1
Изобретение относится к конструкции устройств, предназначенных для автоматизации технологических процессов машиностроения, и может быть использовано для выполнения промышленным роботом операций разметки, односторонней точечной сварки, клеп
ки, обработки несквозных и сквозных отверстий, забивания гвоздей, сборки с натягом, затяжки резьбовых соединений и других операций, требующих одностороннего силового воздействия на поверхность изделия.
Цель изобретения - повышение надежности работы.
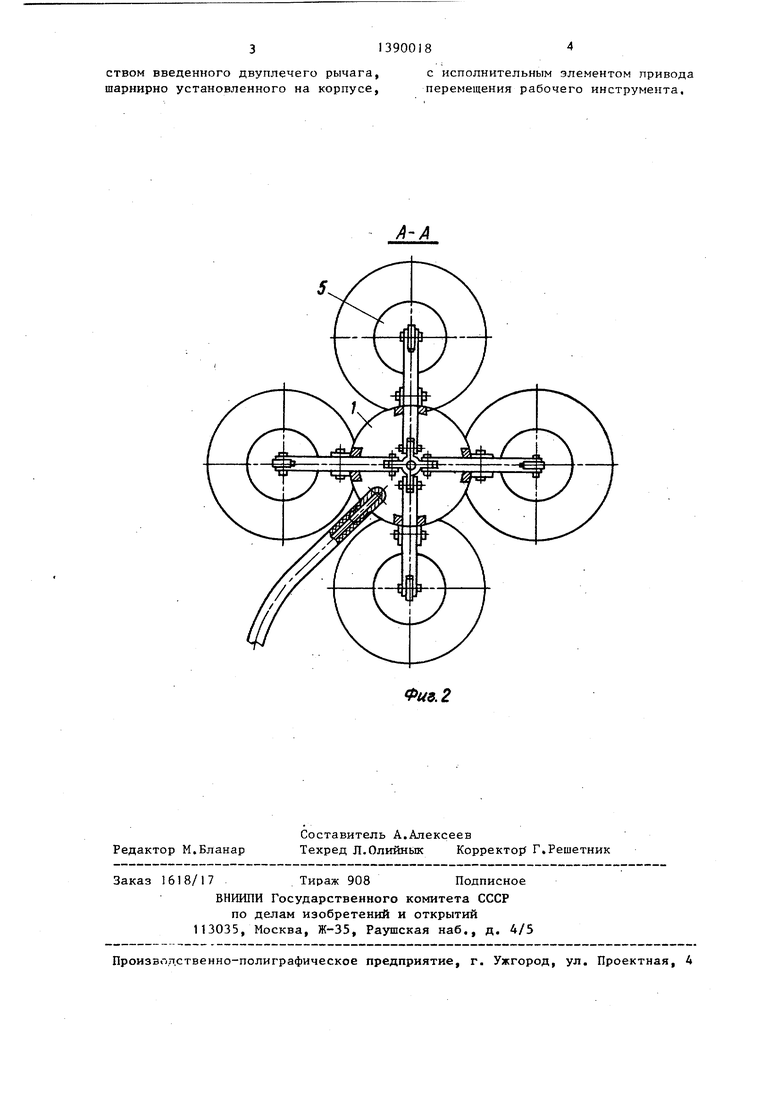
На фиг.1 изображена захватная головка, общий вид; на фиг.2 - разрез Л-А на фиг.1,
Захватная головка содержит корпус 1 привода, на штоке поршня 2 которого вьшолнен рабочий инструмент 3. Корпус 1 привода установлен на выходном звене 4 робота с возможностью возвратно-поступательного перемещения, внутренняя полость корпуса 1 подключена к пневмосети. Привод рабочего инструмента 3 снабжен вакуумными присосками 5, кинематически связанными с рабочим инструментом 3, выходное звено 4 робота снаб- йсено фиксатором 6 относительного .положения корпуса 1 привода. Фикса-- тор 6 выполнен в данном случае в виде электромагнита, а вакуумные присоски 5 снабжены полостью вакуумиро- вания с поршнем.
Захватная головка работает следующим образом.
Робот перемещает по программе захватную головку в точку обработки так, что обеспечивается прилегание кромок вакуумных присосок 5 к поверхности обрабатываемого изделия. В исходном положении, т.е. до оказания рабочим инструментом 3 силового воздействия на поверхность изделия, поршень 2 привода, жесткого связанный с рабочим инструментом 3, и вакуумные присоски 5 находятся в ней - тральном состоянии. По внешней команде фиксатор 6 расфиксирует корпус 1 привода относительно выходного звена 4 робота, а из пневмосети во внутреннюю полость корпуса 1 привода подается избыточное давление воздуха. Для увеличения силового.воздействия в противоположной относительно поршня 2 полости корпуса 1 одновре
5
0
5
0
5
0
5
0
5
менно может создаваться разрежение. Под действием давления воздуха поршень 2 вместе с рабочим инструментом 3 перемещается в направлении поверхности изделия, оказывая на нее силовое воздействие. За счет кинематической связи посредством двуплечих рычагов рабочего инструмента 3 с привод- ньш элементом - поршнем вакуумньпс
5 последние создают усилие It
присосок присасывания
к поверхности изделия, компенсирующее реакцию силового воздействия на ту же поверхность со стороны рабочего инструмента 3. Это усилие увеличивается прямо пропорционально величине силового воздействия рабочего инструмента на указанную поверхность.
