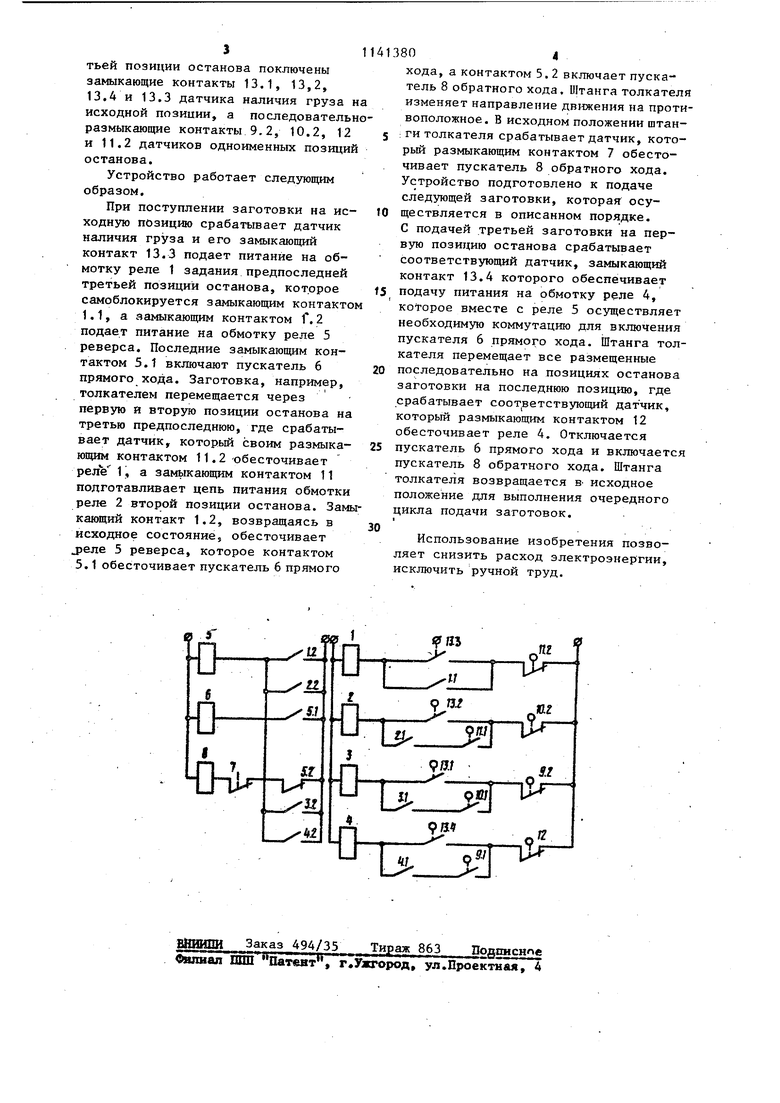
Изобретение относится к области промышленного транспорта и может быть использовано для управления толкателями в системах формирования накатов, транспортирования и штабелирования различных грузов, в частности прямоугольных заготовок, преимущественно слябов. Известно устройство для управления механизмом подачи грузов, содержащее храповой механизм, програм мный диск, группу датчиков положени и неподвижное коллекторное кольцо с токопроводящими сегментами и t подвижным щеточным контактом, установленным на программном диске Г 13. Недостатками этого устройства являются небольшая производительность и низкая надежность. Наиболее близким к изобретению по технической сущности.и достигаемому результату является устройст для управления механизмом подачи груаов, преимущественно для пакетоформирующих машин, содержащее реле задания позиций останова, одни из замыкающих контактов которых включе в цепи питания их обмоток, а другие параллельно в цепь питания обмотки реле реверса, замыкающий контакт которого включен в цепь питания обмотки пускателя прямого хода, а размыкающий последовательно с размы кающим контактом датчика исходного положения механизма подачи - в цепь питания обмотки пускателя обратного ходаэ и датчики позиций останова с заья 1кающими контактами f 21. Однако известное устройство требует значительных затрат времени связанных с ручным управлением, что снижает его производительность. Цель изобретения - увеличение производительности. Цель достигается тем, что устройст во дщя управления механизмом подачи Грузов, преимущественно для пакетофо мирунщих машин, содержащее реле задания позиций останова, одни из замыкаю щих контактов которых включены в цепи ®|1тания их обмоток, а другие параллельно в цепь питания обмотки реле реверса, замыкающий контакт которого включен в цепь питания обмотки пускателя прямого хода, а размыкающий последовательно с размы кающим контактом датчика исходного положения механизма подачи - в цепь питания обмотки пускателя обратногохода, и датчики позиций останова с замыкающими контактами, снабжено датчиком наличия груза на исходной позиции с замыкающими контактами и датчиком позиции группового останова с размыкающим контактом, а датчики позиций останова выполнены с размыкающими контактами, причем последовательно замыкающему контакту реле задания предыдущей позиции останова, исключая последнюю, включен замыкающий контакт датчика последующей позиции останова, замыкающему контакту реле задания позиции группового останова - замыкающий контакт датчика первой позиции останова, параллельно им подключены замыкающие, контакты датчика наличия груза на исходной позиции, а последовательно {Размыкающие контакты датчиков одноименных позиций останова. На чертеже представлена электрическая схема устройства для управления механизмом подачи грузов, преимущественно для пакетоформирующих машин. Устройство содержит реле 1-4 задания позиций останова, замыкаю цие контакты 1.1-4.1 которых включены в цепи питания их обмоток, «а контакты 1.2-4,2 параллельно в цепь питания обмотки реле 5 реверса, Замьжающий 5.1 и размыкающий 5.2 контакты последнего включены в цепь питания соответственно обмотки пускателя 6 прямого .хода и последовательно с размыкающим контактом 7 датчика исходного положения механизма подачи - в цепь питания обмотки пускателя 8 обратного хода. Датчики позиций останова включают замыкающие и раз№1кающие контакты 9.1 и 9,2, 10.1 и 10.2, 11,1 и 11,2, а датчик последней позиции группового останова размыкающий контакт 12,. Последовательно замыкаюп1ему контакту 1.2(3.1) реле задания предыдущей позиции, например второй (первой), исключая третью, включен замыкающий контакт 11.1 (10„1) датчика последу ощей позиции останова - третьей (второй). Последовательно замыкающему контакту 4.1 реле задания последней четвертой позиции останова включен замыкающий контакт 9,1 датчика первой позиции останова, параллельно им и замыкающему контакту 1.1 реле чалания тре3
тьей позиции останова поключены замыкающие контакты 13.1, 13,2, 13.4 и 13.3 датчика наличия груза н исходной позиции, а последовательнразмыкающие контакты 9.2, 10.2, 12 и 11.2 датчиков одноименных позиций останова.
