11;ui6p..:reHne относится к подъемно-транtliopTHOMv машиностроению, в частности к противоугонным захватам для кранов.
Наиболее близким к изобретению техническим решением является противоугонный захват для кранов, содержащий корпус, захватные лапы для взаимодействия с головкой рельса, распорное приспособление, связанное посредством тяги с механизмом подъема, и трехплечий угловой рычаг, смонтированный на оси между захватными лапами 1.
Недостатком известного захвата является сложность конструкции, что приводит к ненадежности его работы.
Цель изобретения - повышение надежности работы.
Для достижения цели противоугонный захват для кранов, содержащий корпус, , захватные лапы для взаимодействия с головкой рельса, распорное приспособление, связанное посредством тяги с механизмом подъема, и трехплечий угловой рычаг, смонтированный на оси между захватными лапами, снабжен подпружиненным относительно корпуса коромыслом, связанным посредством шарнирных тяг с захватными лапами, выполненными в виде двуплечих рычагов, при этом распорное приспособление содержит подпружиненную относительно упомяпутого коромысла балку, взаимодействующую со свободными концами упомянутых рычагов.
Кроме того, захват снабжен клиньями, шарнирно смонтированнь ми на свободных концах захватны.х рычагов с возмож ью из.менения угла распора.
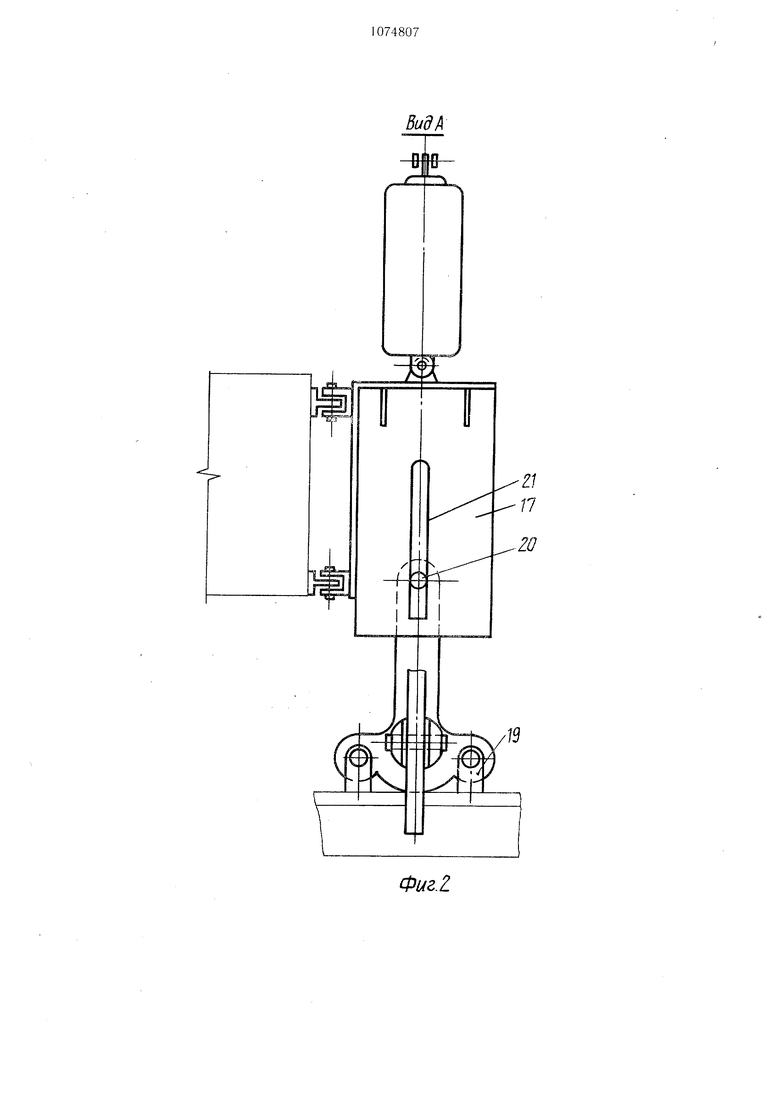
На фиг. 1 показан противоугонный захват, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - узел I на фиг. 1.
