оо 1
О)
| название | год | авторы | номер документа |
|---|---|---|---|
| Позиционная система программного управления перемещением транспортного механизма | 1973 |
|
SU480083A1 |
| Позиционная система программного управления перемещением транспортного механизма | 1972 |
|
SU447341A1 |
| Устройство программного адресования транспортного средства | 1983 |
|
SU1113337A1 |
| Устройство для цифрового управления транспортным механизмом | 1977 |
|
SU737958A1 |
| Устройство для программного управления транспортным механизмом | 1983 |
|
SU1087959A1 |
| Устройство управления приводом перемещения транспортного механизма | 1988 |
|
SU1661080A1 |
| Устройство для управления перемещением механизма по замкнутой трассе | 1988 |
|
SU1594486A1 |
| Устройство для управления транспортными средствами | 1987 |
|
SU1437879A1 |
| Устройство для управления координатным транспортным средством | 1990 |
|
SU1718234A1 |
| Устройство программного управления подвижным объектом | 1976 |
|
SU615011A1 |
ПОЗИЦИОННАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ТРАНСПОРТНОГО МЕХАНИЗМА по авт.св. № 480083, отличающаяся тем, что, с целью повьшения надежно сти она снабжена пороговым устройством, один вход которого подключен к первому выходу программного устройства, другой - к шине ввода числа адресов рабочих позиций, а выход к третьему входу блока блокировок и управления приводом и шине ввода внешней информации в программное устройство.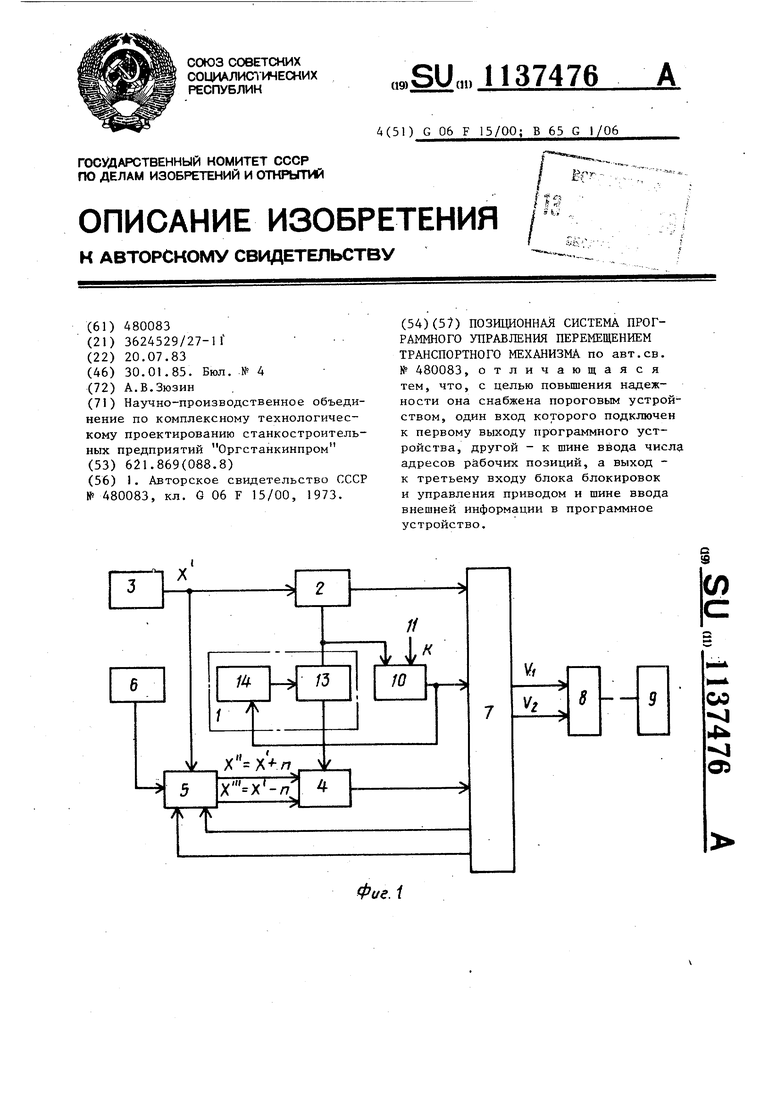
Фие. i
1
Изобретение относится к автоматике и может быть использовано в системах программного управления объектом, перемещаемом в определенной последовательности по рабочим позициям технологической линии, в частности, ис1Й льзуется для управления перемещением стеллажного крана-штабелера,.
По основному авт.св. № 480083 известна позиционная система программного управления перемещением транспортного механизма, которая содержит блок ввода программы, соединенный с одним из входов основного и вспомогательного блоков сравнения выходы которых подключены к входу блока блокировок и управления приводом, и установленный на транспортном механизме цифратор перемещения, соединенный с другим входом основного блока сравнения, и снабжена блоком информации о положении механизма на линии и датчиком веса груза, укрепленным на механизме, причем к входам блока информации подключены цифратор перемещения,, датчик веса груза и вь1ходы блока блокировок и управления приводом,, а к выходам вспомогательный блок сравнения Щ.
