Известно применение в промышленности у ;иверсг.Ьны.х станков для гибки труб с обкаткой роликами, с гибким дорном а с использованием цепной передачи перемещения трубы. Однако зт;; станки имеют недостаток. В них отсутствуют регулируемые установкой по длине эле 1троконтакты, автоматически подающие команду изгибающему ролику о моменте начала гибки, заданном радиусе кривизны, продолжительности гибки и количестве гибок за время одного прохода трубы.
Описываемы. станок для гибки труб в холодном состоянии, имеющих несколько изгибов, идущих по разным направлениям обкаткой роликами, с применением гибкого дорна и цепной ме.хакизнрованной подачи устраняет указанный недостаток.
В целях автоматизации регулировки гибки труб ккогоколенного профиля с |Ki3Jib;:.a радиусами закругления за один проход, в него вмонтированы могущие перемещаться при настройке электроконтакты,, подающие через промежуточные механизмы электрические команды гибочному ролику на заданное профилирование трубы.
Вся серия труб, пропущенных через станок после настройки его на определенный профиль, автоматически в точности повторяет конфигурацию первого эталона. Этот станок может быть эффективен при крупносерийном производстве, когда требуется изготовление гнутых труб партиями.
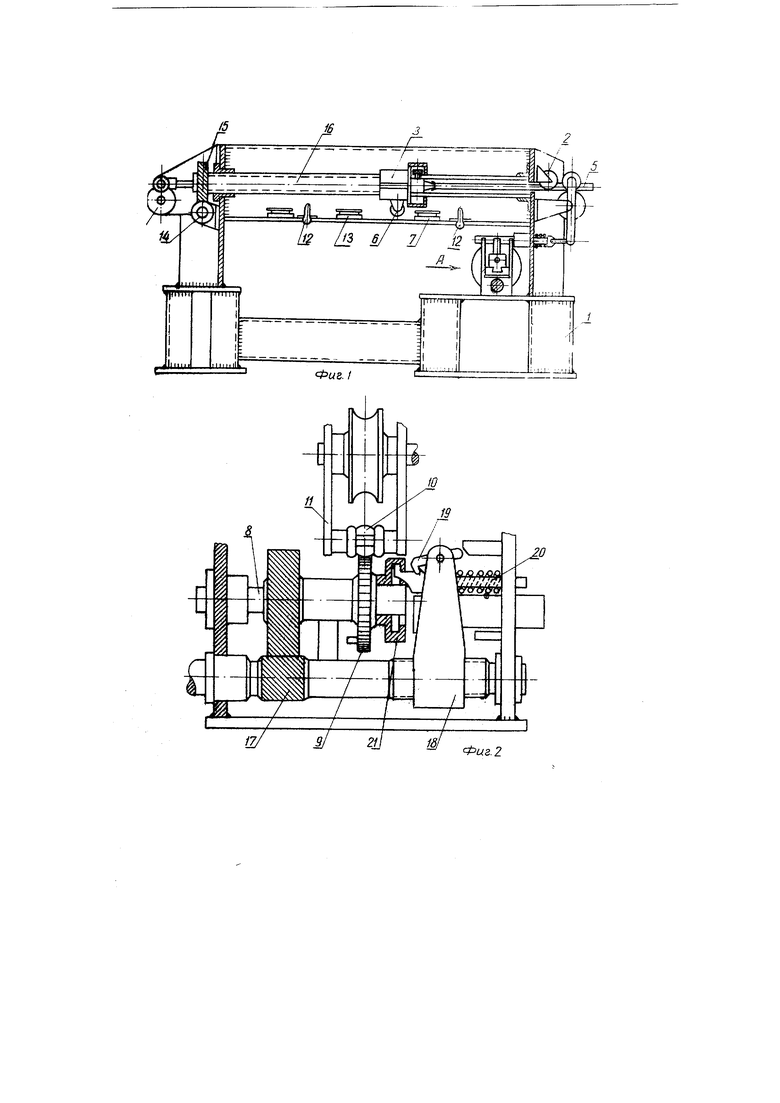
На фиг. 1 изображен станок-полуавтомат для гибки труб в холодном состоянии; на фиг. 2 - вид цо стрелке А на фиг. 1.
Станок состоит из сварной станины / и укрепленных на ней для гибки труб трех гибочных роликов 2. Передвигающийся ползун 3 при полшщи звездочек с цепью Галля 4 толкает изгибаемую трубу 5. На ползуне установлен контактный ролик 6, набегающий на контакт 7 гибки. Ролик включает электродвигатель гибки (не показанный на чертеже) , который через валик 8 вращает щестерню 9, поворачивающую в свою очередь зубчатую тягу 10, качалки //и оси изгибающих труб роликов.
Включатель i2 служит для обратного хода ползуна. Расстоянием от РсОгтакта гибки до вклЕОчателя обратного хода регулируется величина угла загиба трубы, подвергаемой гибке. Ползум с трубой нередвигается дальше и контактный ролик набегает на контакт 13, включает электродвигатель новорота и через валик с червяком 14 поворачивает шестерню 15 вместе с цилиндром поворота трубки 16. Величина поворота трубы регулируется длиной площадки контакта поворота. После поворота трубы на нужный угол повторяется процесс загиба трубы под заданным углом.
По окончании загиба трубы, при включении обратного хода электродвигателя гибки, желательно, чтобы ролик гибки делал обратный ход мгновеиио; для этого в конструкции станка предусмотрен механизм, в в котором прн включении рабочего хода электродвигателя гибки вращается вал 17 с резьбой и каретка 18 перемещается вместе с собачкой /.9. При включении обратного хода каретка движется в обратиом направлении. С помощью собачки и прижима 20 отводится контрящая муфта 2, а каретка находит иа кониевой выключатель и электродвигатель гибки трубы выключается.
Предмет и з о б з е т е н и я
Стаиок-полуавтомат для гибки труб в холодном состоянии обкаткой роликами с применением гибкого дорна и иепной механизированной подачи, отличающийся тем, что, с целью автоматизации регулировки изгибания трубы многоколе1;ного профиля с разными радиусаMii закругления за один проход, в него вмонтированы могущие перемещаться при настройке электроконтакты, подающие через промежуточные механизмы необходимые команды гибочному ролику на заданное профилирование трубы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Станок для гибки змеевиков | 1990 |
|
SU1726091A1 |
| Устройство для гибки труб обкаткой | 1978 |
|
SU747571A1 |
| Трубогибочный станок | 1984 |
|
SU1274802A1 |
| Станок для двусторонней гибки труб | 1986 |
|
SU1391764A2 |
| Станок для многоколенной гибки | 1961 |
|
SU147438A1 |
| Станок для изготовления змеевиков | 1980 |
|
SU863072A1 |
| Трубогибочный станок | 1981 |
|
SU1030064A2 |
| Станок для гибки цилиндрическихиздЕлий | 1979 |
|
SU804079A1 |
| Полуавтоматический станок для многоплоскостной гибки труб | 1972 |
|
SU548336A1 |
| Станок для гибки труб | 1990 |
|
SU1764740A1 |
Комитет по де,1ам изобретений и открытий при Совете Министров СССР Редактор Л. П. СитниковГр. 212
Информационно-издательский отдел.Подп. к печ. 8. г.
Объем 0,34 п. л.Зак,. 4093Тираж 1200Цена 50 коп.
Типография Комитета по делам изобретений и открыти при Совете Мииистроз СССР
Москва, Петровка. 14.
