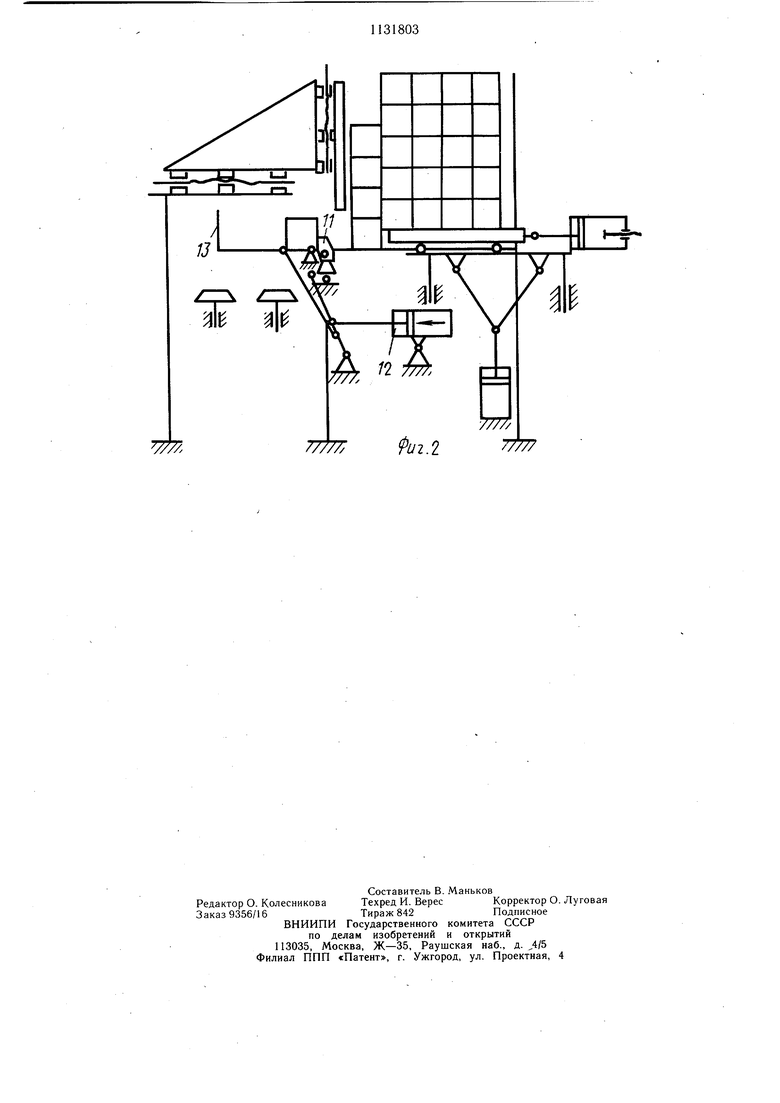
Изобретение относится к устройствам для разборки пакетов штучных грузов, которые сформированы в пакет без перевязки стыков. Известна пакеторазборная машина для штучных грузов, содержащая стеллаж со стенками, размешенные под ним подъемноопускную платформу и приводной толкатель, смонтированный на каретке с возможностью горизонтального перемешения 1. Однако это устройство не может обеспечить поштучную выдачу грузов различных типоразмеров из слоев пакета без дополнительного оборудования для разборки слоев. Цель изобретения - расширение технологических возможностей путем разборки пакета из П1тучных грузов различных типоразмеров. Указанная цель достигается тем, что машина снабжена установленной на подъемно-опускной платформе с возможностью перемещения в горизонтальной плоскости тележкой с р егулируемым ограничителем ее пере.меп1,ения и укладчиком, шарнирно закрепленным на стеллаже со стороны выдачи груза и кинематически связанным с кареткой толкателя, при этом толкатель закреплен на каретке шарнирно и подпружинен относительно нее, а стенка стеллажа со стороны выдачи груза установлена с возможностью перемещения в горизонтальной и вертикальной плоскостях. На фиг. 1 изображена кинематическая схема накеторазборной машины; на фиг. 2 - схема по.южений кине.матических звеньев при выдаче штучного груза. Пакеторазборная машина для штучных грузов содержит стеллаж 1 с подвижной стенкой 2, снабженной винтовыми парами 3 и 4 для регулировки по вертикали и горизонтали относительно пакета изделий П1тучных грузов, тележку 5, вертикально подвижную посредством тяг 6 от пневмоцилиндра 7 и с возможностью возвратнопоступательного движения по подъемноопускной платформе 8 от пневмоцилиндра 9, ограничитель перемещения 10 которого установлен на размер пакета, подпружиненный и шарнирно установленный толкатель 11 системой рычагов соединен с пневмоцилиндром 12 и укладчико.