Изобретение относится к машиностроению, в частности к зубчато-реечным приводам транспортных устройств автоматических линий.
Известно устройство шагового перемещения, содержаш.ее рейку, привод, основание с копирами, имеющими пазы, шарнирно установленные на концах основания двуплечие рычаги, на свободном конце одного из которых размещен ролик с возможностью взаимодействия с пазом копира 1.
Недостатком известного устройства является неточность останова, обусловленная резким изменением скорости, так как при перемещении рычаг с ударами входит в зацепление с зубом рейки.
Цель изобретения - повыщение точности останова.
Указанная цель достигается тем, .что в устройстве шагового перемещения, содержащем рейку, привод, основание с копирами, имеющими пазы, шарнирно установленные на концах основания двуплечие рычаги, на свободном конце одного из которых размещен ролик с возможностью взаимодействия с пазом копира, двуплечие рычаги размещены на концах рейки, на одном из плеч одного из них выполнен фигурный паз, устройство снабжено кривошипом, кинематически связанным с приводом пальцем, установленным на кривошипе с возможностью вращения и взаимодействия с фигурным пазом, и подшипником, закрепленным на одном конце рейки и несущим двуплечий рычаг с пазом.
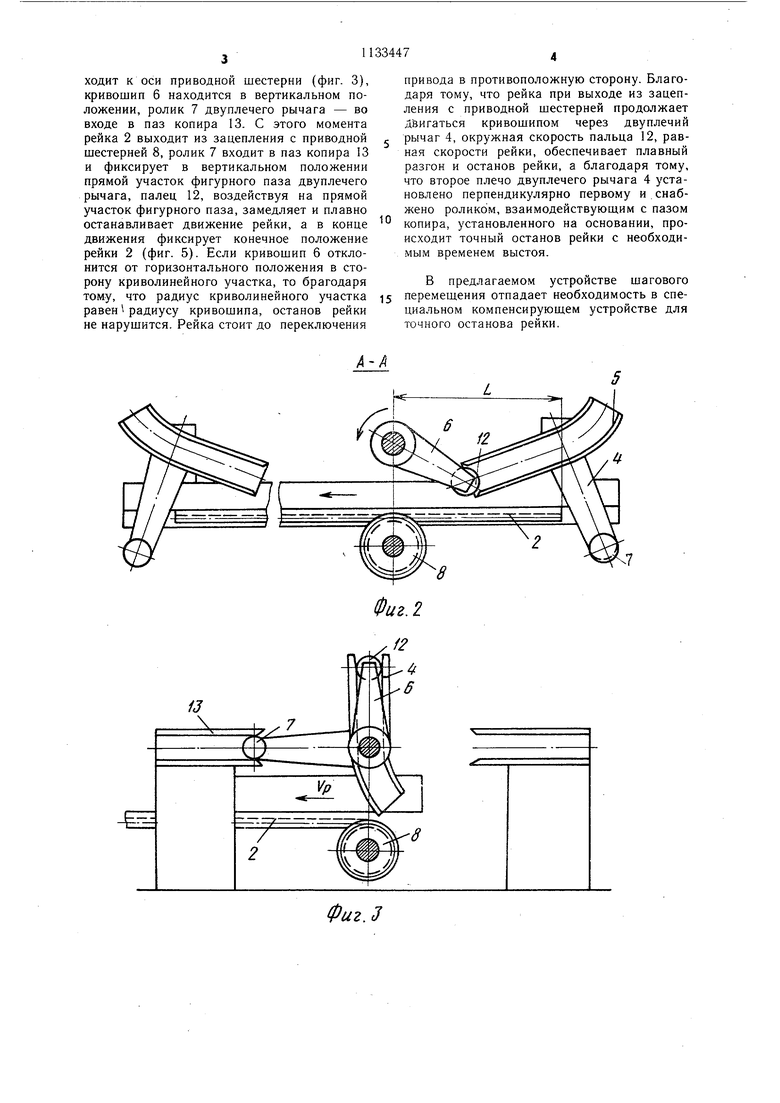
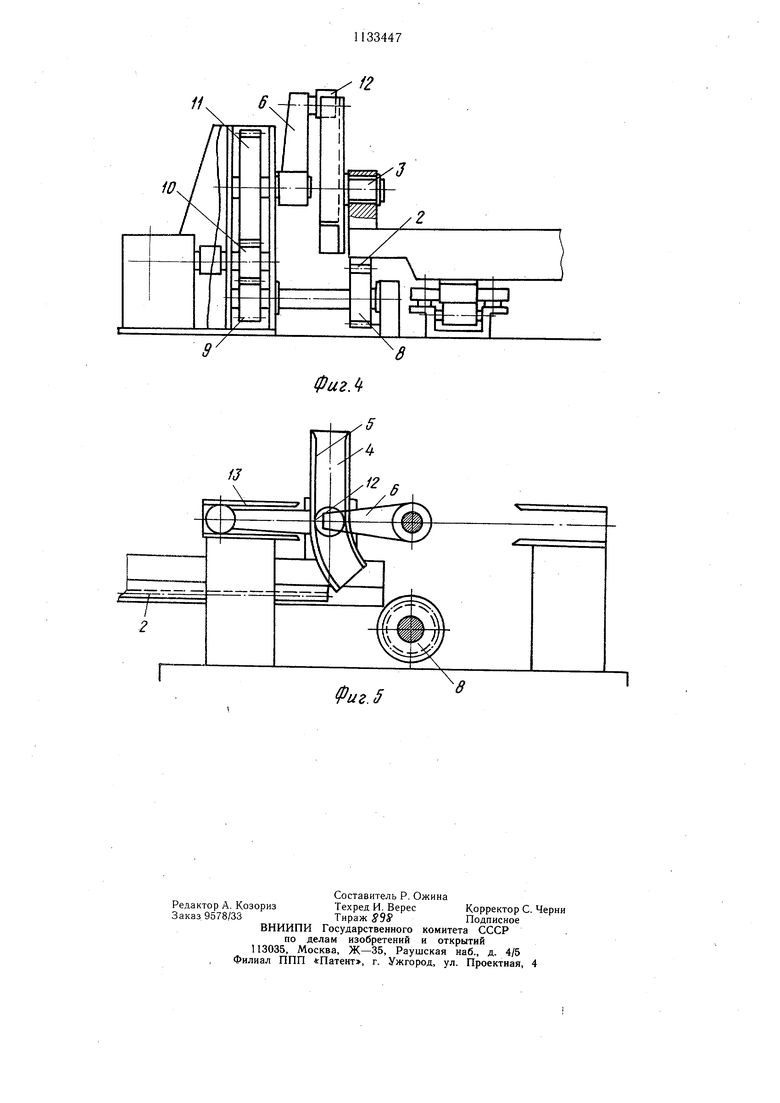
На фиг. 1 изображено устройство шагового перемещения, вид сверху; на фиг. 2- сечение А-А на фиг. 1 (момент начала взаимодействия подвижного пальца кривошипа с прямолинейным участком двуплечего рычага); на фиг. 3 - положение двуплечего рычага и кривошипа в момент выхода последнего зуба рейки из зацепления с приводной шестерней и такое же положение в момент входа с зацепление зуба рейки с приЕ одной шестерней в начале движения в обратном направлении; на фиг. 4 - то же, вид с торца; на фиг. 5 - конечное положение рейки-останов.
Устройство шагового перемещения содержит подшипник , закрепленный на одном конце рейки 2, установленный в нем на оси 3 качающийся двуплечий рычаг 4, на одном из плеч которого выполнен фигурный паз 5 с радиусным участком, равным радиусу кривошипа 6, другое плечо установлено перпендикулярно первому и снабжено роликом 7.