Недостатком известной системы является невысокая надежность за счет того, что в ней не предусмотрена блокировка в случае поступления в систему недостоверной информации о позициях, отсутствующихна трассе перемещения транспортного механизма.
Цель изобретения - повышение надежности работы позиционной системы программного управления перемещением транспортного механизма.
Цель достигается тем, что позиционная система програмного управления снабжена пороговым устройством, один вход которого подключен к первому выходу программного устройства, другой - к шине ввода числа адресов рабочих позиций, а выход - к третьему входу блока блокировок и управления приводом и шине ввода внешней информации в программное устройство.
На фиг. показана структурная схема системы программного управления перемещением механизма;на фиг.2схема адресования этой системы.
Система состоит из программного устройства 1, основного блока 2 сравнения, цифратора 3 перемещения,.
7476J
вспомогательного блока 4 сравнения, блока 5 информации, датчика 6 веса груза на механизме, блока 7 блокировок и управления и приводом В 5 транспортного механизма 9, порогового устройства 10, шина 11 ввода ограничивающей информации, соответствующей числу адресов рабочих позиций, кодовых пластин 12. О Программное устройство I состоит из устройства 13 для ввода и запоминания программной информации, шины ввода внешней программной информации которая связана с внешним источниг 15 ком 14.
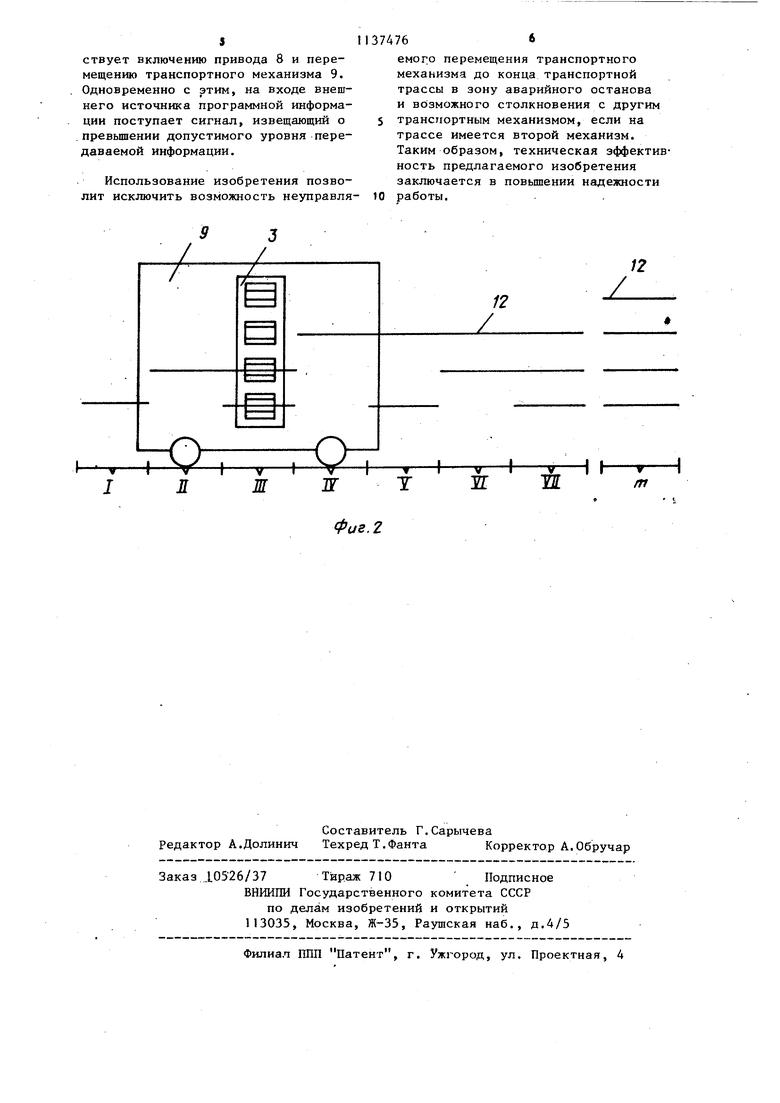
Цифратор 3 перемещения представляет собой систему безконтактных датчиков, установленных на механизме 9 и взаимодействующих с кодовыми 20 пластинами 12,расположенными вдол}а трассы перемещения механизма 9 в соответствии с одним из арифметических кодов, например, двоичным.
Программное устройство 1 служит
5 для запоминания и ввода программной информации,В соответствии с которой механизм 9 должен перемещаться к запрограммированной позиции. Внешний источник 14 программной информации
0 служит для создания в своей памяти динамической модели трассы и вырабатывания программной информации для управления транспортным механизмом в автоматическом режиме без участия человека-оператора.
Пороговое устройство 10 служит для ограничения вводимой из программного устройства 1 программной инфорйации.
