со
о
со
Изобретение относится к машиностроению, в частности к- отраслям, где применяются механизмы с пневмогидроприводами шагового перемеш,ения.
Известен пневмогидропривод шагового перемещения, содержащий по меньшей мере один силовой цилиндр с установленными на нем фиксаторами с приводными цилиндрами, опору, взаимодействующую с фиксаторами, и командное устройство для управления силовым цилиндром и фиксаторами, установленное с возможностью синхронизации их работы и соединения с источником давления 1.
Недостатком известного устройства является низкая надежность, вызванная сложностью конструкции, обусловленной необходимостью подвода двух источников энергии и наличием отдельных датчиков для управления работой силового цилиндра.
Цель изобретения - повышение надежности.
Указанная цель достигается тем, что в пнев.могидроприводе шагового перемещения, содержащем по меньшей мере один силовой цилиндр с установленными на нем фиксаторами с приводными цилиндрами, опору, взаимодействующую с фиксаторами, и командное устройство , установленное с возможностью синхронизации их работы и соединения с источником давления, командное устройство выполнено в виде трех пневмогидрораспределителей, золотник первого из которых для его переключения кинематически связан с рабочим органом силового цилиндра, и установлен с возможностью переключения золотника второго пневмогидрораспределителя для поочередного сообщения одноименных полостей силового цилиндра с источником давления или сливом (выхлопом), а также для поочередного подключения соответствующих приводных цилиндров фиксаторов к источнику давления через рабочие полости третьего пневмораспределителя, причем последний установлен с возможностью реверсирования привода.
При этом .опора выполнена неподвижной, а силовой цилиндр установлен с возможностью перемещения относительно опоры.
Кроме того, опора выполнена в виде цилиндра, установленного с возможностью дискретного вращения относительно неподвижной оси.
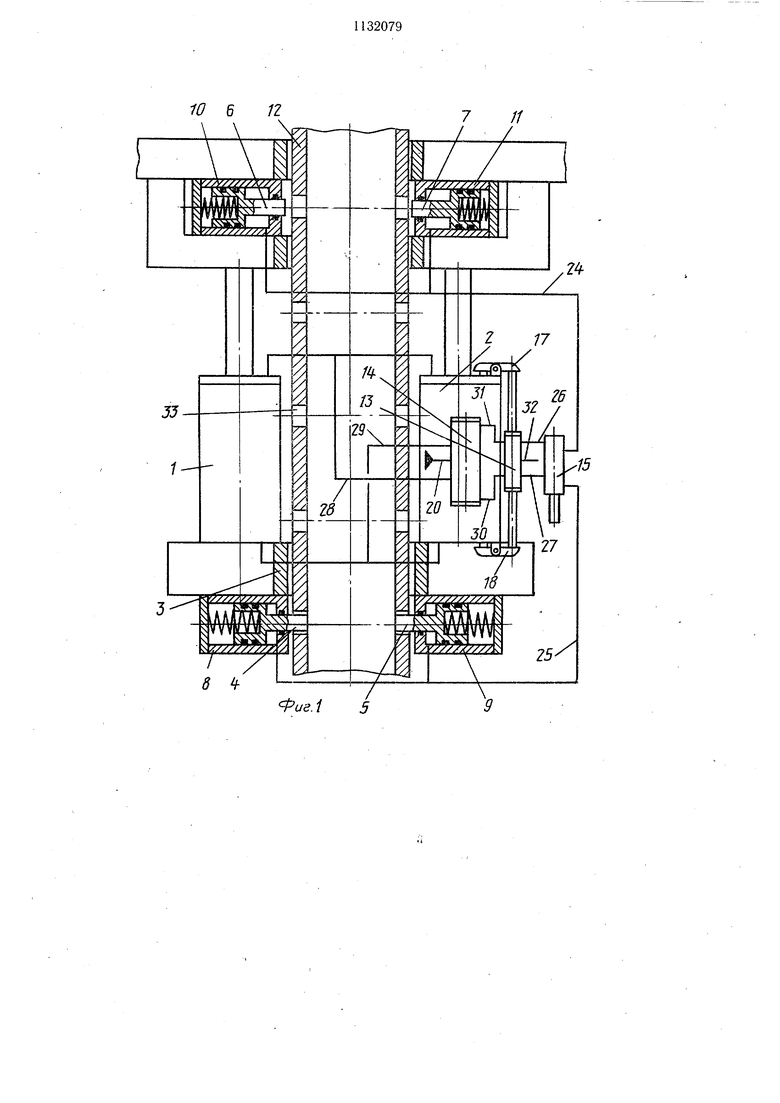
На фиг. 1 изображена схе.ма устройства, при варианте исполнения пневмогидропривода с неподвижной опорой и подвижным силовым цилиндром; на фиг. 2 - командное устройство; на фиг. 3 - схема предлагаемого устройства, при варианте исполнения пневмогидропривода с выполнением опоры в виде круга, установленного с возможностью дискретного вращения относительно неподвижной оси.
