3150
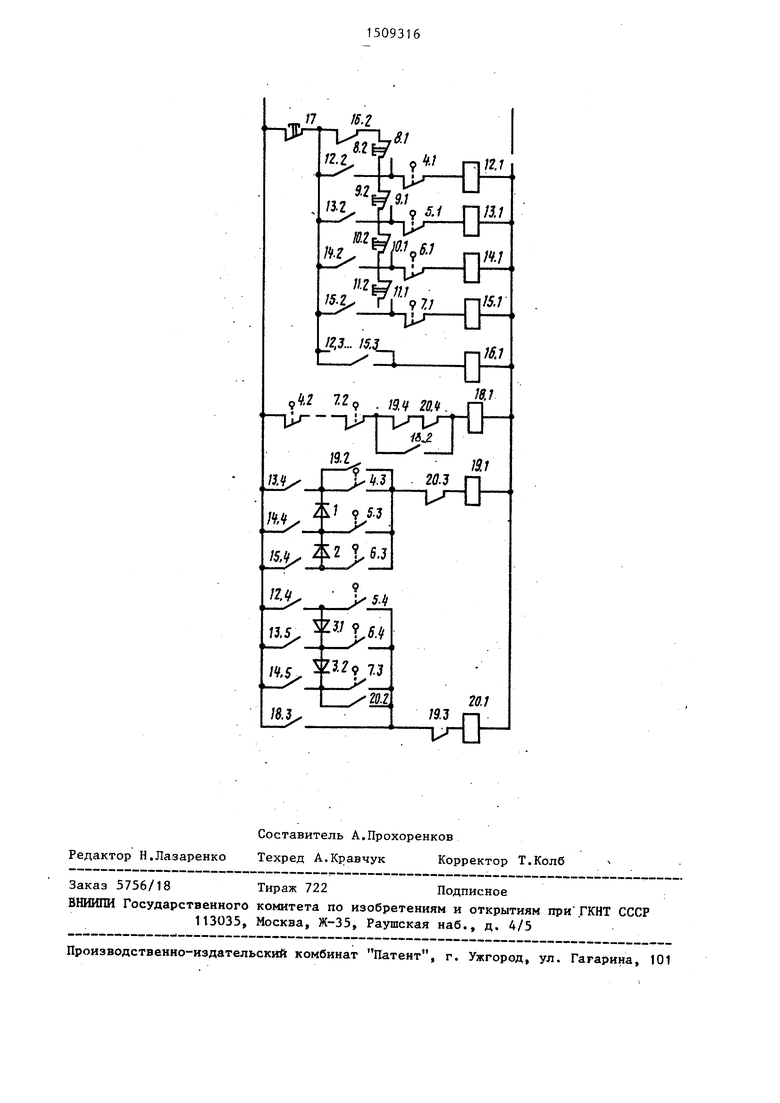
18.1и замыкающими контактами 18.2
и 18,3, пускатель движения вперед с обмоткой 19.1, замыкающим контактом
19.2и размыкаюпщми 19.3, 19.4, пус- катель движения назад с обмоткой 20.1, замыкающим контактом 20.2 и размыкаюгдами 20.3, 20.4.
В цепи питания обмоток 12.1...15. реле памяти адреса включены размы- кающий контакт 17 кнопки отмены адреса, соответствующие замыкающие контакты 12.2 - 15.2, параллельно которым через размыкающий контакт 16.2 реле запрета и последовательно соединенные размьжающие контакты
8.2- 11.2 предыду1чих кнопок задания адреса подключены замыкающие контакты 8.1 - 11.1 соответствующих кнопок задания адреса.
В цепь питания обмотки 16.1 реле запрета параллельно включены замыкающие контакты 12.3 - 15.3 реле памяти адреса.
В цепь питания обмотки 18.1 реле межпозиционного останова последовательно включены размыкающие контакты 4.2 - 7.2 датчиков положения объекта и 19.4 и 20.4 пускателей. Параллельно двум последним подключен за- мыкающий контакт 18.2 реле межпозиционного останова.
В цепь питания обмоток 19.1 и 20,1 пускателей движения вперед - назад через размыкающие контакты 20.3 и 19.3 соответственно включены jio- следовательно замыкающим контактам
4.3- 6.3 и 5.4, 6.4, 7.3 датчиков положения, установленных на последующих первой и предыдущей последней позициях адресования, соответственно замыкающие контакты 13.4 - 15.4 и 12.4, 13.5, 14.5 реле памяти адреса,
а через диоды 1.2 и 3.1, 3.2 - последующих и предыдущих. Параллельно замыкающим контактам 4.3 и 7.3 датчиков положения включены замыкающие контакты 19.2 и 20.2 пускателей движения вперед и назад соответственно. Б цепь питания.обмотки 20.1 пус
кателя движения назад включен замыкающий контакт 18.3 реле межпозиционного останова.
Устройство работает следующим образом.
Предположим, что объект находится на третьей позиции адресования. Раз- мыкаюсше контакты 6.1, 6.2 датчика положения объекта разомкнуты в цепях
0
0
5 0
5
0
j
0
5
обмотки 14.1 реле памяти адреса и .обмотки 18.1 реле межпозиционного останова, а замыкающие контакты 6.3 и 6.4 датчика замкнуты в цепях обмоток 19.1 и 20.1 пускателей.
Задание нового адреса, например второго, осухцествляется нажатием соответствующей кнопки, замыкающий контакт 9.1 которьш подает питание на обмотку 13,1. Реле памяти адреса срабатывает, самоблокируется замыкающим контактом 13.2 и замыкающим контактом 13.5 через замыкающий контакт 6.4 датчика положения объекта подает питание на обмотку 20.1 пус- .кателя движения назад. Пускатель срабатывает, самоблокируется замыкающим контактом 20.2 для автоматического завершения движения по указанному адресу. Объект перемещается в установленном направлении к второй позиции адресования. Включенное за-. мыкающим контактом 13.3 реле запрета размыкающим контактом 16.2 исключает задание другого адреса в процессе движения объекта.
