепочками из конденсатора 27 резистора 28, конденсатора 29 резистора 30 и конденсаторами 31 и 32. Стабилитрон 33 применяется для обеспечения порогового напряжения . Диод 3 предназначен для отсекания напряжения U положительной полярности с выхода регулятора 11, которое может быть не более 0,8 В и появляется при отрицательном напряжении на входе регулятора 11. Потен циометр 35 служит для согласования напряжений между тахогенератором и регулятором 11. Работу блока коррекции 2 можно подразде/Ц1Ть на fX режимов, которые могут возникнуть в процессе эксплуатации. На фиг. 3 показаны осциллограммы: напряжения входа от бло ка 1 задания производительности, на пряжения коррекции и датчика 6 ско рости, выходное нарряжение регулятора 11 и выходное напряжение U gj,, регулятора 12 (блока 2), последнее поступает на вход блока 3 регулирования производительности. Каждый режим работы рассматриваем отдельно, причем исходным состоянием для следующего режима является состо яние сигналов предыдущего режима. 1 режим. Напряжение входа на пряжение коррекции U равны нулю, а поэтому напряжения с выходов регуляторов Uv)| и равны нулю, It режим. Запустили конвейер до номинальной скорости VJ,QJ. Напряжение отрицательной полярности с тахогенератора поступает на вход регулятора 11, с выхода которого появляется положительное напряжение не более 0,8В, так как диод 19 шунтирует вход регулятора. На входе и выходе усилителя 12 напряжения равны нулю, так как диод 3 не пропуска ет положительное напряжение. 1М режим. Подали напряжение зада ния 1% до максимальной величины.Оно поступает на входы регуляторов. На регуляторе 11 происходит суммирова-г ние двух разнополярных напряжений одинаковой величины. Так как коэффициенты усиления по входам одинаковые, то напряжение на выходе регулятора 11 будет равно нулю. На регуляторе 12 напряжение положительной полярности только по одному входу, а поэто(иу на выходе будет отрицательное напряжение U той же величины. IVрежим. Скорость ленты конвейера 7 уменьшилась. Напряжение коррекции Uyp на входе регулятора 11 тоже уменьшилось, а поэтому на выходе регулятора появилось отрицательное напряжение U ,равное разности напряжений Ugy - и . Напряжение U поступает на вход регулятора 12 и суммируется с напряжением входа Uм. Разность этих напряжений будет равна отрицательному выходному напряжению Ugj,, блока коррекции. Таким образом, уменьшение скорости конвейера приводит к уменьшению сигнала задания производительности с блока 2. Vрежим. Конвейер остановился. Напряжение с тахогенератора U j. равно нулю, на входе регулятора 11 осталось только напряжение , а поэтому с выxoдia названного регулятора напряжение будет равным напряжению входа, но противоположной полярности. Регулятор 12 суммирует два равных напряжения с протиеоположными полярностями, следовательно напряжение выхода UgjijypaBHo нулю. VIрежим. Запустили конвейер 7 до номинальной скорости. Одновременно увеличивается напряжение тахогенератора , уменьшается напряжение и и увеличивается напряжение блока 2 коррекции до максимальной величины, равной Ugx. VIIрежим. С блока 1 задания производительности напряжение входа уменьшилось. Напряжение U остается без изменения, а напряжение и«. может увеличиться до +0,8В, которое далее не пропускается диодом 3. На выходе регулятора 12 напряжение уменьшилось пропорционально Un так как на втором входе регулятора 12 напряжение равно {нулю. VII I режим . Лента конвейера осанавливается. Напряжение с тахогенеатора и.р уменьшается, но отрицаельное выходное напряжение U егуляторе 11 появится только тогда, огда U-. будет меньше и.,„. С этого I омента будет уменьшаться напряжение
на выходе Ugj,, ре гуля тора 12 до нуля, так как сумма U будет уменьшаться и в конечном итоге напряжения будут равными .
IX режим. Он показывает, что при неработающем конвейере 7 при любом задании производительности с блока 1 на выходе блока 2 напряжение ,1 1равно нулю.
Таким образом, блок 2 коррекции является ;аналоговым корректором сигнала задания в зависимости от скорости ленты конвейера. При скорости ленты конвейера, равной нулю, блок
0363728
не разрешает прохождение сигнала задания на вход блока 3 регулирования.
Устройство для регулирования производительности дробилки позволяет плавно регулировать скорость изменения подачи материала в дробилку при изменении скорости ленты отходящего конвейера. Этим достигается 0 уменьшение износа оборудования,
уменьшение аварийных случаев: перегрузка и завал конвейера, порыв, зак линивание, буксование ленты на ведущем ролике. 
| название | год | авторы | номер документа |
|---|---|---|---|
| Система регулирования многостадийного процесса дробления | 1987 |
|
SU1500366A1 |
| Устройство для регулирования производительности дробилки | 1983 |
|
SU1135493A1 |
| УСТРОЙСТВО для РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ЩЕКОВОЙДРОБИЛКИ | 1972 |
|
SU335001A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОЦЕССОМ ДРОБЛЕНИЯ | 2015 |
|
RU2595739C1 |
| Устройство для регулирования производительности дробилки | 1974 |
|
SU494188A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Устройство регулирования производительности дробилки | 1981 |
|
SU984487A1 |
| Способ и система адаптивного управления загрузкой дробилки | 1985 |
|
SU1251952A1 |
| Способ управления электроприводом экскаватора и устройство для его осуществления | 1990 |
|
SU1740573A1 |
| Способ управления многодвигательным электроприводом | 1987 |
|
SU1450066A1 |
Фиг
II -ибыж
фиг.З и8янлле .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Поршень для воздушных тормозов с сжатым воздухом | 1921 |
|
SU188A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 2898956/29-33, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