Пневмогидропривод шагового перемещения содержит силовые цилиндры 1 и 2, установленные на кольце 3 с фиксаторами 4, 5, 6 и 7 с их приводными цилиндрами 8, 9,
10 и И, опору 12, взаимодействующую с фиксатор-ами 4-7. Командное устройство, выполненное в виде пневмогидрораспределителей 13, 14 и 15. Золотник 16 пневмогидрораспределителя 13 кинематически связан рычагами 17 и 18 с рабочим органом силового цилиндра 2 и установлен с возможностью переключения золотника 19 пневмогидрораспределителя 14 для поочередного сообщения одноименных полостей силовых цилиндров 1 и 2 с источником давления 20
или сливом (выхлопом) 21, а также поочередного подключения соответствующих приводных цилиндров 8-11 фиксаторов 4-7 через рабочие полости 22 и 23 пневмораспределителя 15. Пневмогидрораспределитель 15 соединен магистралями 24 и
25 с рабочими полостями приводных цилиндров 8-11 и магистралями 26 и 27 - с пневмогидрораспределителем 13. Пневмогидрораспределитель 14 магистралями 28 и 29 соединен с одноименными полостями силовых цилиндров 1 и 2, а магистралями 30 и 31 - с пневмогидрораспределителем 13, к которому подведена напорная магистраль 32. Опора 12 снабжена фиксирующими гнездами 33. Пневмогидрораспределитель 15 содержит реверсирующий золотник 34.
При использовании пневмогидропривода в качестве привода вращения фиксаторы 4 и 5 установлены на рычагах 35 и 36, соединенных шарниром 37.
Распределитель работает следующим образом.
При движении штоков силовых цилиндров 1 и 2 вниз в конце хода золотник 16 перемещается в одно из крайних положений, открывая вначале магистрали 26 и 27 и
обеспечивая при этом переключение приводных цилиндров 8-11 и фиксаторов 4-7. Так как рабочее тело подается по магистрали 32 к пневмогидрораспределителю 13, то открытие магистрали 26 обеспечивает подачу рабочего тела под давлением из этой магистрали через пневмогидрораспределитель 15 по магистрали 24 к приводным цилиндрам 10 и 11, обеспечивая размыкание фиксаторов 6 и 7. Одновременно открытие магистрали 27 обеспечивает сообщение
полостей приводных цилиндров 8 и 9 через магистрали 27 и 25 .со сливом (выхлопом) 21. При этом под действием: пружин фиксаторы 4 и 5 замыкаются, западая в гнезда 33 опоры 12. Так как при этом магистрали 30 и 31 еще не открыты, то штоки
силовых цилиндров 1 и 2 продолжают двигаться вниз, заставляя перемещаться золотник 16 в крайнее положение. Открытие магистрали 31 обеспечивает подачу рабочего тела к одной из торцовых полостей пневмогидрораспределителя 14, при этом одновременно открывается магистраль 30, обеспечивая выпуск рабочего тела из противоположной торцовой полости. Золотник 19 перемещается в крайнее .положение, при этом рабочее тело, подаваемое из источника давления 20 к пневмогидрораспределителю 14, направляется по магистрали 29 к нижним полостям силовых цилиндров 1 и 2. Верхние полости силовых цилиндров 1 и 2 соединяются со сливом (выхлопом) 21 черкез магистраль 28. Происходит реверс поршней и ui гокон силовых цилиндров 1 и 2, в результате чего штоки начинают двигаться вверх, так как при этом t кольцо 3 зафиксировано на опоре 12 при помощи фиксаторов 4 и 5, а фиксаторы 6 и 7 выведены из гнезд 33 опоры 12, кольцо 3 с грузом поднимается па величину хода штоков силовых цилиндров 1 и 2, до тех пор, пока фиксаторы 6 и 7 не окажутся на уровне следующего ряда гнезд 33 на опоре 12. При подходе к верхнему положению шток силового цилиндра 2 перемещает золотник 16 в другое крайнее положение, при этом .магистра.ть 27 открывает подачу рабочего тела по магистралям 27 и 25 и приводным цилиндрам 8 и 9 фиксаторов 4 и 5. Одновременно из-за открытия магистрали 26 полости приводных цилиндров 10 и 11 соединяются со сливом (выхлопом) 21, в результате чего фиксаторы 6 и 7 под действием пружин вводятся в гнезда 33. При дальнейщем движении золотника 16 в другое крайнее положение, обеспечивая подачу рабочего тела, а магистраль 31 соединяя со сливом (выхлопом) 21, золотник 19 перемещается в противоположное положание, обеспечивая подачу рабочего тела в верхние полости цилиндров 1 и 2 и соединение их нижних полостей со сливом (выхлопом) 21. После того, как фиксаторы 6 и 7 полностью возьмут на себя нагрузку, фиксаторы 4 и 5 под действием давления рабочего тела в приводных цилиндрах 8 и 9 выводятся из гнезд 33. Дальнейшее движение штоков силовых цилиндров 1 и 2 при зафиксированном кольце 3 приводит к подъему корпусов силовых цилиндров 1 и 2 вместе с кольцом 3 и фиксаторами 4 и 5 до тех пор, пока фиксаторы 4 и 5 не расположатся напротив следующих гнезд 33. Далее циклы шагового подъема привода с грузом вдоль неподвижной опоры 12 автоматически повторяются до тех пор, пока не будет закрыта подача рабочего тела из источника давления 20 и магистрали 26. Для того, чтобы обеспечить перемещение привода с грузом вниз по .