Достигнув заданной позиции адресования, объект взаимодействует с датчиком положения, размыкающий контакт 5.1 которого обесточивает обмотку 13.1 реле памяти адреса, которое отключает пускатель движения вперед. Объект останавливается на заданной позиции.
Для отмены адреса нажимается кнопка, размыкающий контакт 17 которой обесточивает обмотку реле 12. 1. ..З. 1 памяти адреса.
Если в момент отмены адреса объект остановился между позициями адресования, по цепи: 4.2 - 7.2, 19.4 и 20.4, включа ется реле меж- позиционного останова, которое замыкающим контактом 18.3 через контакт .19.3 пускателя движения вперед.подает питание на обмотку 20.1. пускателя движения назад. Объект перемещается до первой позиции адресования, на которой датчик положения размы- каюпщм контактом 4.2 - 7.2 обесточивает обмотку 18.1 репе межпозиционного останова, замыкающий контакт 18.3 которого отключает пускатель движения назад.
Аналогично осуществляется вывод объекта из промежуточного положения при исчезновении напряжения и последующем его восстановлении.
Формула изобретения
Устройство для автоматического выбора направления движения объекта, содержащее реле памяти адреса, в цепь питания обмоток которого включены последовательно первые размыкающие контакты датчиков положения объекта, установленных на соответствз юищх позициях адресования, замыкающие контакты кнопок задания адреса, размыкающие контакты кнопок задания пре- дыдущих адресов, параллельно которым подключены первые замыкаюпще контакты соответствующих реле памяти адреса, а последовательно - размыкаюий контакт кнопки отмены адреса, реле запрета, в цепь питания обмотки которого параллельно включены вторые замыкающие контакты реле памяти адреса, третьи замыкающие контакты которых одним вьгоодом соединены с перой щиной источника питания, реле межпозиционного останова, в цепь питания обмотки которого последовательно включены вторые размьжающие контакты датчиков положения объекта и первые размыкающие контакты пускателей движения вперед и назад, па- . раллельно двум последним подключен первый замыкающий контакт реле межпо- згиционногр останова, второй замыкаюий контакт которого одним выводом
соединен с первой шиной источника питания, вторая щина которого подключена к одному вьюоду обмоток пускателей движения вперед и назад, другой вьтод первой из них подключен к одному Бьтоду второго размыкающего контакта пускателя движения назад,
ругой вьшод обмотки которого соединен с одним выводом второго размыкающего контакта пускателя движения
вперед, отличающееся тем, что,.с целью повышения надежности, оно снабжено диодами, датчики положения объекта снабжены замыкающими контактами, реле памяти адреса от второй до предпоследней по.зиций адресования - дополнительными замыкающими контактами, пускатели движения вперед и назад - замыкающими контактами, причем первые замыкающие контакты датчиков положения объекта от первой до предпоследней позиций адресования одним вьшодом соединены с другим выводом второго размыкающего контакта пускателя движения назад, а другим подключены к друго0
0
5
0
му выводу третьего замыкающего контакта реле памяти адреса следующей позиции адресования, а через диоды- к другим выводам третьих замыкающих контактов реле памяти адреса последующих позиций адресования, вторые замыкающие контакты датчиков поло- 5 жения объекта от второй до последней позиций адресования -одним вы- водрм и второй замыкающий контакт реле межпозиционно го останова другим выводом соединены с другим выводом второго размыкающего контакта пускателя движения вперед, а другим подключены к другому выводу третьего и дополнительных замыкающих контактов реле памяти адреса предыдущей позиции адресования, а через диоды- к другим выводам дополнительных замыкающих контактов реле памяти адреса предьщущих позиций адресования, параллельно первым замыкающим контактам датчиков положения объекта первой и последней позиций адресования подключены замыкающие контакты пускателей движения вперед и назад.
/7 tS,2
72, . /a 20.if.
/9.2
Д.
m .-
20.if.
I&JL
/5/
4
Изобретение относится к промышленному транспорту и может быть использовано для управления перемещением различных объектов с фиксированными позициями останова , в частности тележками, подъемниками, складскими механизмами. Цель изобретения - повышение надежности. Устройство содержит пускатели движения вперед, назад, реле памяти адреса, реле межпозиционного останова, реле запрета, датчики положения объекта, установленные на позициях адресования, кнопки задания адреса и его отмены, диоды. В цепи питания обмоток пускателей движения вперед, назад включены замыкающие контакты датчиков положения объекта, реле памяти адреса смежных позиций адресования, а через диоды - последующих и предыдущих позиций адресования. Задание адреса осуществляется соответствующей кнопкой. Реле памяти адреса через замыкающий контакт соответствующего датчика положения объекта подает питание на обмотку пускателя движения вперед, назад. Достигнув заданной позиции адресования, объект взаимодействует с соответствующим датчиком положения, который обесточивает пускатель, и объект останавливается на заданной позиции. 1 ил.
/5,.
2s:2 ,6,j
/Z.
/3.5. /9 5.
.
гп.
/8.J.
.
/аз
гй/
Г l
| Устройство для автоматического выбора направления движения объекта | 1982 |
|
SU1096169A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Устройство для видения на расстоянии | 1915 |
|
SU1982A1 |
| Устройство для автоматического выбора направления движения объекта | 1984 |
|
SU1164166A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Видоизменение прибора для получения стереоскопических впечатлений от двух изображений различного масштаба | 1919 |
|
SU54A1 |