Величина и интенсивность силового воздействия рабочего инструмента на поверхность изделия определяются характером выполняемого технологического процесса и зависят от выбранных скорости и величины давления в пневмосети. За счет деформации эластичных кромок вакуумных присосок 5 корпус 1 привода несколько перемещается относительно выходного звена 4 робота в направлении поверхности обрабатываемого изделия. Силовое воздействие на поверхность изделия прекращаетсй путем сброса давления в полости корпуса 1. Рабо- чий инструмент 3 возвращается в исходное положение. Корпус 1 привода перемещается в исходное положение за счет отжима эластичных кромок вакуумных присосок 5. Это положение снова фиксируется по внешней команде фиксатором 6. После этого робот по программе переносит захватную головку в следующую точку обработки, где технологическая операция выполняется в той же последовательности.
Формула изобретения
Захватная головка, содержащая корпус, на котором установлены рабочий инструмент с приводом его перемещения и захватный орган, отличающаяся тем, что, с целью повышения надежности работы, захватный орган выполнен в виде вакуумных присосок, каждая из которых снабжена полостью вакуумирования, в которой размещен поршень, связанный посредством введенного двуплечего рычага, шарнирно установленного на корпусе,
с исполнительным элементом привода перемещения рабочего инструмента.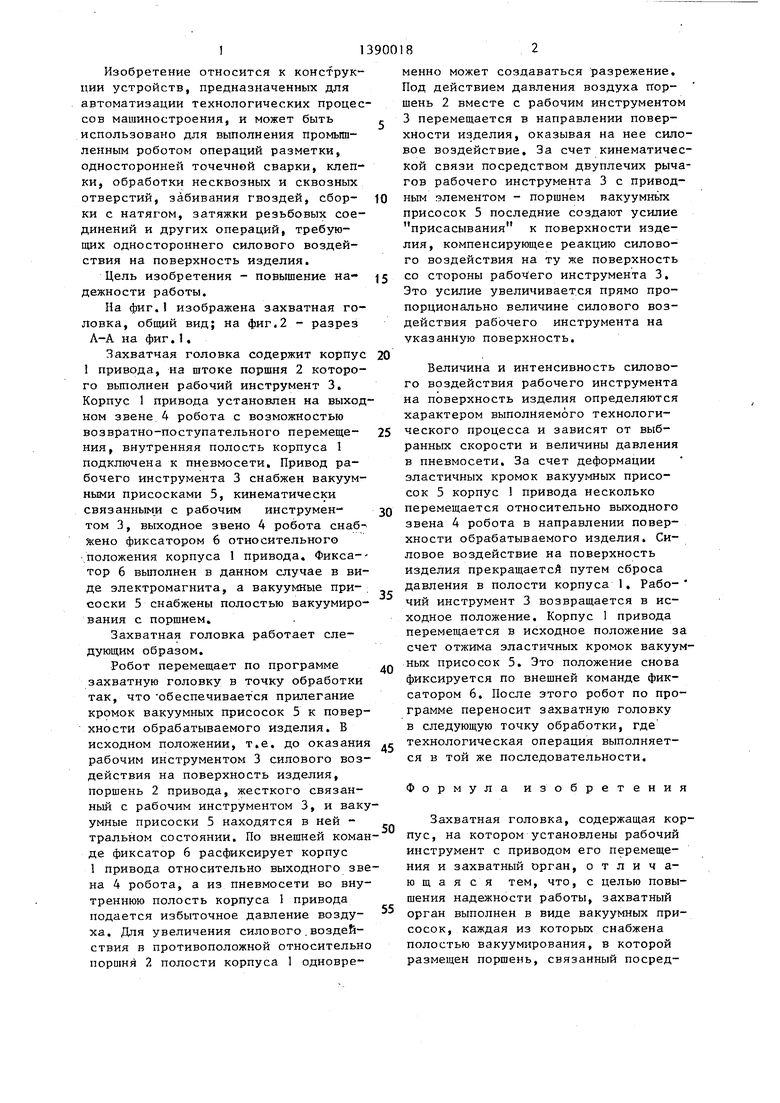
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватная головка | 1986 |
|
SU1414633A1 |
| Захватная головка | 1986 |
|
SU1414632A1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| Захватное устройство | 1986 |
|
SU1400876A1 |
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
| Устройство для подачи специй в консервную тару | 1990 |
|
SU1717483A1 |
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| ГИБКАЯ АВТОМАТИЗИРОВАННАЯ СИСТЕМА БАЗИРОВАНИЯ | 2012 |
|
RU2495738C1 |
Изобретение относится к конструкциям устройств, предназначеннбпс для автоматизации технологических процессов машиностроения, требующих одностороннего силового воздействия на поверхность изделия. Целью изобрете- НИН является повышение надежности работы. Захватная головка перемещается в зону обработки. После расфик- ,сации фиксатором 6 корпуса I привода во внутреннюю полость подается рабочая среда под давлением. Поршень 2 вместе с рабочим инструментом 3 перемещается в направлении поверхности изделия, оказывая на нее силовое воздействие. Посредством двуплечих рычагов за счет кинематической связи рабочего инструмента с приводным элементом - поршнем вакуумных присосок 5 последние создают усилие присасывания к поверхности изделия. Это усилие увеличивается пропорционально перемещению рабочего инструмента. 2 ил. i (Л со со 00 
Фиг. 2
| 0 |
|
SU138412A1 | |
| ,(54) ЗАХВАТНАЯ ГОЛОВКА | |||
