I Изобретение относится к машиностроению и может быть использовано при создании промьшшенных роботов и автооператоров. Цель изобретения - упрощение про rpaMhw управления манипулятором путем кинематической развязки ориенти степеней подвижности. На чертеже представлена кинематическая схема двухсторонней руки. Рука содержит корпус 1, на торец которого установлен волновой редуктор 2 вращения кисти, содержащий жесткое колесо 3, жестко связанное с корпусом 1, гибкое колесо 4 и генератор 5 волн, На гибком колесе 4 закреплена кисть 6, состоящая из ко пуса 7, в который встроен волновик 8 качания схвата, жесткое колесо 9 которого жестко связано с корпусом 7, а на гибком колесе 10 установлен схват 11. Генератор 12 сидит на оси 13, на которой жестко закреплено ко ническое колесо 1Д, входящее в заце ление с коническим колесом 15, уста новленным на валу 16, связанным с гибким колесом 17 волнового редуктора 18 развязки движений, жесткое колесо 19 которого установлено на подшипниках 20 в корпусе 1 руки, а генератор 21 посредством вала 22 связан с генератором 5 волнового редуктора вращения кисти. Жесткое колесо 19 волнового редуктора 18 развязки движений связано с двигате лем 23, а вал 22 посредством зубчатой пары 24 связан с двигателем 25. 7 Работа руки манипулятора осуществляется следующим образом. При качании схвата двигатель 23 вращает волновой редуктор 18 развязки движений, вращается вал 16, жестко связанный с гибким колесом 17, через зубчатые колеса 15 и 14 заставляет вращаться ось 13 с закрепленным на нем генератором 12, который приводит в движение гибкое колесо 10 с закрепленным на нем схватом 11, т.е. происходит качание схвата. Вращение кисти осуществляется следующим образом. Вал двигателя 23 держит жесткое колесо 19, которое благодаря этому неподвижно относительно корпуса 1. Двигатель 25 через зубчатую пару 24 приводит в движение вал 22 с жестко закрепленными на нем генераторами 5 и 21. Генератор 5 заставляет вращаться гибкое колесо 4 волнового редуктора 2 вращения кисти с сидящей на ней кистью, а генератор 21 заставляет вращаться гибкое колесо 17 волнового редуктора 