опоре 12, необходимо золотник 34 переместить в противоположпое положение. При этом магистраль 26 сообщается с магистралью 25, а магистраль 27 - с магистралью 24, в результате чего изменяется чередование включений приводных цилиндров 8 и 9, и сам привод автоматически осуществляет шаговое перемещение вниз. Пневмогидропривод может перемещаться не только вдоль неподвижной опоры 12 в обоих направлениях. Например, при жестком закреплении к неподвижной станине (не показана) кольца 3 и выполнении опоры 12 незакрепленной предлагаемый привод может также поднимать и опускать платформу, подвешенную на штангах. Кроме того, Пневмогидропривод может работать как силовой реверсивный привод вращения. Для этого два рычага 35 н 36 с закрепленными на них фиксаторами 4 и 5 соединяются между собой шарниром 37, ось которого совпадает с осью вращения круговой опоры 12. Между концами рычагов 35 и 36 щарнирно закрепляется силовой цилиндр 2. Конструкция пневмогидрораспределителей 13, 14 и 15 и их соединение соответствует изображению на фиг. 2. Если рычаг 35 закрепить неподвижно и подать рабочее тело из источника давления 20 в магистраль 32, то незакрепленный рычаг 36 будет соверщать возвратно-качательное движение вокруг оси шарнира 37. При этом система пневмогидрораспределителеи срабатывает в описанной выше последовательности, обеспечивая сцепление и расцепление фиксаторов 4 и 5 с гнездами 33 опоры 12, которая будет вращаться в одном из направлений. Изменение направления вращения опоры 12 осуществляется перемещение.м золотника 34. Изобретение позволяет значительно повысить надежность пневмогидропривода и растить его функциопальиые возможности.
8
игЛ
11
7
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМОВАНИЯ | 2002 |
|
RU2251464C2 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ВОЗБУЖДЕНИЯ СЕЙСМИЧЕСКИХ ВОЛН | 2005 |
|
RU2289150C1 |
| Устройство управления бесшаботным молотом | 1986 |
|
SU1362557A1 |
| КРАНО-МАНИПУЛЯТОРНАЯ УСТАНОВКА | 2003 |
|
RU2264347C2 |
| Газоструйная машина для очистки покрытий от снега и льда | 1976 |
|
SU604896A1 |
| Агрегат продольной резки рулонного материала | 1989 |
|
SU1712075A2 |
| Пневмогидропривод | 1981 |
|
SU1028907A1 |
| Гидравлическая бурильная машина ударного действия | 1982 |
|
SU1051260A1 |
| Поворотный позиционер | 1982 |
|
SU1079915A1 |
| ПНЕВМОГИДРАВЛИЧЕСКАЯ СТАНЦИЯ | 1992 |
|
RU2067695C1 |

1. ПНЕВМОГИДРОПРИВОД ШАГОВОГО ПЕРЕМЕЩЕНИЯ, содержащий по меньшей мере один силовой цилиндр с установленными на нем фиксаторами с приводными цилиндрами, опору, взаимодействующую с фиксаторами, и командное устройство для управления силовым цилиндром и фиксаторами, установленное с возможностью синхронизации их работы и соединения с источником давления, отличающийся тем, что, с целью повышения надежности, командное устройство выполнено в виде трех пневмогидрораспределителей, золотник первого из которых для его переключения кинематически связан с рабочим органом силового цилиндра и установлен с возможностью переключения золотника второго пневмогидрораспределителя для поочередного сообщения одноименных полостей си ювого цилиндра с источником давления или сливом (выхлопом), а также для поочередного подключения соответствующих приводных цилиндров фиксаторов к источнику давления через рабочие полости третьего пневмогидрораспределцтеля, причем последний установлен с возможностью . реверсирования привода. 2.Пневмогидропривод по п. 1, отличающийся тем, что опора выполнена неподвижной, а силовой цилиндр установлен с возможностью перемещения относительно опо@ ры. (Л 3.Пневмогидропривод по п. 1, отличающийся тем, что опора выполнена в виде цилиндра, установленного с возможностью дискретного вращения относительно неподвижной оси.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Подъемный механизм вертикального судоподъемника | 1979 |
|
SU872636A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