Противоугонный захват из захватны.к лап 1, ось вращения 2 которых находится на нижней оси 3, соединяющей лапы 1 с трехплечим рычагом 4, нижнего коромысла 5, к которому крепится один конец тягового каната 6, а второй конец закреплен на траверсе 7, соединяющей гидротолкатели 8 механизма подъема. Захватные лапы 1 в верхней части имеют закрепленные на оси 9 клиновые упорные плоскости 10, которые с помощью винтов 11 имеют возможность изменять угол наклона. С помощью шарнирных тяг 12 захватные лапы 1 соединены с верхним коромыслом 13, имеющем в верхней части стойки 14 определенной величины и уноры 15.
Между нижним коромыслом 5, представляющем собой распорное приспособление, и верхним коромыслом 13 установлены 3i помогательпые пружины 16, а между корпусом захвата 17 и верхним коромыслом 13 установлена главная пружина 18. По краям трехплечего рычага 4 имеются опорные башмаки 19, верхняя ось 20 рычага перемещается по направляющим пазам 21 корпуса захвата 17.
Захват работает следуюгцим образом.
При включении электропитания крана включаются гидротолкатели 8, которые через траверсу 7 с помощью тягового каната 6 поднимают нижнее коромысло 5. сжимая при этом вспомогательные пружины 16. Так как усилие вспомогательных пружин 16 меньше усилия главной пружины 18, нижнее коромысло 5 перемещается до упора в верхние стойки 14. При дальнейшем подъеме поднимается верхнее коромысло 13, сжимая главную пружину 18, а п:арнирные тяги 12 поворачивают лапы 1 вокруг оси 2 до упора в упоры 15, при этом лапы выходят из-под головки рельса и конечный подъем осуществляется одновременно с лапами 1 и трехплечим рычагом 4 до достижения гарантированного зазора между рельсом и захватными лапами. В таком положепии шдротолкатели удерживают захват при работе крана.
При размыкании цепи питания гидротолкателей 8 трехплечий рычаг 4 вместе с лапами 1, нижним 5 и верхним i3 коромыслами под собственным весом
и усилием главной пружины опускаются до соприкосповения трехплечего рычага рельссом, затем иод действием главной пружины 18 лапы 1 поворачиваются и подводятся под головку рельса до упора во внутреннюю поверхность головки ре:1ьса. Затем под действием вспомогате.льных пружин 16 происходит onycKaime нижнего коромысла и дальнейшее расклинивание лап 1 по клиновым упорным плоскостям И). Происходит дополните,1ьпое прижатие лап к рельсу и стопорепие лап от поворота. Захват готов к восприятию силы ветра.
Наличие захватных лап в виде двуплечего рычага и подпружиненпого iin/KHero коромысла, представляюпгего собой распорное приспособление, и поворотных клиновых уноров позволяет увеличить в несколько раз силу прижатия лап к рельсу при относительно небольших уси;п1ях пружин, что требует небольшого подъемного усил)я и позволяет примепить гидротолкатели с небольшим усилием, за счет чего упрощается конструкция захвата и уменьшается его металлоемкость.
