2, Электропривод по п. 1, о т л ичающийся тем, что вторая сие тема управления тиристорным преобразователем частоты содержит два блока преобразования координат с двумя парами фазных входов в калодом, векторный фильтр с парой фазных входов, .парой фазных выходов и выходом по частоте вращения, генератор двухфазного напряжения с управляющим входом и элемент сравнения, первый вход которого образует первый вход второй системы управления тиристорным преобразователем частоты, причем второй вход Элемента сравнения подключен к , выходу по частоте вращения векторного фильтра, пара фазных входов которого подключена к выходам первого
11
блока преобразования координат, а пара фазных выходов - к первой паре, фазных входо второго блока преобразования координат, пофазно объединенные между собой первые и вторые входы обеих пар фазных входов первого блока преобразования координат образуют соответственно дпа других входа второй системы управления ти ристорньм преобразователем частоты, выход элемента сравнения подключен к управляющему входу генератора двухфазного йапряжения , соединенного выходами с второй парой фазных входов второго блока преобразования координат, выходы которого образуют выходы второй системы управления тирис-торным преобразователем частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров главного потокосцепления машины переменного тока | 1985 |
|
SU1319219A1 |
| Асинхронный частотно-управляемый электропривод | 1981 |
|
SU1020950A1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| Электропривод с векторным управлением | 1985 |
|
SU1292153A1 |
| Способ управления двигателем двойного питания, выполненным на базе асинхронного двигателя с фазным ротором, и устройство для его осуществления | 1987 |
|
SU1610589A2 |
| СПОСОБ ВЕКТОРНОЙ ОРИЕНТАЦИИ ТОКА ЭЛЕКТРОМЕХАНИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ ЭНЕРГИИ И УСТРОЙСТВО ВЕКТОРНОЙ ОРИЕНТАЦИИ ("ВЕКТОРИНГ") ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 1998 |
|
RU2141720C1 |
| Устройство для управления вентильным двигателем | 1987 |
|
SU1534661A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