18 развязки движений и жестко с ним связанный вал 16 с сидящим на нем коническим колесом 15. Вал 16 и гибкое колесо 4 с сидящей на нем кистью 6 вращаются в одну сторону с одинаковой угловой скоростью за счет того, что передаточные отношения волновых редукторов 2 и 18 одинаковые, благодаря этому при вращении кисти 6 не происходит качание схвата 11.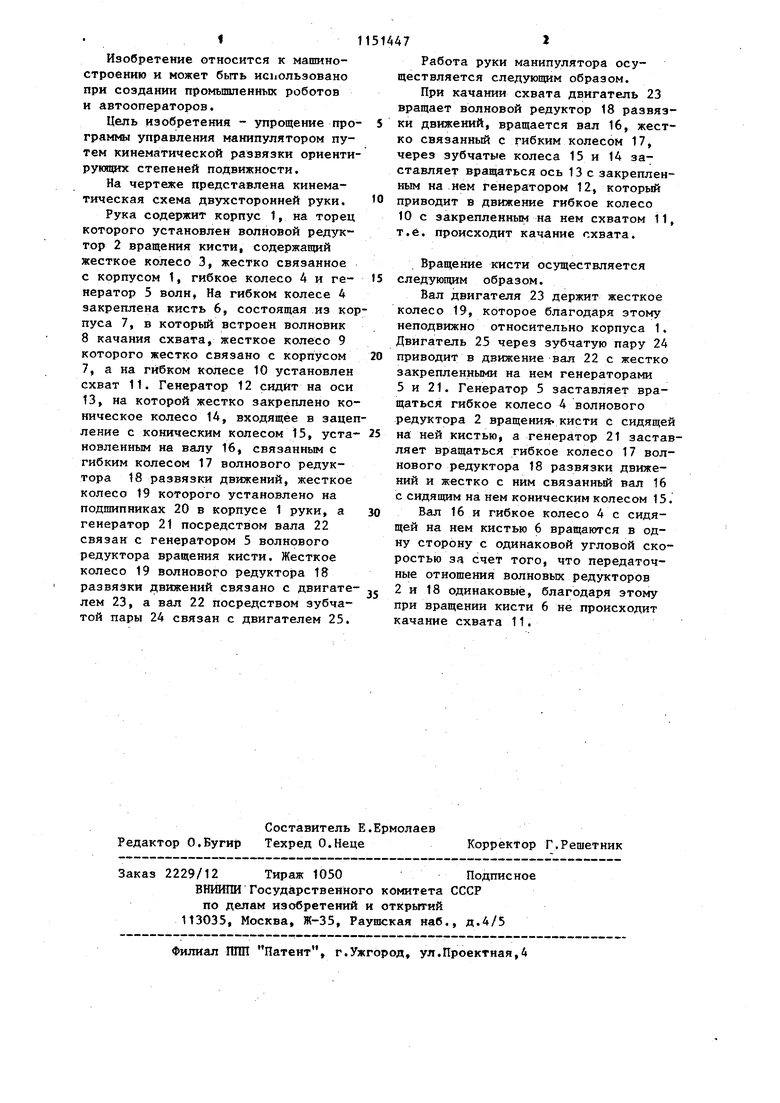
| название | год | авторы | номер документа |
|---|---|---|---|
| Рука манипулятора /ее варианты/ | 1983 |
|
SU1199608A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| Рука манипулятора | 1981 |
|
SU1007961A1 |
| Рука манипулятора | 1982 |
|
SU1007963A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Рука манипулятора | 1985 |
|
SU1311929A1 |
| Манипулятор | 1982 |
|
SU1085804A1 |
| Модуль руки промышленного робота | 1991 |
|
SU1757869A1 |
| Рука манипулятора | 1983 |
|
SU1117204A1 |
| Промышленный робот | 1987 |
|
SU1481057A1 |
РУКА МАНИПУЛЯТОРА, содержащая корпус, кисть, охват, двигатели, волновые редукторы вращения кисти и качания схвата, включающие корпуса с жесткими колесами, генераторы волн и гибкие колеса, а также коаксиальные валы, один из которых кинематически связан с генератором волн редуктора качения схвата,о т л и ч а ю щ а я с я тем, что, с целью упрощения программы управления путем кинематической развязки ориентирующих степеней подвижности, она снабжена дополнительным волновым редуктором, корпус которого с жестким колесом установлен с возможностью вращения в опорах корпуса руки и жестко связан с валом двигателя качания схвата, причем вал генератора волн редуктора вращения кисти вьшолнен полым и жестко связан с генератором волн дополнительного редуктора, а вал, кинематически связанный с генератором волн редзктора качания схвата, размещен в этом полом валу и жестко связан с гибким колесом дополнительного редуктора, при этом передаточное отношение последнего W равно передаточному отношению редуктора вращения кисти. п W ел NJik J 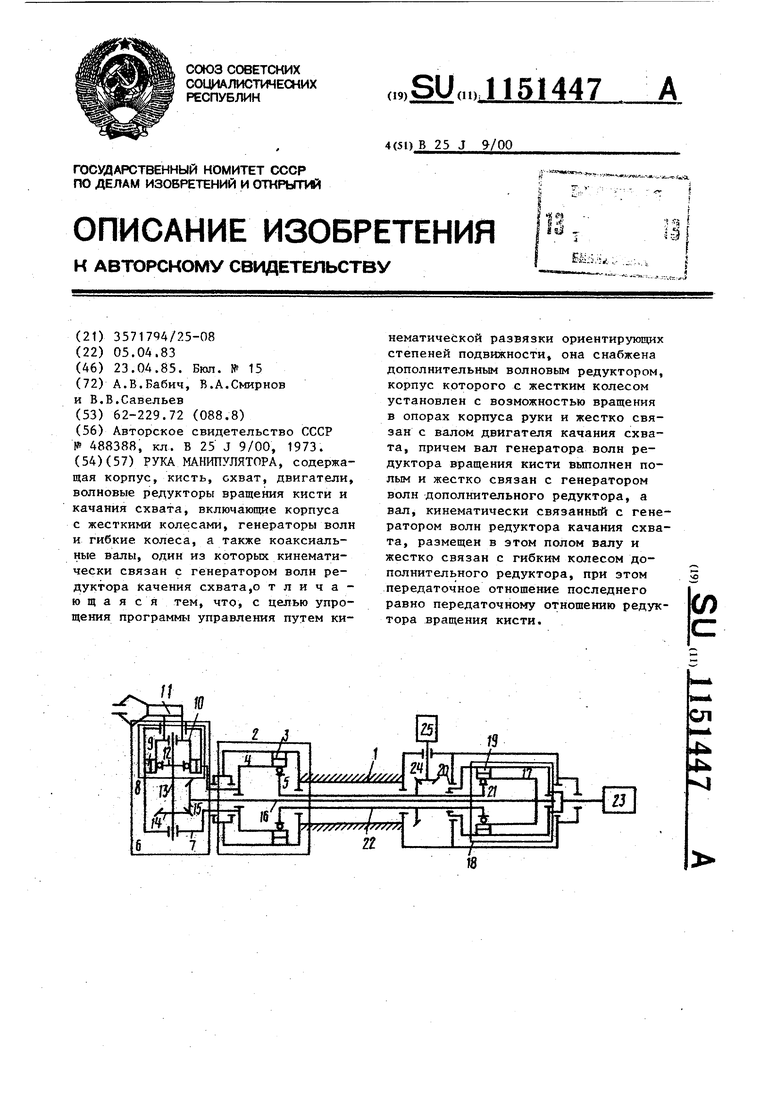
| Манипулятор | 1973 |
|
SU488388A3 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