Такой же двуплечий рычаг установлен на другом конце рейки 2. Привод, выполненный в виде шестерни 8, установлен на неподвижной оси, совпадающей в вертикальной плоскости с осью врашения кривошипа 6, и кинематически связан с ним через шестерни 9-II. На конце кривошипа 6 установлен вращающийся палец 12. На основании (не показано) установлены два копира 13 на расстоянии от оси вращения кривошипа 6, равном расстоянию от оси вращения двуплечего рычага 4 до оси ролика 7. Копиры выполнены с пазами, ось которых равна диаметру ролика 7. Радиус кривошипа 6 и радиус делительной окружности приводной шестерни 8 подбирается таким образом, чтобы окружная скорость пальца 12 равнялась скорости Vp рейки 2. В данном случае радиус кривошипа 6 больше радиуса делительной окружности шестерни 8 в три раза, поэтому за один оборот кривошипа б шестерня 8 выполняет три оборота.
Двуплечие рычаги 4 занимают положение показанное на фиг. 2, принудительно (пружиной, массой). Исходное положение устройства показано на фиг. 5: рейка 2 фиксируется в крайне.м левом положении воздействием пальца 12 кривошипа 6, находяшегося в горизонтальном положении, на фигурный паз двуплечего рычага 4, ролик которого
5 входит в паз копира 13, что исключает возможность поворота двуплечего рычага 4.
Устройство шагового пере.мещения работает следующим образом.
При вращении шестерни 8 и кривошипа 6
по часовой стрелке палец 12 кривошипа 6, воздействуя на прямой участок фигурного паза двуплечего рычага 4, плавно трогает с места и разгоняет рейку 2. Ролик 7 двуплечего рычага 4 в это время движется
2 по пазу копира 13, что исключает возможность вращения двуплечего рычага 4. Когда кривошип 6 достигает вертикального положения (фиг. 3), скорость движения рейки равняется окружной скорости делительного цилиндра шестерни 8, рейка 2 входит в
О зацепление с шестерней 8, а ролик 7 подходит к выходу из паза копира 13. Дальнейшее движение рейки 2 происходит от шестерни 8. Ролик 7 выходит из паза копира 13, кривошип 6 возвращает двуплечий рычаг 4
5 в исходное положение и палец 12 выходит из фигурного паза двуплечего рычага 4.
На фиг. 2 показан момент выхода или входа пальца 12 кривошипа 6 для случая с передаточным отношением 1/3 между кривошипом 6 и приводной шестерней 8, где
0 L равно длине делительной окружности приводной шестерни 8.
Останов рейки 2 в конце движения происходит следующим образом.
В положении, показанном на фиг. 2, где 5 стрелками обозначены направления движения и вращения, палец 13 кривошипа 6 начинает поворачивать двуплечий рычаг 4 по часовой стрелке. Когда конец рейки подходит к оси приводной шестерни (фиг. 3), кривошип 6 находится в вертикальном положении, ролик 7 двуплечего рычага - во входе в паз копира 13. С этого момента рейка 2 выходит из зацепления с приводной шестерней 8, ролик 7 входит в паз копира 13 и фиксирует в вертикальном положении прямой участок фигурного паза двуплечего рычага, палец 12, воздействуя на прямой участок фигурного паза, замедляет и плавно останавливает движение рейки, а в конце движения фиксирует конечное положение рейки 2 (фиг. 5). Если кривошип 6 отклонится от горизонтального положения в сторону криволинейного участка, то брагодаря тому, что радиус криволинейного участка равен радиусу кривошипа, останов рейки не нарушится. Рейка стоит до переключения
привода в противоположную сторону. Благодаря тому, что рейка при выходе из зацепления с приводной шестерней продолжает д&игаться кривошипом через двуплечий рычаг 4, окружная скорость пальца 12, равная скорости рейки, обеспечивает плавный разгон и останов рейки, а благодаря тому, что второе плечо двуплечего рычага 4 установлено перпендикулярно первому и снабжено роликом, взаимодействующим с пазом копира, установленного на основании, происходит точный останов рейки с необходи.мым временем выстоя.