1. ЧАСТОТНО-УПРАВЛЯЕМЫЙ СИНХРОННЫЙ ЭЛЕКТРОПРИВОД, содержащий синхронную электрическзю маимну с фaзным i обмотками на статоре и рОмоткой возбуждения на роторе, первый тиристори-ый преобразователь частоты, выходы которого связаны с фазными обмотками на статоре, а управляюи51е входы .подключены квыходам первой системы управления тиристорным преобразователем частоты, входы которой подключены к выходу блока задания скорости и выходам датчика положения, установленного на роторе синхронной электрической машины,о т л и ч а ющ и и с я тем, что, с целью пойышения точности регул1{5ования скорости, в него введены второй тиристорный преобразователь частоты и вторая система управления тиристорным преобразователем частоты, а каждая фазная обмотка на статоре синхронной электрической машины составлена из четырех групп катушек, включенных в мостовую схему, причем первые диагональные выводы мостовой схемы подключены к выходам первого тиристорного преобразователя частоты, вторые диа- g гональные выводы мостовой схемы к выходам второго тиристорного преобразователя частоты, управляющие входы которого подключены к выходам второй | системы управления тиристорным пре- ; образователен частоты, первый вход которой г одключен к выходу блока задания скорости, а два других входа к вь ходам датчика положения. 00 00 со о:
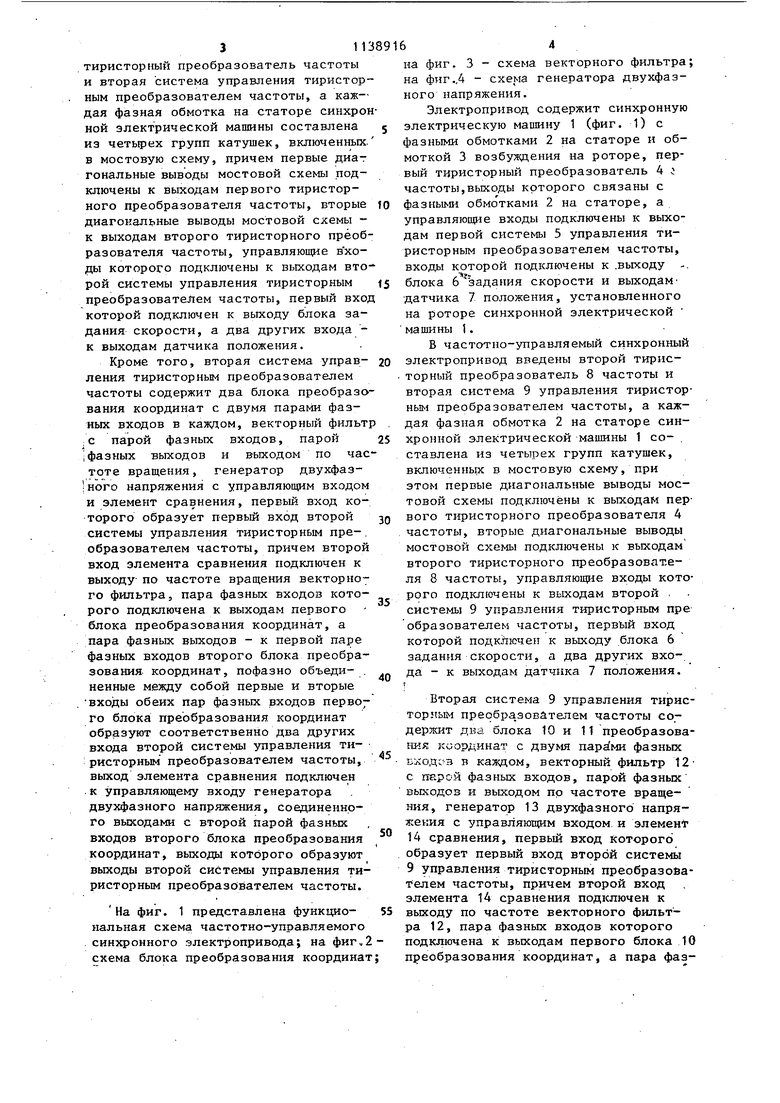
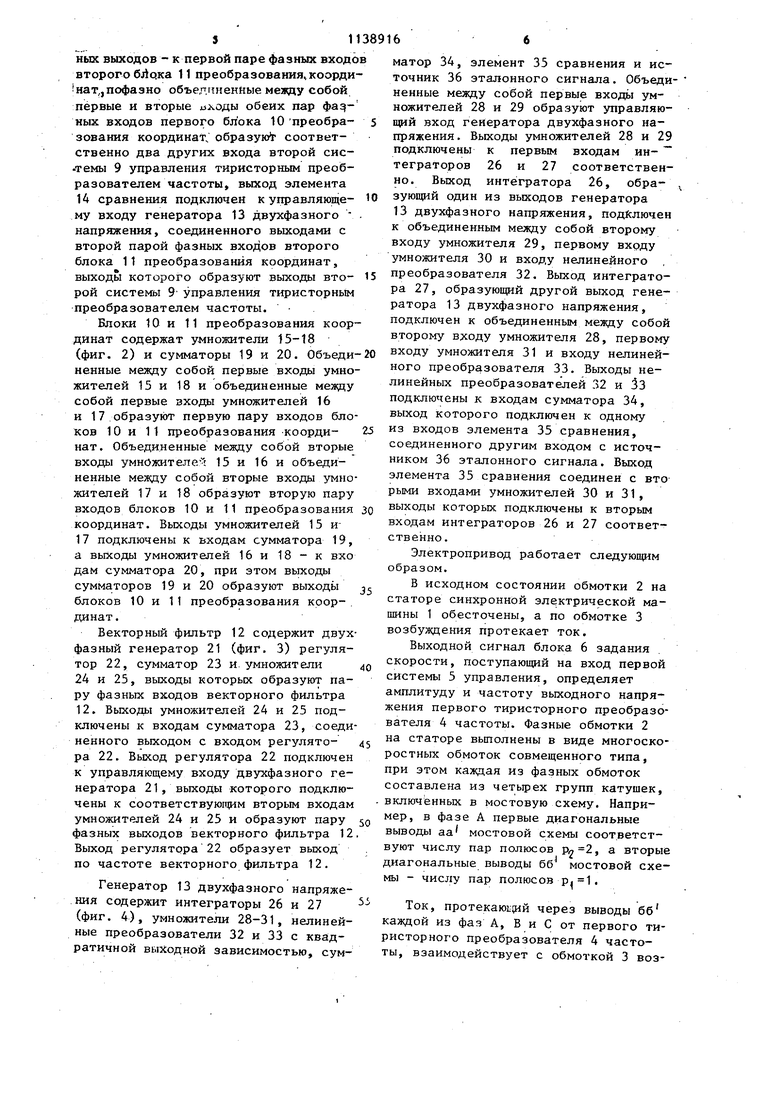
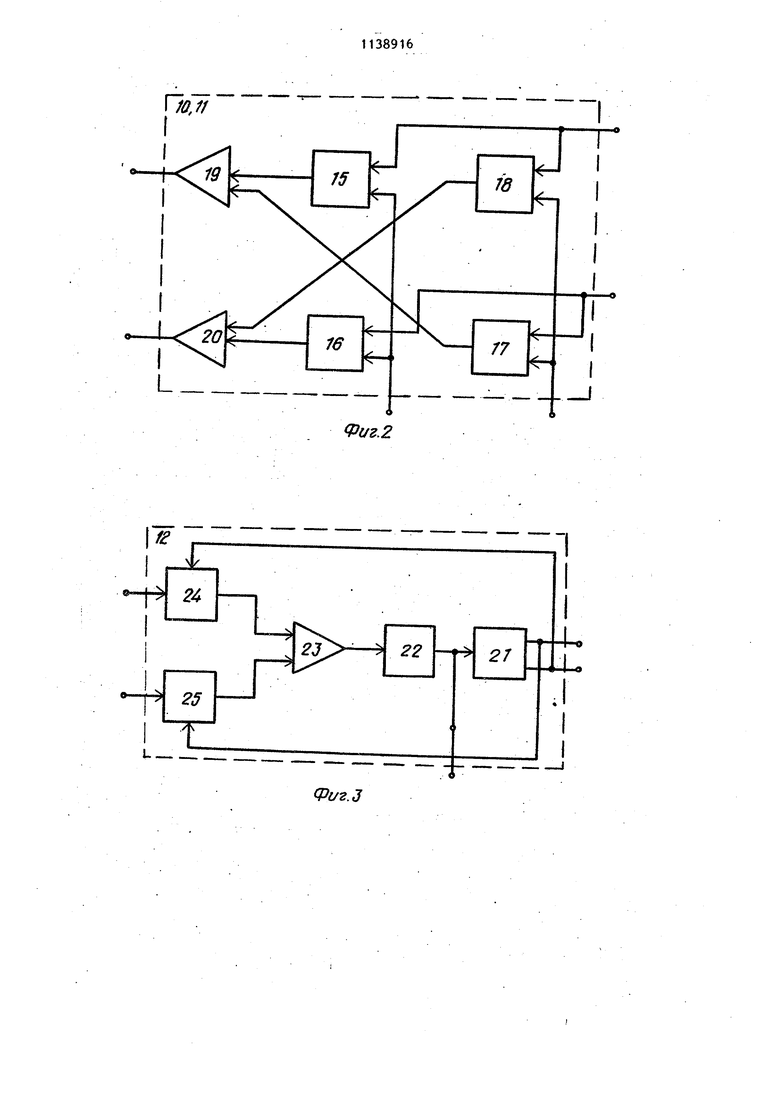
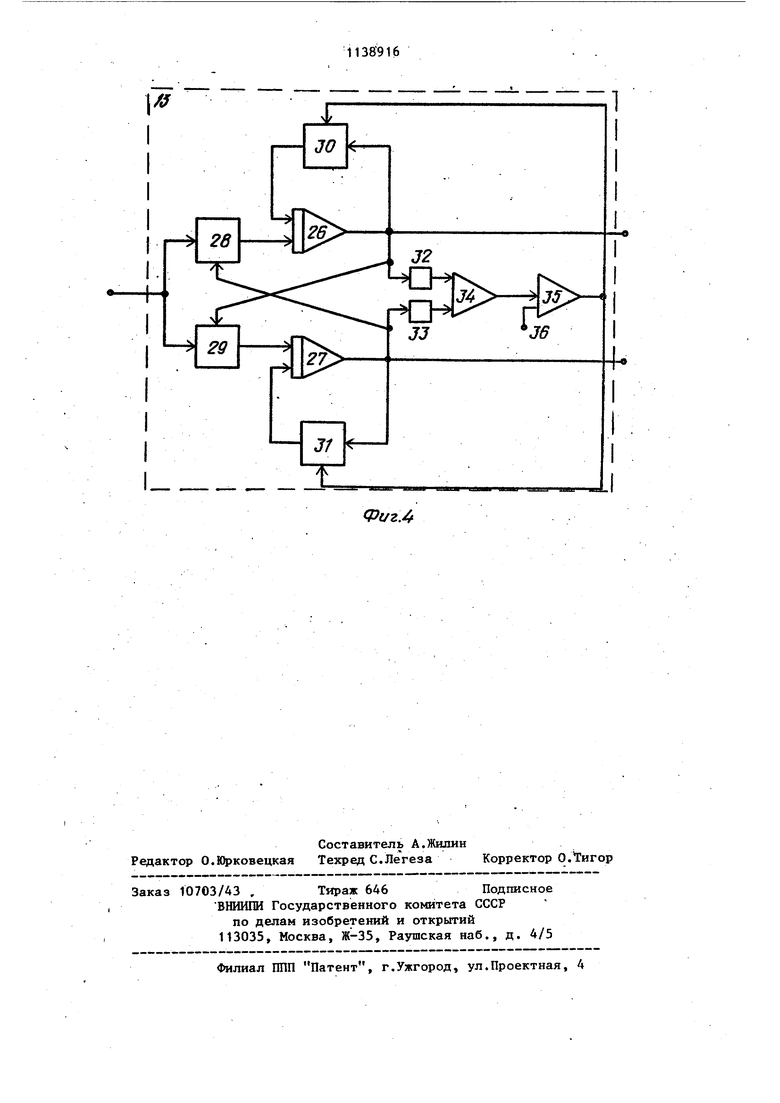
Изобретение относится к электротехнике, а именно к частотно-управляемым электроприводам на основе синхронных машин, и может быть использовано в приводах компрессоров, вентиляционных установок, станков для металлообработки, а также для управления режимами работы синхронных генераторов. Известен частотно-управляемый син хронный электропривод, содержащий синхронную электрическую машину с фазными обмотками на статоре и обмот кой возбужценря на роторе, преобразо ватель частоты, выходы которого под ключены к фазным обмоткам статора, датчик положения, установленньм :на роторе синхронной электрической маши ны и подключенный к системе управления преобразователем частоты 11Т . Недостатком частотно-упраадяе.могб синхронного электропривода является сложность системы управления и низкая точность регулирования скорости. Наиболее близким к изобретению техническим решением является частот но-управляемый синхронньй электропри вод, содержащий синхронную машину с фазными обмотками на статоре и обмот кой возбуждения на роторе, тиристорный преобразователь частоты, выходы которого связаны с фазными обмотками на статоре, а управляющие входы подключены к выходам-системы управления тиристорным преобразователем частоты, входы которой подключены к выходу блока задания скорости и вьпсодам датчика положения, установленного