м щтучного груза 13. Устройство работает следующим образом. Стенка 2 при помощи винтовых пар 3 и 4 устанавливается так, чтобы размер от плоскости стеллажа 1 до нижнего края стенки 2 был несколько больше, чем вертикальная сторона разбираемого штучного груза. а размер между поверхностью стенки 2 и плоскостью, проходящей через торец тележки 5 при нахождении ее в крайнем левом положении, был несколько больше размера горизонтальной стороны разбираемого груза, на эту же величину при помощи ограничителя 10 настраивается ход тележки 5. После настройки подвижной стенки 2 и хода тележки 5 пакет укладывается на стеллаж 1 вплотную к стенке 2. Тележка 5 находится в крайнем левом положении (см. фиг. 1). Затем при помощи пневмоцилиндра 7 через тяги 6 происходит подъем тележки 5, находящейся на подъемно-опускной платформе 8, вместе с лежащим на ней пакетом без первой стопы. Подъем тележ ки 5 производится на величину, необходимую для нормальной работы подпружиненного толкателя 11. Толкатель 11 (civi. фиг. 2) при помощи пневмоцилиндра 12 через систему рычагов производит выталкивание нижнего ряда грузов до захода его на укладчик 13. При обратном ходе штока пневмоцилиндра 12 толкатель II возвращаетсй в первоначаль™ положение, а укладчик 13 опускается и грузы скатываются по наклонной плоскости укладчика и укладываются на рольганг, откуда поступают на дальнейшую обработку. После выталкивания нижнего ряда стопа под собственным весом опускается на стеллаж 1 и новый ряд грузов занимает место изъятого. После окончания разбора изделий первой стопы тележки 5 опускается при помощи пневмоцилиндра 7 ниже плоскости стеллажа 1 и перемещается пневмоцилиндром 9 на один щаг в правую сторону. После этого повторяется операция подъема тележки 5 с отделением следующей стопы от пакета. При помощи пневмоцилиндра 9 тележка 5 приводится в движение и своим торцом упирается в нижний ряд грузов стопы и по стеллажу доталкивает стопу в зону действия толкателя 11, перемещая оставшуюся часть пакета. Операция по выдаче груза повторяется. а затем повторяются операции по отделению очередной стопы от пакета и ее доталкивание в зону действия толкателя. В зависимости от длины разбираемого пакета может быть установлено два и более устройств с синхронной работой. Использование предложенной пакеторазборной машины позволяет расширить диапазон типоразмеров разбираемых штучных грузов из пакетов различных габаритов.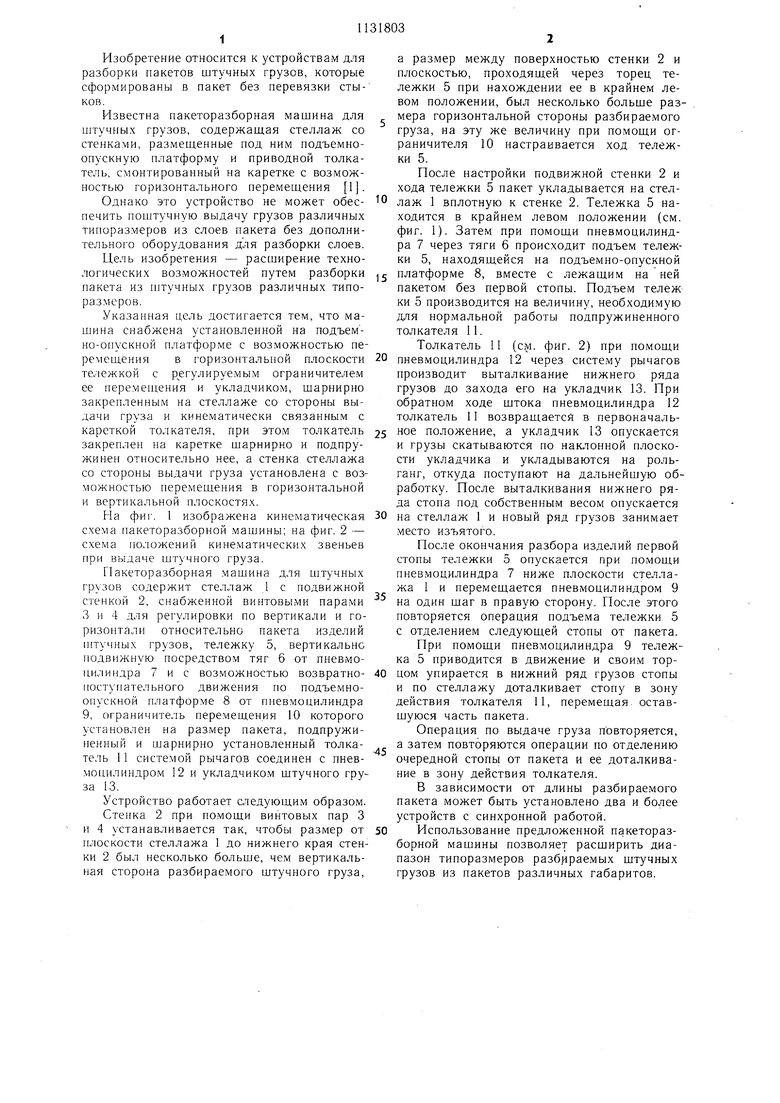
