(54) КОНТЕЩНЕРОВОЗ
| название | год | авторы | номер документа |
|---|---|---|---|
| Контейнеровоз | 1981 |
|
SU992261A2 |
| Контейнеровоз | 1980 |
|
SU921901A1 |
| Контейнеровоз | 1978 |
|
SU691316A1 |
| Полуприцеп-контейнеровоз | 1989 |
|
SU1782807A1 |
| Контейнеровоз | 1986 |
|
SU1418121A1 |
| Контейнеровоз | 1984 |
|
SU1194725A1 |
| Транспортное средство | 1985 |
|
SU1320095A1 |
| Контейнеровоз | 1984 |
|
SU1220960A2 |
| Транспортное средство | 1984 |
|
SU1152821A1 |
| Контейнеровоз | 1987 |
|
SU1507611A2 |
1
Изобретение относится к подъемно-транспортному оборудованию, используемому для погрузки, перегрузки и перевозки различных грузов.
По основному авт. св. № 691316 известен контейнеровоз, содержащий основную вилкообразную раму с опорными колесами и установленный на ней шарнирно складывающийся подъемный механизм, в верхней части которого размещена телескопическая рама с закрепленной на ней поворотной рамкой, имеющей посадочные места и запорные устройства под контейнер, при этом на телескопической раме и поворотной рамке установлены фиксаторы.
Однако ни известном контейнеровозе не обеспечивается надежная фиксация контейнеров в посадочных местах поворотной рамки, вследствие чего он не может быть использован с контейнерами различных типов, и не обеспечивается полная безопасность его эксплуатации.