на роторе синхронной электрической машины 2 . Недостатком известного частотноуправляемого синхронного электропривода является низкая точность регулирования в широком диапазоне скоростей. Цель изобретения - повьшхение точности регулирования скорости в частотно-управляемом синхронном электроприводе. Указанная цель достигается тем, что в частотно-управляемый синхронный электропривод, содержащий синкронную электрическую машину с фазными обмотками на статоре и обмоткой возбуждения на роторе, первый тиристор ный преобразователь частоты, выходы которого связаны с фазными обмотками на статоре, а управляющие входы подключены к выходам первой системы управления тиристорным преобразователем частоты, входы которой подключены к выходу блока задания скорости и выходам датчика положения, установленного на роторесинхронной электрической машины, введены второй 311 тиристорнын преобразователь частоты и вторая система управления тиристор ным преобразователем частоты, а каждал фазная обмотка на статоре синхро ной электрической машины составлена из групп катушек, включенных в мостовую схему, причем первые диат тональные выводы мостовой схемы подключены к выходам первого тиристорного преобразователя частоты, вторые диагональные выводы мостовой схемы к выходам второго тиристорного преоб разователя частоты, управляющие входы которого подключены к выходам вто рой системы управления тиристорным преобразователем частоты, первый вхо которой подключен к выходу блока задания скорости, а два других входа к выходам датчика положения. Кроме того, вторая система управления тиристорным преобразователем частоты содержит два блока преобразо вания координат с двумя параьш фазных входов в каждом, векторный фильт ;С парой фазных входов, парой iфазных выходов и выходом по час тоте вращения, генератор двухфазкого напряжения с управляющим входом и элемент сравнения, первый вход которого образует первый вход второй системы управления тиристорным пре-. образователем частоты, причем второй вход элемента сравнения подключен к выходу по частоте вращения векторного фильтра 5 пара фазных входов которого подключена к выходам первого блока преобразования координат, а пара фазных выходов - к первой паре фазных входов второго блока преобразования координат, пофазно объеди- . ненные между собой первые и вторые входы обеих пар фазных входов перво7 Го блока преобразования координат образуют соответственно два других входа второй системы управления тиристорным