| название | год | авторы | номер документа |
|---|---|---|---|
| Пакеторазборная машина для штучных грузов | 1983 |
|
SU1193078A1 |
| Пакеторазборная машина для штучных грузов | 1990 |
|
SU1768480A1 |
| Машина для формирования пакета штуч-НыХ гРузОВ HA пОддОНЕ | 1978 |
|
SU816915A1 |
| Пакеторазборная машина для штучных грузов | 1972 |
|
SU474479A1 |
| Пакеторазборная машина | 1983 |
|
SU1156995A1 |
| Устройство для расформирования пакета мешков | 1981 |
|
SU992365A1 |
| Пакетоформирующая машина | 1984 |
|
SU1168497A1 |
| ПАКЕТОФОРМИРУЮЩАЯ МАШИНА | 1973 |
|
SU406787A1 |
| Пакеторазборная машина для штучных грузов | 1979 |
|
SU889575A1 |
| Машина для разборки пакетовшТучНыХ гРузОВ | 1979 |
|
SU816916A1 |
ПАКЕТОРАЗБОРНАЯ МАШИНА ДЛЯ ШТУЧНЫХ ГРУЗОВ, содержащая стеллаж со стенками, размещенные под ним подъемно-опускную платформу и приводной толкатель, смонтированный на карет ке с возможностью горизонтального переJ . 2 |1 (Л оо 00 о оо мещения, отличающаяся тем, что, с целью расщирения технологических возможностей путем разборки пакета из щтучных грузов различных типоразмеров, она снабжена установленной на подъемно-опускной платформе с возможностью перемещения в горизонтальной плоскости тележкой с регулируемым ограничителем ее перемещения и укладчиком, шарнирно закрепленным на стеллаже со стороны выдачи груза и кинематически связанным с кареткой толкателя, при этом толкатель закреплен на каретке щарнирно и подпружинен относительно нее, а стенка стеллажа со стороны выдачи груза установлена с возможностью перемещения в горизонтальной и вертикальной плоскостях.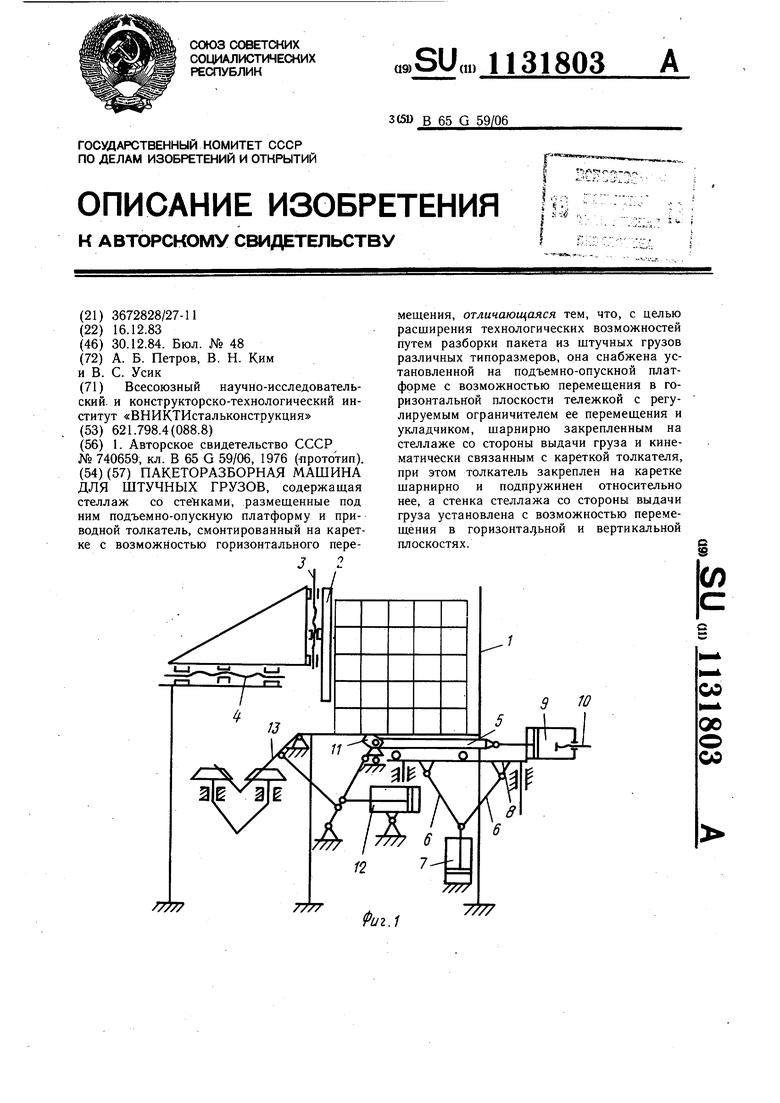
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для поштучной выдачи изделий из стопы | 1976 |
|
SU740659A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