Цель изобретения - расширение функциональных возможностей контейнеровоза путем обеспечения установки на нем контей еров различных типов и повыщение безо,пасности эксплуатации.
Поставленная цель достигается тем, что контейнеровоз снабжен запорным устройством, представляющим собой попарно связанные ползуны, охватывающие лонжероны, поворотной рамки, жестко установленные внутри лонжеронов последней вставки с цилиндрическими выточками, и кулачки, закрепленные на щтоках гидроцилиндров, которые посредством пальцев связаны с соответствующими по лзунами каждой пары.
Кроме того кулачки представляют собой
10 секторы, наружный профиль которых повторяет форму цилиндрических выточек вставок.
При этом на лонжеронах поворотной рамки закреплены продольные направляющие,
15 в которых установлены пальцы, соединяющие щтоки гидроцилиндров с соответствующими ползунами.
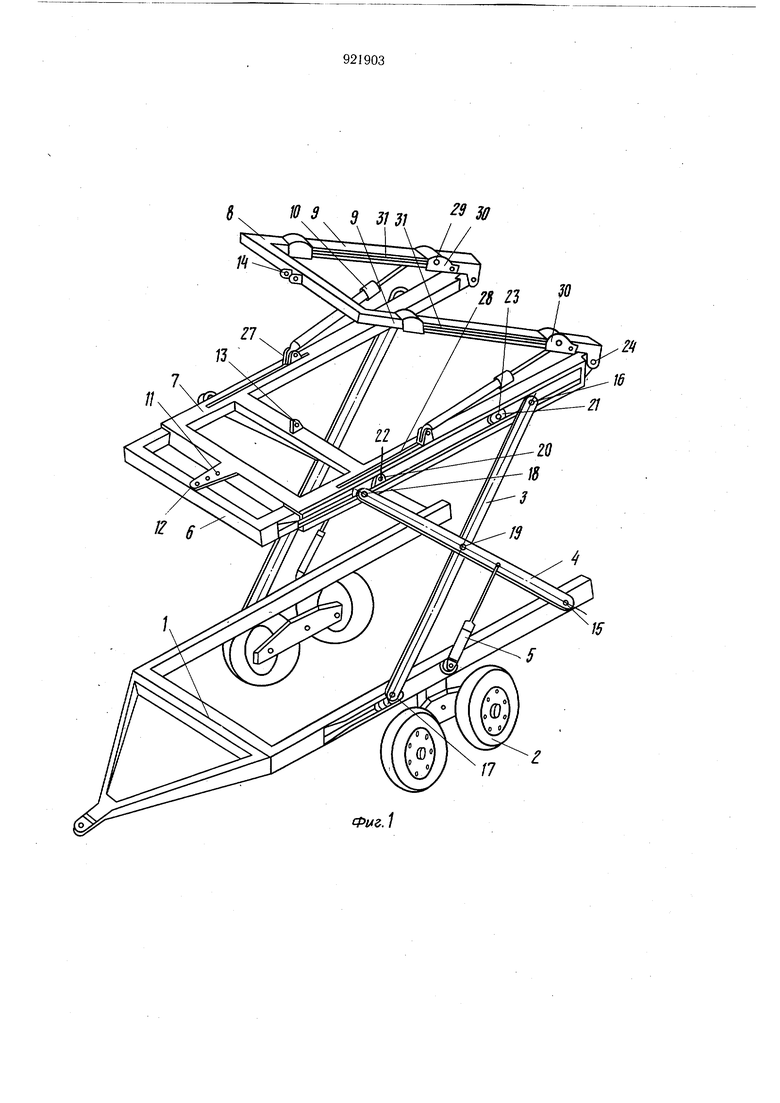
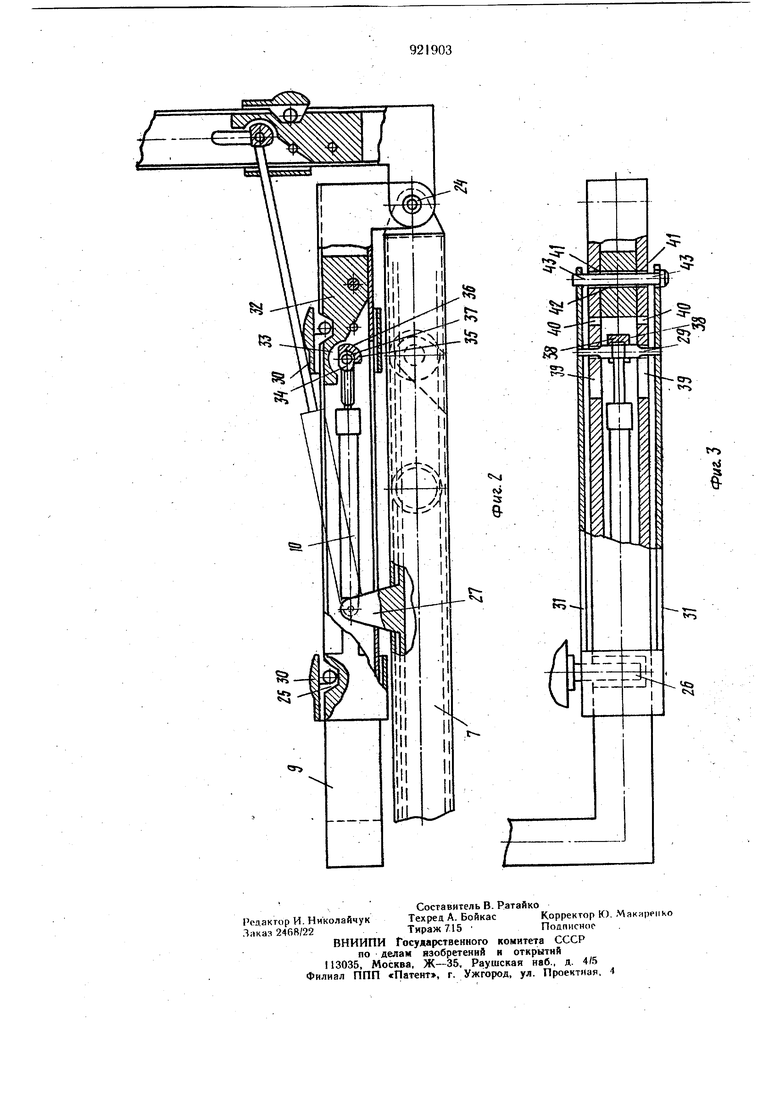
На фиг. 1 изображен контейнеровоз, об2Q щий вид; на фиг. 2 - запорное устройство, вид сбоку; на фиг. 3 - то же, вид сверху.