В предлагаемом устройстве шагового перемещения отпадает необходимость в специальном компенсирующем устройстве для точного останова рейки.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| Швейная машина зигзаг | 1982 |
|
SU1089189A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Поточная линия для обработки изделий | 1982 |
|
SU1081101A1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2333829C1 |
| Устройство для шаговой подачи заготовок в зону обработки | 1984 |
|
SU1346306A1 |
| ПОВОРОТНО-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО | 2013 |
|
RU2540250C1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Устройство для гофрирования ленты | 1991 |
|
SU1794536A1 |
| РЕВЕРСИВНЫЙ ПРОКАТНЫЙ СТАН | 1996 |
|
RU2112614C1 |
УСТРОЙСТВО ШАГОВОГО ПЕРЕМЕЩЕНИЯ, содержащее рейку, привод, основаиие с копирами, имеющими пазы, шарнирно установленные на концах основания двуплечие рычаги, на свободном конце одного из которых размещен ролик с возможностью взаимодействия с пазом копира, отличающееся тем, что, с целью повышения точности останова, двуплечие рычаги размещены на концах рейки, на одном из плеч одного из них выполнен фигурный паз, устройство снабжено кривошипом, кинематически связанным с приводом пальцем, установленным на кривошипе с возможностью вращения и взаимодействия с фигурным пазом и подшипником, закрепленным на одном конце рейки и несущим двуплечий рычаг с пазом. ® оо со 4ii 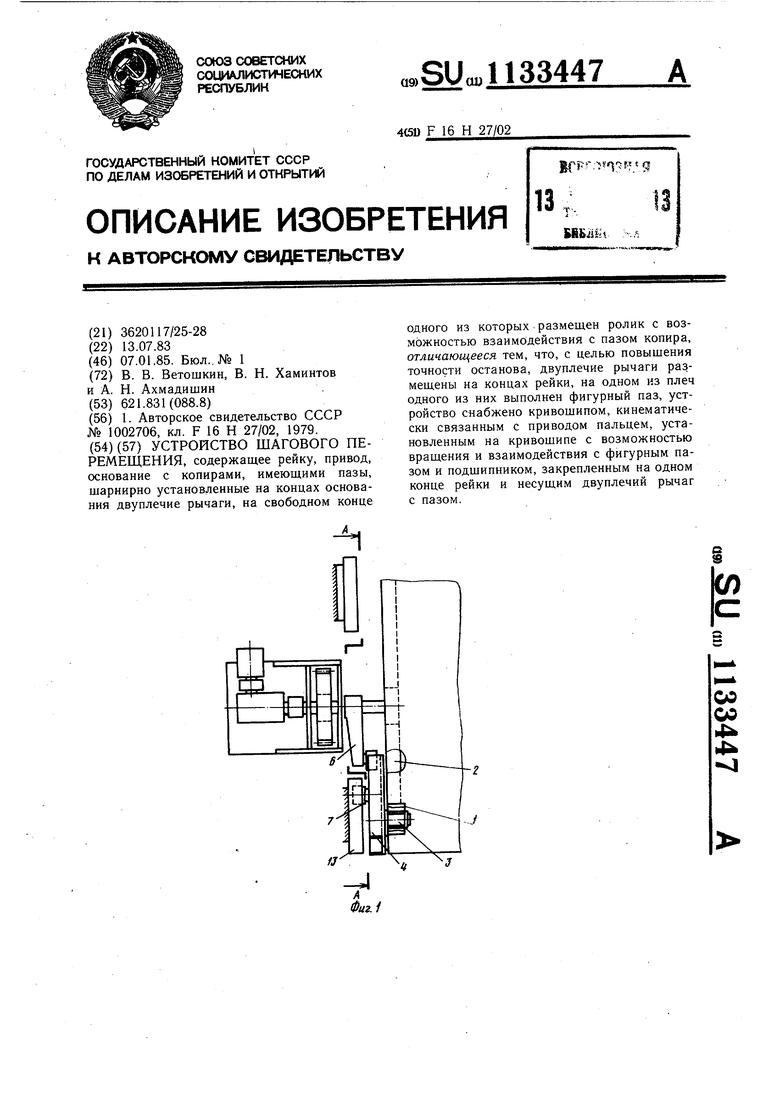
Фиг. 2
Фиг.З
ФигЛ
Фиг. 5
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство шагового перемещения зубчатой рейки | 1979 |
|
SU1002706A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