Основной 2 и вспомогательный 4 блоки сравнения представляют собой цифровые нуль-органы. Основной блок 9 сравнения предназначен для сравнё ния программной информации X с информацией Х о фактическом положе НИИ механизма 9 на линии. Вспомогательный блок 4 сравнения предназначен для сравнения информации X программы со вспомогательной информацией X или X , поступающей с преобразователя блока 5 информации.
Блок 5 информации предназначен для создания вспомогательной информации, имеющей сдвиг относительно основной на и количество позиций
5 как в сторону отставанияj так и в сторону опережения, причем в устройстве предусмотрена возможность регулирования числа позиций сдвига. 3I Датчик 6 веса груза на механизме 9 предназначен для определения веса груза, который транспортирует механизм 9. В случае, если транспортировка груза производится в таре или на поддоне, датчик 6 определяет наличие тары на механизме 9. Информация с датчика 6 поступает на блок 5, регулируя величину вспомогательной информации. Блок 7 блокировок и управления приводом 8 построен так, что при движении транспортного механизма 9 вперед на блок 5 поступает запрет н сдвиг .вспомогательной информации в сторону отставания, а при движении механизма 9 назад - запрет на сдвиг вспомогательной информации в сторон опережения. Кроме,того, в блоке 7 предусмотрена блокировка на перёмещение транспортного механизма 9 в случае поступления сигнала с порого вого устройства 10-о превьппении уро ня вводимой программной информации. Предлагаемая позиционная система работает следующим образом. Транспортный механизм 9 находитс на третьей(1П|позиции без груза. Тре буется перемещение механизма к седь мой |VU) позиций. Предварительное отключение повышенной скорости долж но произойти за две позиции до позиции останова. С программного устройства 1 поступает программная информация на входы основного 2 и вспомогательного 4 -блоков сравнения. На другой вход основного блока сравнения поступает информаци с цифратора перемещения о фактическом положении механизма на линии, т.е. . Эта же информация поступает на вход блока 5. Так как , то основной блок сравнения определяет, что перемещение следует произвести от ПНй позиции к УП-й, т.е. двигаться вперед. При этом с блока 7 блокировок и управления на один из входов блока 5 поступает запрет на сдвиг вспомогательной информации в сторону, отставания. Блок 5 вьздает вспомогател ;кую информацию х со сдвигом опережения (основной информации Х )на дее позиции, т.е. 2 3 + 2 5. Этл информация поступает на вход вспомогательного блока 4 сравнения, которьй, сравнивая информацию X программы с вспомогательной информа цией Х, определяет, что , так 64 ... как и вьодает на блок 7 блокировок и управления команду перемещения Вперед. Выдача кбманд вперед как основг ным 2, так и вспомогательным 4 блоками сравнения является признаком для включения повышенной скорости перемещения 4 .Эта скорость будет включена до тех пор, пока механизм 9 не переместится на позицию 5. При этом произойдет совпадение информации X программы и вспомогательной информации X, , так как в этом положении X 7. Это состояние Ьтсутствие сигнала Вперед со вспомогательного блока 4 сравнения) является признаком для переключ.ения V, на V,, причем V, Ч, . Механизм 9 будет продолжать перемещение вперед на пониженно.й скорости до позиции УП, т.е. позиции останова, где . Система работает аналогично при программировании движения назад. С блока 7 блокировок поступает запрет на, вьщачу вспомогательной информации опережения X . При этом используется вспомогательная информация -п. В случае перемещЬния механизма 9 с грузом датчи.ка 6, воздействуя на блок 5, вызывает сдвиг вспомогательной информации на три позиции. Вся система работает аналогично тому, что было рассмотрено для случая перемещения без груза, за исключением того, что переключенные скоростиV произойдет не за две позиции, а за .три до позиции точного останова - тогда тормозной путь )5удет на одну позицию больше. Пороговое устройство работает следующим образом. Предположим, что емкость вания позиционной системы программного управления равна 100 адресам, а конкретная транспортная линия содержит V: адресов, Например k; 90. На второй вход порогового устройства по шине I1 подается постоянно информация, равная конкретному числу адресов k 90. Если по какой причине от щину 14 на устройство 13 ввода и запоминания поступит информация X, превьщ1ающая число к, то пороговое устройство вырабатьшает блокирующий сигнал, который, поступает на второй вход блока 7 блокировок и управления приводом 8, препятствует включению привода 8 и перемещению транспортного механизма 9. Одновременно с этим, на входе внешнего источника программной информации поступает сигнал, извещающий о превышении допустимого уровня передаваемой информации.
Использование изобретения позволит исключить возможность неуправля/
Фиг. 2
емого перемещения транспортного механизма до конца транспортной трассы в зону аварийного останова и возможного столкновения с другим транспортным механизмом, если на трассе Имеется второй механизм. Таким образом, техническая эффектиность предлагаемого изобретения заключается в повьщ1ении надежности работы.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Позиционная система программного управления перемещением транспортного механизма | 1973 |
|
SU480083A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