Контейнеровоз включает вилкообразную раму 1 с опорными колесами 2, щарнирно складывающийся подъемный механизм, состоящий из подъемных рычагов 3 и
4 и гидроцилиндров 5, размещенную в верхней части подъемного механизма дополнительную телескопическую раму, выполненную в виде неподвижной 6 и подвижной 7 частей, закрепленную на подвижной части поворотную рамку 8, состоящую из лонжеронов 9, гидроцилиндры 10, фиксатор дополнительной телескопической рамы, выполненный в виде планки 11 с отверстиями под палец 12, фиксатор поворотной рамки,
состоящий из проушин 13 и 14 с отверстиями под палец 12.
Подъемные рычаги 3 и 4 одними концами щарнирно соединены на осях 15 и 16, закрепленных соответственно на вилкообразной раме I и неподвижной части б телескопической рамы, а другими концами с помощью катков 17 и 18 контактируют с поверхностью продольных пазов, выполненных в вилкообразной раме 1 и неподвижной части 6 телескопической рамы. Подъемные рычаги 3 и 4 шарнирно соединены между собой осью 19.
Подвижная часть 7 телескопической рамы опирается на катки 20 и 21, установленные на осях 22 и 23, закрепленных в неподвижной части 6. Кроме того, на подвижной части 7 телескопической рамы закреплена фиксирующая планка 11 с отверстиями, положение пальца 12 в которых в зависимости от условий загрузки может быть переменным, а на перемычке этой части рамы закреплена проушина 13. Поворотная рамка 8, непосредственно взаимодействующая со сменным оборудованием, связана с подвижной частью 7 телескопической рамы осью 2
В поворотной рамке 8 выполнены посадочные места 25 в виде вырезов под пальцы 26 сменного оборудования. На неподвижной части 6 телескопической рамы установлены кронштейны 27 в продольных пазах 28 подвижной части 7 телескопической рамы, служащие для присоединения гидроцилиндров 10. Гидроцилиндры 10 посредством пальцев 29 взаимосвязаны с одним из каждой пары ползунов 30 запорного устройства, охватывающих лонжероны 9 поворотнойрамки 8 и соединенных между собой тягами 31.
Внутри продольных лонжеронов 9 поворотной рамки жестко установлены вставки 32 запорного устройсгва с цилиндрическими выточками 33. На головках 34 штоков гидроцилиндров 10 закреплены кулачки 35 запорного устройства, выполненные в виде секторов, составленных из профильной наружной части 36, выполненной по форме цилиндрических выточек 33 во вставках 32, внутренней цилиндрической части 37, выполненной по форме головок 34 щтоков гидроцилиндров 10, соединяющих их боковин 38. Кулачки 35 установлены на головках так, что одна из боковин 38 расположена параллельно штокам гидроцилиндров 10. На лонжеронах 9 поворотной рамки закреплены
продольные направляющие 39, в которых перемещаются пальцы 29, соединенные со штоками гидроцилиндров 10.
На лонжеронах 9 поворотной рамки и вставках 32 запорного устройства имеются отверстия 40, 41 и 42, предназначенные для фиксации ползунов 30 с помощью соединительных пальцев 43 для фиксации ползунов 30 с помощью соединительных пальцев 43.
Контейнеровоз с контейнерами и сменным оборудованием может выполнять различные виды работ.
С контейнером общего назначения, с контейнером для загрузки картофелесажалок, контейнером для загрузки сеялок контейнеровоз может выполнять транспортирование материала, разгрузку его в транспортные агрегаты или высевающие машины, погрузку контейнеров с материалом в транспорт ные средства. С вильчатым устройством контейнеровоз выполнять транспортирование материала в емкостях и таре на поддонах,.погрузку и разгрузку материала в емкостях и таре на транспортные средства, с седельно-сцепным устройством - транспортировку полуприцепов с последующей их разгрузкой, с ковшом - погрузку материала .в транспортные средства или контейнеры.
Контейнеровоз может выполнять и ком бинированные виды работ.
При работе сменного оборудования необходимо поворотную рамку 8 ytTaHOBHib в горизонтальное положение при расфиксированных пальцах 43 и гидроцилиндрами 10, переместив ползуны 30, открыть посадочные места 25 под пальцы 26 сменного оборудования. Гидроцилиндрами 5 дополнительная телескопическая рама переводится в крайнее нижнее положение.
