I
Изобретение относится к машиностроению и может быть использовано рля механизации подъемнотранспортных и погрузочных работ.
Известен манипулятор, содержащий задающий орган, исполнительный орган, вьшолненный в виде параллелограммного механизма, каретки вертикального и горизонтального перемещения которого смонтированы на направляющих, установленных на корпусе, и привод вертикального перемещения, содержащий двигатель и передаточный механизм 1 .
Недостатком известного устройства является возможность его поломки при встрече на пути препятствий, что существенно снижает надежность данного устройства.
Цель изобретения - повышение надежности устройства.
Цель достигается тем, что передаточный механизм манипулятора выполнен в виде трособлочной системы и
траверсы, содержащей подпружиненный ступенчатый шток, который связан с кареткой вертикального перемещения, а трособлочная система выполнена с незамкнутым гибким элементом.
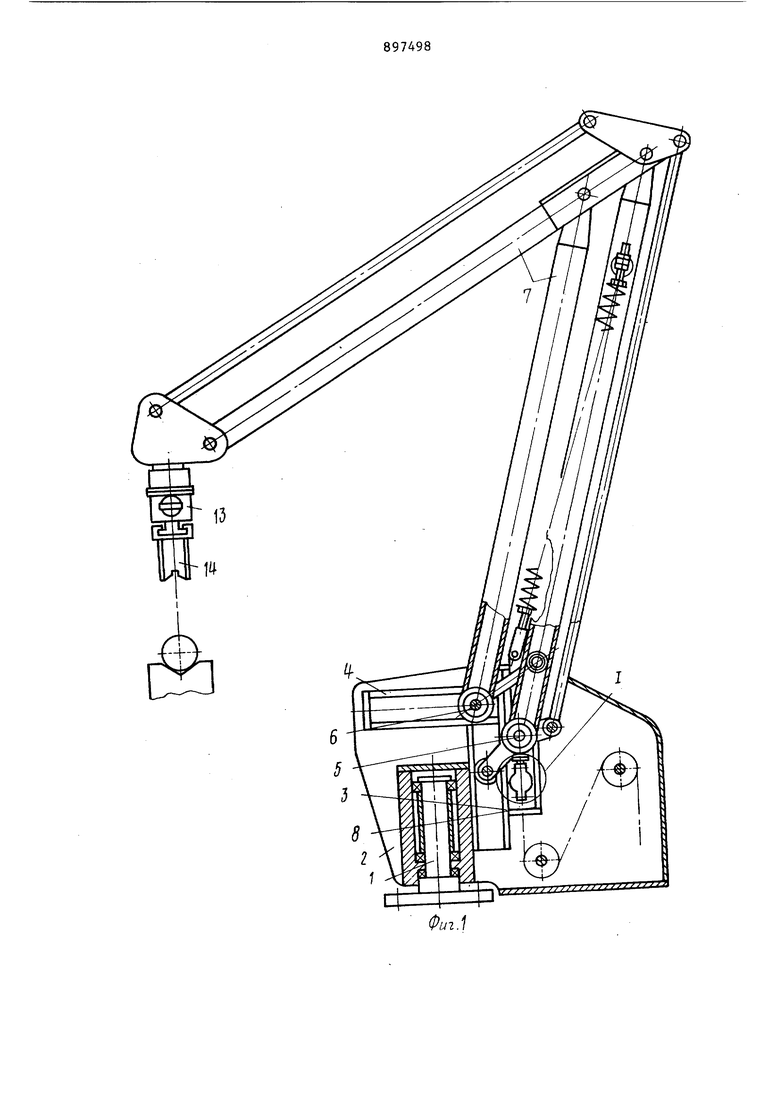
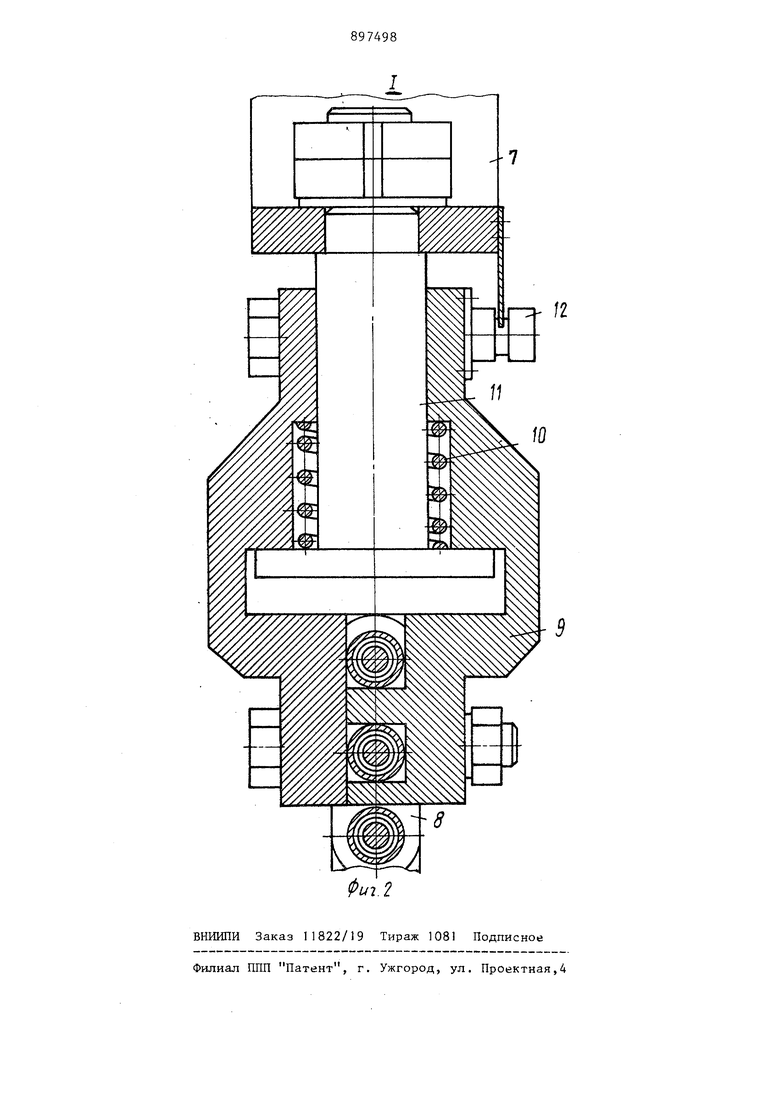
На фиг. 1 изображен манипулятор, общий вид-, на фиг. 2 - узел I на фиг.1.
Манипулятор содержит установленный на опорном валу 1 корпус 2 с за10крепленными на нем вертикальными 3 и горизонтальными 4 направляющими. В направляющих, посредством кареток 5 и 6, снабженных роликами, установ лен исполнительный орган 7. Привод
ts (не показан) соединен с исполнительным органом 7 передаточным механизмом. Передаточный механизм содержит гибкий элемент 8, связанный с приводом и закрепленный на траверсе 9,
20 в которой установлены пружины 10 и ступенчатый шток 11, жестко связанный с исполнительным органом 7. Исполнительный орган 7 и траверса 9 оснащены конечным выключателем 12. Задающий орган 13, на котором закреплен схват 14, смонтирован на исполнительном органе. Манипулятор работает следующим образом. Задающим органом 13 оператор включает привод, и каретка 5 с рол ками перемещается вверх, при этом схват 14, связанный с исполнительным органом 7, перемещается плавно вниз, подходя к перегружаемой детали. В момент соприкосновения схв та 14 с деталью, исполнительный орган 7 со схватом 14 останавливается и перемещание каретки 5 прекр щается. При этом ступенчатый щток 1, жестко связанный с исполнитель ным органом 7, также останавливает ся , а траверса 9 под действием пружины 