Изобретение относится к кранестроению, а именно к противоугонным рельсовым захватам.
Известен противоугонный захват, содержащий корпус с башмаками, в наклонных направляющих которых размещены с возможностью перемещения вдоль оси рельса подпружиненные захватные лапы, связанные с приводом их фиксации 1.
Однако известный захват характеризуется недостаточной надежностью работы, вследствие невозможности обеспечения равномерного двустороннего зажатия головки рельса при отклонении оси последнего в горизонтальной плоскости даже в пределах монтажного допуска. Это объясняется отсутствием возможности самоустановки башмаков с захватными лапами в горизонтальной плоскости в направлении, перпендикулярном оси рельса. Кроме того, привод фиксации захватных лап выполнен в виде двигателя возвратно-поступательного действия, связанного с захватными лапами посредством рычажной системы. Необходимость обеспечения выигрыша, в силе и одновременно достаточного хода захватных лап ведет к увеличению вертикального габарита устройства.
Цель изобретения - повышение надежности работы устройства путем обеспечения равномерного двустороннего зажатия головки рельса и уменьшение габаритов устройства.
Поставленная цель достигается тем, что в противоугонном захвате для кранов, содержащем корпус и башмаки, в наклонных направляющих которых размещены с возможностью перемещения вдоль оси рельса подпружиненные захватные лапы, связанные приводом их фиксации, башмаки жестко установлены на каретке, шарнирно связанной с корпусом посредством цилиндрической направляющей, жестко, закрепленной в корпусе параллельно оси рельса, при этом на каретке установлены обводные блоки, а захватные лапы связаны с приводом их фиксации гибкими связями, направленными вдоль оси рельса на обводные блоки, причем каретка в направлении оси рельса выполнена подпружиненной, а в корпусе размещены упоры с возможностью их взаимодействия с торцами каретки.
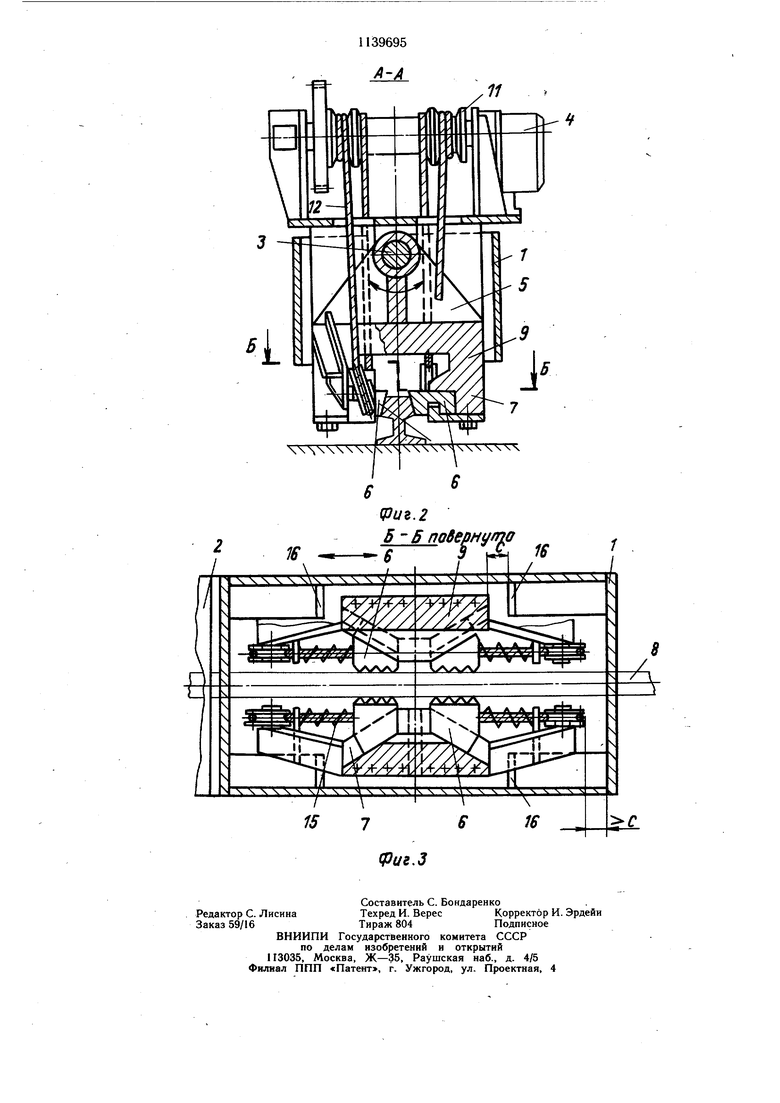
На фиг. 1 схематически представлен предлагаемый противоугонный захват, общий вид; на фиг. 2 - сечение А-А на фиг. 1; на фиг. 3 - сечение Б-Б на фиг. 2.