преобразователем частоты, выход элемента сравнения подключен к управляющему входу генератора , двухфазного напряжения, соединенного выходами с второй парой фазных входов второго блока преобразования координат, выходы которого образуют выходы второй системы управления тиристорным преобразователем частоты. На фиг. 1 представлена функциональная схема частотно-управляемого синхронного электропривода; на фиг,2 схема блока преобразования координат 4 на фиг. 3 - схема векторного фильтра; на фиг.,4 - схема генератора двухфазного напряжения. Электропривод содержит синхронную электрическую машину 1 (фиг. 1) с фазными обмотками 2 на статоре и обмоткой 3 возбз ждения на роторе, первый тиристорный преобразователь 4 частоты,выходы которого связаны с фазными обмотками 2 на статоре, а управляющие входы подключены к выходам первой системы 5 управления тиристорным преобразователем частоты, входы которой подключены к .выходу -. блока 6 задания скорости и выходам датчика 7 положения, установленного на роторе синхронной электрической машины 1. В частотно-управляемый синхронный электропривод введены второй тиристорный преобразователь 8 частоты и вторая система 9 управления тиристорным преобразователем частоты, а каждая фазная обмотка 2 на статоре синхронной электрической машины 1 составлена из четырех групп катушек, включенньрс в мостовую схему, при этом первые диагональные выводы мостовой схемы подключены к выходам первого тиристорного преобразователя 4 частоты, вторые диагональные выводы мостовой схемы подключены к выходам второго тиристорного преобразователя 8 частоты, управляющие входы которого подключены к выходам второй . системы 9 управления тиристорным пре образователем частоты, первый вход которой подключен к выходу блока 6 задания скорости, а два других вхо-. да - к выходам датчика 7 положения. Вторая система 9 управления тиристорным преобра.зователем частоты содержит два блока 10 и 11 преобразования кочординат с дву5Ш парами фазных Влодсз в каждом, векторный фильтр 12с парой фазных входов, парой фазных выходов и выходом по частоте вращения, генератор 13 двухфазного напряжения с управляющим входом, и элемен1 14 сравнения, первый вход которого образует первый вход второй системы 9 управления тиристорным преобразователем частоты, причем второй вход элемента 14 сравнения подключен к выходу по частоте векторного фильтра 12, пара фазных входов которого подключена к выходам первого блока 10 преобразования координат, а