Вид/
т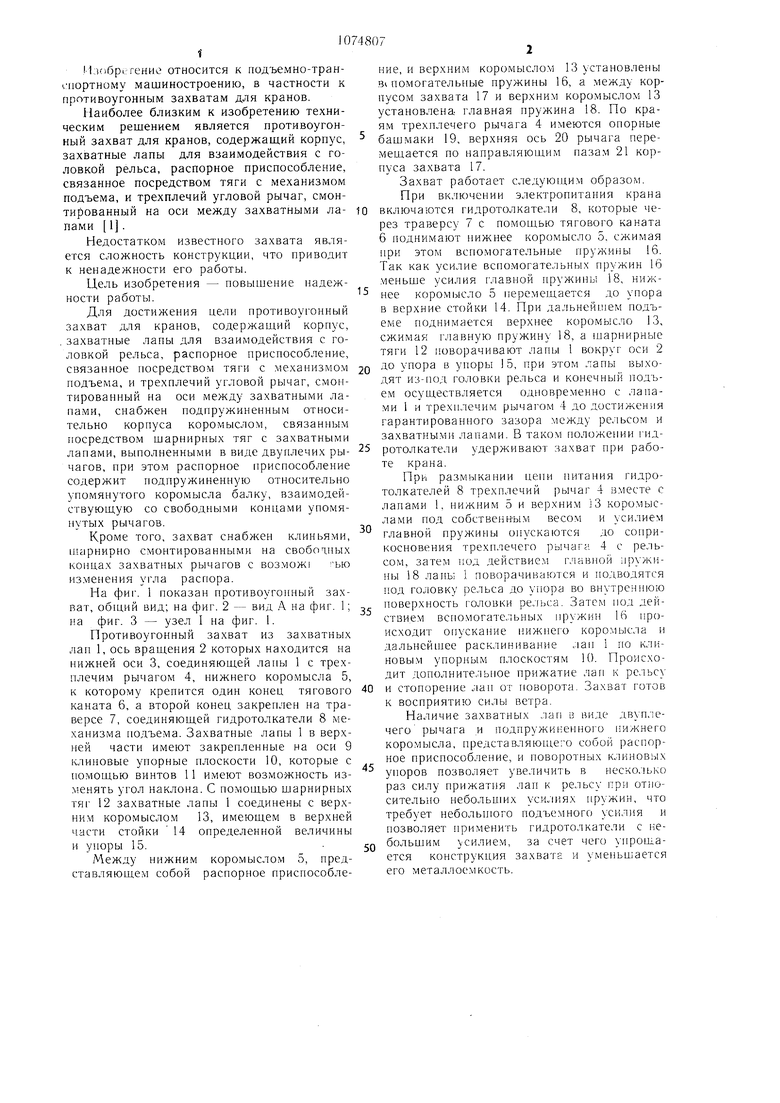
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоугонный рельсовый захват крана | 1990 |
|
SU1773850A1 |
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Противоугонный захват для кранов | 1981 |
|
SU977363A1 |
| Противоугонное устройство крана | 1981 |
|
SU965956A1 |
| Противоугонный захват для кранов | 1987 |
|
SU1419051A1 |
| Противоугонное устройство крана | 1985 |
|
SU1298180A1 |
| Противоугонное устройство крана | 1978 |
|
SU771000A1 |
| Захватное устройство для труб | 1986 |
|
SU1425165A1 |
| Противоугонный рельсовый захват крана | 1981 |
|
SU984979A1 |
| Противоугонное устройство | 1980 |
|
SU935444A1 |
1. ПРОТИВОУГОННЫЙ ЗАХВАТ ДЛЯ КРАНОВ, содержащий корпус, захватные лапы для взаимодействия с головкой рельса, распорное приспособление, связанное посредством тяги с механиамом подъема, и трехплечий угловой рычаг, смонтированный на оси между захватными лапами, отличающийся тем, что, с целью повышения надежности в работе, он снабжен подпружиненным относительно корпуса коромыслом, связанным посредством шарнирных тяг с захватными лапами, выполненными в виде двуплечих рычагов, при этом распорное приспособление содержит подпружиненную относительно коромысла балку, взаимодействующую со свободными концами упомянутых рычагов. 2. Захват по п. 1, отличающийся тем, что он снабжен клиньями, шарнирно смонтированными на свободных концах захватных рычагов с возможностью изменения угла распора. i (Л /7 4 ОО
Фиг2
.З
ю
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Противоугонный захват для кранов | 1972 |
|
SU446462A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