Противоугонный захват для кранов содержит корпус 1, жестко закрепленный на
ходовой балке 2 крана. С корпусом 1 жестко связаны цилиндрическая направляющая 3 и привод 4. На направляющей 3 размещена каретка 5 с захватными лапами 6, размещенными в наклонных направляющих башмаков 7, взаимодействующих с боковой поверхностью рельса 8 и образующих П-образную скобу 9, жестко связанную с кареткой 5. Между торцами каретки 5 и стенками корпуса I размещены пружины 10. Захватные лапы 6 соединены с барабаном 11 привода 4 гибкими связями 12, направленными вдоль оси рельса 8 на обводные блоки 13, установленные на кронштейнах 14. Между последними и захватными лапами 6 размещены пружины 15. На внутренних стенках корпуса 1 находятся упоры 16 с возможностью взаимодействия с торцами каретки 5.
Противоугонный захват для кранов работает следующим образом.
Для обеспечения возможности перемещения крана вдоль рельса включается привод 4, и гибкие связи 12, сжимая пружины 15 и наматываясь на барабан 11, отводят захватные лапы 6, освобождая головку рельса 8. Фиксация крана на рельсе осуществляется путем отключения привода 4. При этом под действием пружин 15 захватные лапы 6, перемещаясь по наклонным направляющим башмаков 7 вдоль рельса и одновременно в направлении, перпендикулярном его оси, зажимают головку рельса 8. Размещение
0 захватных лап 6 в,наклонных направляющих позволяет использовать динамические нагрузки (например, ветровые) для увеличения усилия зажатия рельса. При этом, в зависимости от направления действия нагрузки, в работу вступает одна из пар захватных лап 6, а пружины 10 играют роль демпфирующих элементов. Перемещение каретки 5 вдоль направляющей 3 ограничивается упором 16. В случае отклонения оси рельса в пределах монтажного допуска равномерное двустороннее обжатие головки рельса 8 обеспечивается вследствие поворота каретки 5, а вместе с ней и башмаков 7 с захватными лапами 6 вокруг направляющей 3. Некоторое вертикальное перемещение захватных лап 6, обуславливаемое движением каретки 5 по дуге, практически не оказывает заметного влияния на прилегание лап к головке рельса, поскольку горизонтальная составляющая перемещения каретки значительно больше вертикальной.