пара фаз51ных выходов - к первой паре фазных входо второго бЛока 11 преобразования, коорди 1нат,,пофазно объелгненНые между собой первые и вторые иходы обеих пар входов первого блока 10 преобразования координат, образукЛ- соответственно два других входа второй системы 9 управления тиристорным преобразователем частоты, выход элемента 14 сравнения подключен к управляющему входу генератора 13 двухфазного напряжения, соединенного выходами с второй парой фазных входов второго блока 11 преобразования координат, выходь которого образуют выходы второй системы 9 управления тиристорным преобразователем частоты. Блоки 10 и 11 преобразования коор динат содержат умножители 15-18 (фиг. 2) и сумматоры 19 и 20. Объеди ненные между собой первые входы умно жителей 15 и 18 и объединенные между собой первые входы умножителей 16 и 17 образуют первую пару входов бло ков 10 и 11 преобразования координат. Объединенные между собой вторые входы умножителе. 15 и 16 и объединенные между собой вторые входы умно жителей 17 и 18 образуют вторую пару входов блоков 10 и 11 преобразования координат. Выходы умножителей 15 и17 подключены к входам сумматора 19, а выходы умножителей 16 и 18 - к вхо дам сумматора 20, при этом выходы сумма.торов 19 и 20 образуют выходы блоков 10 и 11 преобразования крор- . динат. Векторный фильтр 12 содержит двух фазный генератор 21 (фиг, 3) регулятор 22, сумматор 23 и. умножители 24 и 25, выходы которых образуют пару фазных входов векторного фильтра 12. Выходы умножителей 24 и 25 подключены к входам сумматора 23, соеди ненного выходом с входом регулятора 22. Выход регулятора 22 подключен к управляющему входу двухфазного генератора 21, выходы которого подключены к cooтвeтcтвyюпfl м вторым входам умножителей 24 и 25 и образуют пару фазных выходов векторного фильтра 12 Выход регулятора 22 образует выход по частоте векторного фильтра 12. Генератор 13 двухфазного напряжения содержит интеграторы 26 и 27 (фиг. 4), умножители 28-31, нелинейные преобразователи 32 и 33 с квадратичной выходной зависимостью, сум16матор 34, элемент 35 сравнения и источник 36 эталонного сигнала. Объединенные между собой первые входь умножителей 28 и 29 образуют управляющий вход генератора двухфазного напряжения. Выходы умножителей 28 и 2 подключены к первым входам ин- теграторов 26 и 27 соответственно. Выход интегратора 26, образующий один из выходов генератора 13 двухфазного напряжения, подключен к объединенным между собой второму входу