Устройство работает следзтощим образом.
При поступлении заготовки на исходную позицию срабатывает датчик наличия груза и его замыкающий контакт 13.3 подает питание на обмотку реле 1 задания предпоследней третьей позиций останова, которое самоблокируется замыкающим контакто 1.1, а замыкающим контактом 1. 2 подает питание на обмотку реле 5 реверса. Последние замыкающим контактом 5.1 включают пускатель 6 прямого хода. Заготовка, например, толкателем перемещается через первую и вторую позиции останова на третью предпоследнюю, где срабатывает датчик, который своим размыкающим контактом 11.2-обесточивает реле 1, а замьжающим контактом 11 подготавливает цепь питания обмотки реле 2 второй позиции останова. Замыкающий контакт 1.2, возвращаясь в исходное состояние, обесточивает jpene 5 реверса, которое контактом 5.1 обесточивает пускатель 6 прямого
13804
хода, а контактом 5. 2 включает пускатель 8 обратного хода. Штанга толкателя изменяет направление движения на противоположное. В исходном положении штан5 : ги толкателя срабатывает датчик, который размыкающим контактом 7 обесточивает пускатель 8 обратного хода. Устройство подготовлено к подаче следующей заготовки, которая осуO ществляется в описанном порядке. С подачей .третьей заготовки на первую позицию останова срабатывает соответствующий датчик, замыкающий контакт 13.4 которого обеспечивает
5 подачу питания на обмотку реле 4, которое вместе с реле 5 осуществляет необходимую коммутацию для включения пускателя 6 прямого хода. 111танга толкателя перемещает все размещенные
0 последовательно на позициях останова заготовки на последнюю позицию, где срабатывает соот ветствующий датчик, который размыкающим контактом 12 обесточивает реле 4. Отключается
5 пускатель 6 прямого хода и включается пускатель 8 обратного хода. Штанга толкателя возвращается в- исходное положение для выполнения очередного цикла подачи заготовок.
Использование изобретения позволяет снизить расход электроэнергии, исключить ручной труд.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1613410A2 |
| Устройство для автоматического выбора направления движения объекта | 1988 |
|
SU1509316A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Устройство для автоматической защиты калорифера от замораживания | 1987 |
|
SU1506239A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU875348A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1981 |
|
SU1171758A2 |
| Устройство для дистанционного управления раздаточной тележкой | 1988 |
|
SU1667015A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU949641A2 |
| Устройство для автоматического управления приводом передвижения передаточной тележки | 1988 |
|
SU1553478A1 |
| Устройство для управления электродвигателями транспортного средства | 1987 |
|
SU1512825A1 |
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ МЕХАНИЗМОМ ПОДАЧИ ГРУЗОВ, преиму|щественно для пакетоформирующих машин, содержащее реле задания позиций останова, одни из замыканлцих контактов которых включены в цепи питания их обмоток, а другие - параллельно в цепь питания обмотки реле реверса, ;звмыкашщий контакт которого включен в цепь питания обмотки пускателя прямого хода, а размыканиций последовательно с размыкающим контактом датчика исходного положения механиз ма подачи - в цепь питания обмотки пускателя обратного хода, и датчики . позиций останова с замыкающими контактами, отличающееся :тем, что, с целью увеличения производительности, оно снабжено датчиком наличия груза на исходной пози;ции с замыкающими контактами, а датчики позиций остай ва выполнены с размыкающими контактами, причем последовательно замыкающему контакту реле задания предыдущей позиции останова, исключая последнюю, включен ;замыкающий контакт датчика последующей позиции останова, замыкающему контакту реле задания позиции группового останова - замыкающий контакт (Л датчика первой позиции останова, параллельно им подключены замыкающие к Штакты датчика наличия груза на исходной позиции, а последовательно, -. размыкающие контакты датчиков одноименных позиций останова. :о эо
«0J.
9J.
-D
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление для надевания ремней на шкивы | 1926 |
|
SU4258A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для дистанционного управления реверсивным механизмом | 1980 |
|
SU875348A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