0 Использование изобретения позволяет повысить надежность фиксации кранов на стоянке и уменьшить габариты удерживающего устройства.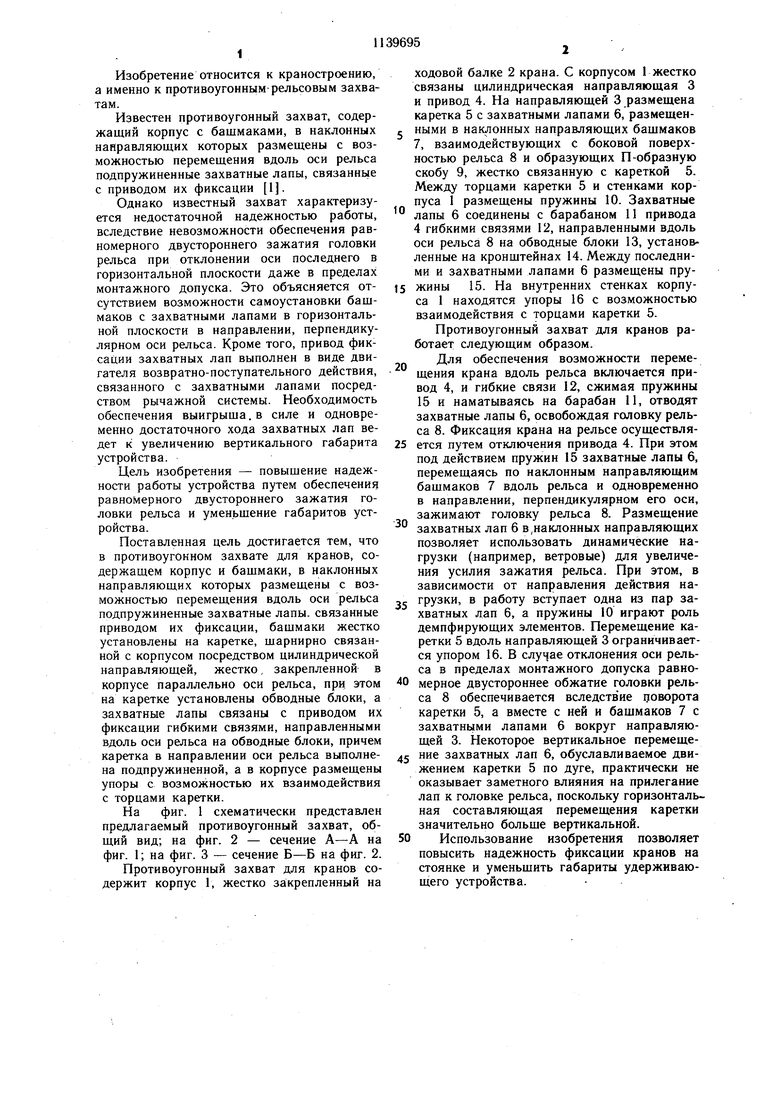
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоугонный захват для кранов | 1981 |
|
SU977363A1 |
| Противоугонный захват для кранов | 1982 |
|
SU1074807A1 |
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Противоугонное устройство дляКРАНА | 1979 |
|
SU839996A1 |
| Противоугонное устройство крана | 1981 |
|
SU965956A1 |
| Противоугонный рельсовый захват крана | 1990 |
|
SU1773850A1 |
| ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ | 2000 |
|
RU2225828C2 |
| ПРОТИВОУГОННОЕ УСТРОЙСТВО для КРАНОВ, ! Т' \:;^ЧЕс::л:^ | 1965 |
|
SU173901A1 |
| Противоугонный захват для кранов | 1987 |
|
SU1419051A1 |
| Рельсовый тормоз | 1990 |
|
SU1763274A1 |
ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ, содержащий корпус и башмаки, в наклонных направляющих которых размещены с возможностью перемещения вдоль оси рельса подпружиненные захватные лапы, связанные с приводом их фиксации, отличающийся тем, что, с целью повыщения надежности работы устройства путем обеспечения равномерного двустороннего зажатия головки рельса и уменьщения габаритов устройства, башмаки жестко установлены на каретке, щарнирно связанной с корпусом посредством цилиндрической направляющей, жестко закрепленной в корпусе параллельно оси рельса, при этом на каретке установлены обводные блоки, а захватные лапы связаны с приводом их фиксации гибкими связями, направленными вдоль оси рельса на обводные блоки, причем каретка в направлении оси рельса выполнена подпружиненной, а в корпусе размещены упоры с возможностью их взаимодействия с торцами каретки. i ОО ;о о: ;о ел
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| АНТИОБЛЕДЕНИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ КРЫШ | 2010 |
|
RU2441122C2 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