умножителя 29, первому входу умножителя 30 и входу нелинейного , преобразователя 32. Выход интегратора 27, образующий другой выход генератора 13 двухфазного напряжения, подключен к объединенным между собой второму ВХОДУ умножителя 28, первому входу умножителя 31 и входу нелинейного преобразователя 33. Выходы нелинейных преобразователей 32 и Зз подключены к входам сумматора 34, выход которого подключен к одному из входов элемента 35 сравнения, соединенного другим входом с источником 36 эталонного сигнала. Выход элемента 35 сравнения соединен с вто рыми входами умножителей 30 и 31, выходы которых подключены к вторым входам интеграторов 26 и 27 соответственно. Электропривод работает следующим образом. В исходном состоянии обмотки 2 на статоре синхронной электрической машины 1 обесточены, а по обмотке 3 возбуждения протекает ток. Выходной сигнал блока 6 задания скорости, поступающий на вход первой системы 5 управления, определяет амплитуду и частоту выходного напряжения первого тиристорного преобразователя 4 частоты. Фазные обмотки 2 на статоре выполнены в виде многоскоростных обмоток совмещенного типа, при этом каждая из фазных обмоток составлена из четырех групп катушек, включенных в мостовую схему. Наприер, в фазе А первые диагональные выводы аа мостовой схемы соответстуют числу пар полюсов , а вторые иагональные выводы бб мостовой схеы - числу пар полюсов . Ток, протекаю1- ий через выводы бб аждой из фаз А, В и С от первого тиисторного преобразователя 4 частоы, взаимодействует с обмоткой 3 возбуждения, определяя первую скорость вращения ротора электрической машины 1, работающей в этом случае в син хронном режиме. Фазы токов в обмотках 2 статора определяются при этом датчиком 7 положения, связанным выхо дами с первой системой 5 управления тиристорным преобразователем 4 частоты. - Одновременно выводы аа каждой из фаз А, В и С подключены к выходам второго тиристорного преобразовате:ля 8 частоты. При этом токи, протекающие па в;ыводам аа и бб/, не взаимодействуют один с /другим в силу свойств обмотки совмещенного типа. .. На входы второй системы 9 управления тиристорного преобразователя 8 частоты поступают сигналы с выхода блока 6 задания скорости и выходов .