Известны Станки для многоколенной гибки труб и прутков, закрепленных на нолзуне, с применением направляющих роликов и гибочного ролика. Однако с помощью таких станков гибка в разных плоскостях невозможна.
В описываемом станке для получения погибов в разных плоскостях на ползуне установлена поворотная шпиндельная бабка, в которой крепится изгибаемая труба или пруток, а один из направляющих роликов расположен на одноплечем рычаге совместно с гибочным роликом. Для получения погибов различных радиусов свободный конец рычага взаимодействует с кулачковой рейкой, жестко связанной с ползуном и задающей требуемый профиль погибов.
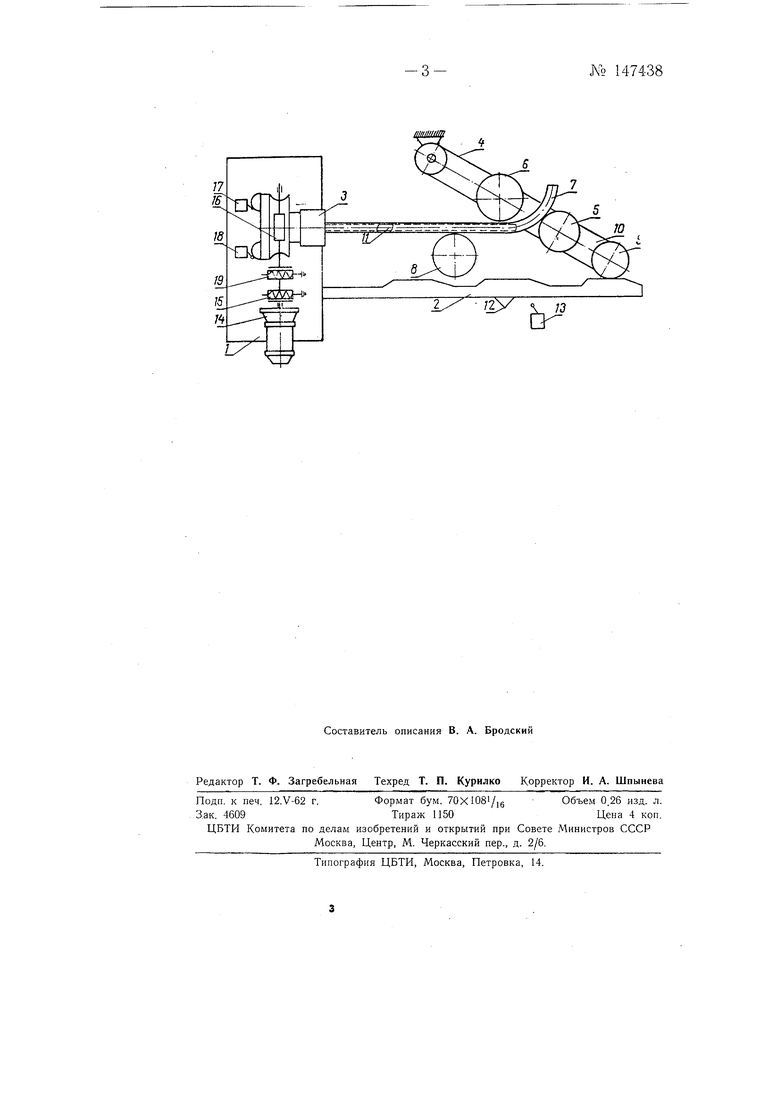
На чертеже изображена схема станка.
Станок для многоколенной гибки состоит из станины, ползуна /, перемещаемого возвратно-поступательно гидроприводом и жестко связанного с кулачковой рейкой 2, щпиндельной бабки 3, установленной поворотно на ползуне /, и одноплечего рычага 4, несущего гибочный ролик 5 и направляющий ролик 6.
Труба 7 или пруток, подлежащие гибке, закрепляются в щпиндельной бабке 3, после чего ползуну / сообщается продольное движение по станине станка. Труба 7 проходит между направляющими роликами 8 т 6, а затем, встретив гибочный ролик 5, начинает деформироваться причем радиус ее погиба задается в результате взаимодействия ролика 9, установленного на конце 10 рычага 4, с кулачковой рейкой 2. Для создания более благоприятных условий гибки и получения заданных величин радиусов погиба служит калибрующий дорн 11, вводимый внутрь трубы 7 и доходящий до зоны гибки№ 147438-2В случае необходимости перехода от выполнения гибки в одной плоскости к другой кулачок 12 воздействует на конечный выключатель 13, в результате чего включается электродвигатель 14, который через электромагнутную сцепную муфту 15 и червячную передачу 16 поворачивает бабку 3. При этом получение точной величины необходимого угла поворота бабки 3 обеспечивается тем, что несколько ранее полного поворота на требуемый угол конечный выключатель-/7 отключает муфту 15, а после значительного уменьшения угловой скорости бабки и ее подхода к нужному положению конечный выключатель 18 включает электромагнитный тормоз 19, окончательно останавливающий бабку 3 и фиксирующий ее в нужном положении. Затем процесс гибки продолжается так, как это описано выше.
Описываемый станок позволяет механизировать пространственную гибку труб и прутков, освободиться от применения тяжелого физического труда, повысить производительность при производстве арматурных и сантехнических работ и улучшить качество гибки.
Научно-исследовательский институт технологии машиностроения Ростовского совнархоза в своем заключении отметил промышленную полезность и оригинальность конструкции- станка, возможность получения на нем поворота шпиндельной бабки, в которой зажато изгибаемое изделие, с высокой точностью и рекомендовал станок для внедрения в производство.
Предмет изобретения
1.Станок для многоколенной гибки труб и прутков, закрепленных на ползуне, с применением направляющих роликов и гибочного ролика, отличающийся тем, что, с целью получения погибов в разных плоскостях, на ползуне установлена поворотная шпиндельная бабка, в которой крепится изгибаемая труба или пруток, а один из направляющих роликов расположен на одноплечем рычаге совместно с гибочным роликом.
2.Станок по п. 1, отличающийся тем, что, с целью получения погибов различных радиусов, свободный конец рычага взаимодействует с кулачковой рейкой, жестко связанной с ползуном и задающей требуемый профиль погибов.
1
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматический станок для подрезки торцов и снятия фасок | 1985 |
|
SU1355359A2 |
| Станок для гибки многоколенныхзМЕЕВиКОВ | 1979 |
|
SU837473A1 |
| Автоматический восьмишпиндельный токарный станок для прутковых работ с кулачковым управлением | 1959 |
|
SU133732A1 |
| Многошпиндельный токарный автомат | 1974 |
|
SU567554A1 |
| Станок для горячей навивки пружин | 1989 |
|
SU1667999A1 |
| Автоматический станок для подрезки торцов и снятия фасок | 1982 |
|
SU1034843A1 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ТРУБЫ ПРИ МНОГОКОЛЕННОЙ ГИБКЕ | 1991 |
|
RU2025167C1 |
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| Многопозиционный станок | 1979 |
|
SU921788A1 |