10, подтягивая гибкий элемент 8, продолжает перемещаться вверх. При достижении определенног зазора между траверсой 9 и исполнительным органом 7 срабатывает ко нечный выктйочатель 12 и происходит отключение привода. Схват плотно (Установлен на детали и захватывает ее, Затем оператор переключает привод на подъем схвата 14 вверх и транспортирует деталь на другую позицию. Работа манипулятора при опускании детали происходит аналогично работе при установке схвата на деталь, Поворот вокруг вала 1 и горизон тальное перемещение исполнительног органа 7 со схватом 14 осуществляется вручную. 84 Таким образом, при установке схвата на деталь, или при опускании детали на позицию обработки в манипуляторе, отключение привода происходит не от задающего органа рабочим, а автоматически за счет срабатывания конечного выключателя, которым оснащен передаточный механизм, что позволяет значительно расширить еГо технологические возможности за счет использования для транспортировки хрупких И легкодеформируемых деталей схватов, требующих плотной установки на деталь сверху, например магнитных или вакуумных. Формула изобретения Манипулятор, содержащий задающий орган, исполнительный орган, выполненный в виде параллелограммно-го механизма, каретки вертикального и горизонтального перемещения которого смонтированы в направляющих, установленных на корпусе, и привод вертикального перемещения, содержащий двигатель и передаточный механизм, о тличающийся тем, что, с целью повышения надежности, передаточный механизм выполнен в виде трособлочной системы и траверсы, содержащей подпружиненный ступенчатый шток, который связан с кареткой вертикального перемещения, а трособлочная система выполнена с незамкнутым гибким элементом. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство CCCR №643320, кл. В 25 J 11/00, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автозагрузчик | 1980 |
|
SU1057269A1 |
| Автоматический манипулятор | 1983 |
|
SU1119836A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
| Переналаживаемый комплекс для штамповки | 1990 |
|
SU1801684A1 |
| Манипулятор | 1982 |
|
SU1073086A1 |
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор | 1983 |
|
SU1122502A1 |
| Роботизированный сборочный комлекс | 1988 |
|
SU1662812A1 |
| Манипулятор | 1980 |
|
SU921847A1 |