Контейнеровоз задним ходом подают к сменному оборудованию, например, к контейнеру, охватывая его вилкообразной рамой, до упора поперечной балкой поворотной рамки в его торцовую стенку, т.е. контейнеровоз занимает такое положение, при котором пальцы 26 контейнера располагаются под посадочными местами 25. Затем гидр.оцилиндрами 5 производят подъем дополнительной телескопической рамы, захватывая контейнер.
Сбрасывание контейнера осуществляется в обратной последовательности.
При перегрузке контейнеров необходимо замкнуть проушины 13 и 14 фиксатора поворотной рамки 8 сменным пальцем 12 и зафиксировать пальцами 43 ползуны 30 запорного устройства с лонжеронами 9 поворотной рамки 8 (т.е. зафиксировать ползуны 30 запорного устройства в разомкнутом положенииД и с помощью гидроцилинДров 10 выдвинуть подвижную часть 7 телескопической рамы над платформой загружаемого транспортного средства, (дополнительная телескопическая рама предварительно
гидроцилиндрами 5 установлеиа на необходимую высоту), опустить ее, освободив при этом пальцы 26 из посадочных мест 25, и установить подвижную часть дополнительной телескопической рамы в крайнее переднее положение.
При выгрузке материала из контейнеров общего назначения необходимо зафиксировать подвижную 7 и неподвижную 6 части телескопической рамы, установив палец 12 в одно из отверстий планки 11 и отверстие на поперечном лонжероне неподвижной части 6 телескопической рамы, и расфиксировать ползуны 30 запорного устройства и лонжероны 9 поворотной рамки 8. Выдвигая штоки гидроцйлиндров 10 до упора пальцами 29 в торцы- продольных направляю щих 39, ползунами 30 замыкаю пальцы 26 в посадочных местах 25. При дальнейшем выдвижении штоков гидроцилиндров 10 пальцы 29, взаимосвязанные с ними, воздействуют на поворотную рамку и опрокидывают ее вокруг оси 24. При этом происходит выгрузка материала из контейнера. Во время поворота рамки на угол, превышающий 90° к продольной оси гидроцилиндра, пальцы 26 контейнера удерживаются в посадочных местах 25 от расфиксации кулачками 35 во вставках 32, так как в этом положеиии гидроцилиндр 10, воздействуя через палец 29 на запорное устройство, может переместить ползуны в обратном направлении, что приведет к потере контейнера. Устаноэка контейнера в горизонтальное положение осуществляется в обратной последовательности, а -сбрасывание и забор-аналогично описайиым операциям по забору и сбрасыванию контейнеров.I
При работе с оборудованием, требующем надежного крепления, например с вильчатым устройством, ковшом, контейнером для загрузки сеялок и т.п., необходимо зафиксировать подвижную 7 и неподвижную 6 части телескопической рамы, установив палец 12 в одно из отверстий планки 11 и отверстие в поперечном лонжероне неподвижной
части 6 телескопической рамы, и вставить пальцы 43 в соответствующий отверстия, жестко сблокировав ползуны 30 и лонжероны 9. Такое положение фиксирующих пальцев 43 и ползунов 30 позволяет.обеспечить фиксацию сменного оборудования во всех положениях поворо ной рамки.
При перевозке контейнеров и использовании контейнеровоза с седельно-сцепным устройством необходимо замкнуть проушины 13 и 14 фиксатора поворотной рамки 8 сменным пальцем 12, а пальцы 43 запорного устройства установить аналогично их положению при работе с оборудованием, требующим надежного крепления.
Применение перечисленных операций в различной последовательности позволяет производить различные комбинации разгрузки, перегрузки и перевозки контейнеров.
Формула изобретения
0 отличающийся тем, что, с целью расширения его функциональных возможностей путем обеспечения установки на нем контейнеров различных типов и повышения безопасности эксплуатации, он снабжен запорным устройством, представляющим собой попарно связанные ползуны, охватывающие лонжероны поворотной рамки, жестко установленные внутри лонжеронов последней вставки с цилиндрическими выточками и кулачки, закрепленные на штоках гидроцилиндров, которые посредством пальцев связаны с соответствующими ползунами каждой пары.
форму цилиндрических выточек вставок.