датчика 7 положения. В блоке 10 преобразования координат осуществляется согласование частот токов, питающих обмотки 2 статог,I ра по выводам аа . и бб и соответствующих разным числам пар полюсов р и PJ (разным скоростям вращения) ПРи этом на выходах блока 10 преобра зования координат формируются сигналы, соответствующие удвоенной частотеo() ,о17Г2-и,,„-ид,,, где и,., и ) сигналы на выходах датчика 7 положения В векторном фильтре 12 осуществля ется нормирование по амплитуде входной двухфазной системы напряжений и./ , и фильтрация содержащихся в них помех. Кроме того, на выходе регулятора 22 (фиг. 3) формируется сигнал по действительной частоте.вра щения, который сравнивается в злейенте 14 сравнения с сигналом, поступаю щим с выхода блока 6 задания скорост Сигнал ошибки по скорости с выход элемента 14 сравнения поступает на управляющий вход генератора 13 двухфазногр напряжения, на выходе которого формируется двухфазная система напряжений с частотой, пропорциональной ошибке по скорости вращения. На выходе блока 11 преобразования координат получают сигналы (1и Г ПЫ 131«Г «( :l HCirl mil- m.nUnU)), где Uii(, и (j сигналы на выходах генератора 13 двухфазного напряжения. Сигналы и,/,-) и ) являются уп- . равляющими для второго тиристорного преобразователя 8 частоты. При этом ток, протекающий через выводы аа каждой из фаз А, В и С от второго тиристорного преобразователя 8 частоты, взаимодействует с короткозамкнутой обмоткой на роторе и определяет вторую скорость вращения ротора электрической машины 1, работающей в этом случае в асинхронном режиме. Знак и величина ошибки по скороети задают величину абсолютного скольжeнияj причем отставание действительной скорости от заданной (ошибка положительна) задает положительное скольжение, и асинхронный момент действу4т как разгоняющий (асинхронная машина в двигательном режиме), в противном случае - тормозяпщй (генераторный режим). Таким образом, за счет введения в частотно-управляемый синхронный электропривод второго тиристорного преоб- . разователя частоты с системой управления и вьтолнения фазных обмоток на статоре в виде многоскоростных обмоток совмещенного типа обеспечивается как основной синхронный режим работы электрической машины, так и асинхронный режим ее работы, осуществляемый по разности действительной и заданной скоростей вращения, благодаря чему повышается точность регулирования скорости в сравнении с известным техническим решением.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ЭЛЕКТРОПРИВОД С ВЕНТИЛЬНЫМ ДВИГАТЕЛЕМ | 0 |
|
SU304665A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Железобетонный фасонный камень для кладки стен | 1920 |
|
SU45A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| : | |||
