Изобретение относится к области автоматического управления и может быть использовано для управления объектами, от которых в процессе функционирования требуется достаточно быстрая и точная отработ- ка задающих воздействий, например в роботостроении - в системах автоматического управления приводами рабочих органов ма- нипуляционных роботов, в станкостроении - в системах автоматичеоского управления приводами главного движения металлоре- жущих станков, в металлургии - в системах автоматического управления приводами прокатных станов.
Цель изобретения - повышение быстродействия и точности управления.
На чертеже показана функциональная схема самонастраивающейся системы управления.
Самонастраивающаяся система управления содержит сумматор 1, объект 2 регулирования, устройство 3 сравнения, модель 4, блок 5 релейных элементов, блок 6 фильтров, первый инвертор 7 и второй инвертор 8.
Самонастраивающаяся система управления работает следующим образом.
Задающий входной сигнал системы поступает на первый вход сумматора 1. С выхода сумматора 1 сигнал, равный отклонению регулируемой переменной на втором и третьем входах сумматора 1 от заданного значения входной переменной на первом входе, поступает на вход объекта 2 регулирования и вход модели 4. При совпадении динамических свойств объекта 2 регулирования и модели 4 сигналы, поступающие на первый и второй входы сравнивающего устройства 3, равны и поэтому сигнал с выхода сравнивающего устройства 3 равен нулю. При этом работает лишь контур из блоков 1 и 2. Контура адаптации и идентификации отключены.
Предположим, что выходной сигнал объекта 2 регулирования отличен от выходного сигнала модели 4. При этом на выходе уст- ройства 3 сравнения появляется сигнал ощибки, равный отклонению заданного значения выходной переменной модели 4 от дей
5
0
0
5
0
ствительного значения выходной переменной объекта 2 регулирования. С выхода устройства 3 сравнения сигнал ощибки поступает на вход блока 5 релейных элементов, на выходе которого формируется разрывное управление моделью 4 таким образом, чтобы в контуре из блоков 4, 3 и 5 существовал скользящий режим, во время которого сигнал на выходе модели 4 подгоняется под выход объекта регулирования 2. Одновременно вычисленное разрывное управление поступает на вход блока 6 фильтров и вход второго инвертора 8.
На входе блока 6 фильтров формируется среднее,эквивалентное значение разрывных сигналов, которое затем инвертируется на первом инверторе 7 и через второй вход сумматора 1 поступает на вход объекта 2 регулирования и вход модели 4. На модели 4 данный сигнал компенсирует среднюю составляющую разрывного сигнала, поступающую на второй вход модели. 4, таким образом охраняя заданные эталонные свойства модели 4, а поступая на объект 2 регулирования, компенсирует те параметрические или сигнальные возмущения, которые вызвали отклонение выхода объекта 2 регулирования от модели 4,
На выходе второго инвертора 8 формируется сигнал управления поступающий на третий вход модели 4, который позволяет облегчить режим адаптации в контуре из блоков 4, 3 и 5, уменьщая время и ошибку адаптации, и, следовательно, повысить быстродействие и точность управления.
40
35
Формула изобретения
Самонастраивающаяся система управления по авт. св. № 1153314, отличающаяся тем, что, с целью повышения быстродействия и точности управления, она содержит второй инвертор, подключенный выходом к третьему входу модели, а входом - к выходу устройства сравнения, третий вход сумматора соединен с выходом объекта регулирования.
S/
iTi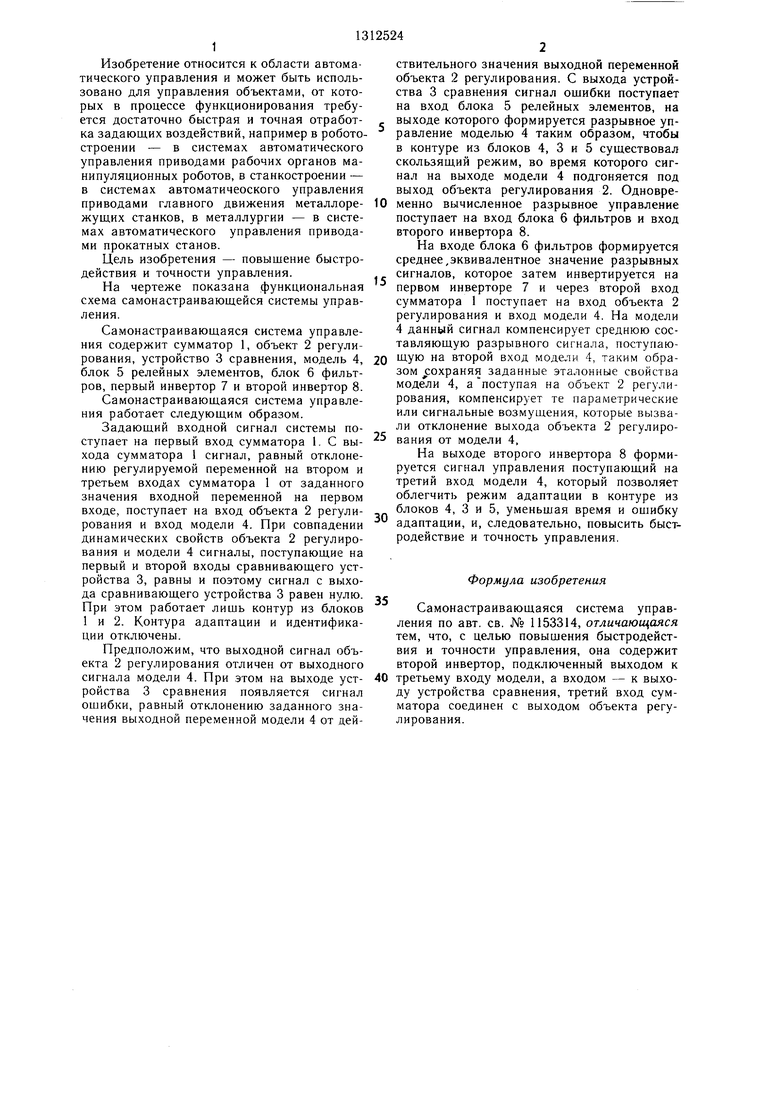
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1983 |
|
SU1153314A1 |
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Адаптивная система управления | 1982 |
|
SU1071996A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2015 |
|
RU2612340C1 |
| Адаптивная система управления для объектов с запаздыванием | 1985 |
|
SU1310774A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU928300A1 |
| Адаптивная система контроля и регулирования | 1982 |
|
SU1070507A1 |
| Адаптивная система управления для объектов с изменяющимся запаздыванием | 1984 |
|
SU1191884A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2007 |
|
RU2368934C2 |

Изобретение может быть использовано в системах автоматического управления, например в системах управления электроприводом постоянного тока, в роботостроении - в системах автоматического управления приводами рабочих органов манипу- ляционных роботов, в металлургии - в системах автоматического управления приводами прокатных станов, в станкостроении - в системах автоматического управления приводами главного движения металлорежущих станков. Целью изобретения является повышение быстродействия и точности регулирования. Сушность изобретения заключается в том, что в известную самонастраиваюш,уюся систему управления по а.с. № 1153314 дополнительно введен второй инвертор, выход которого соединен с третьим входом модели, а вход - с выходом устройства сравнения, причем выход объекта регулирования соединен с третьим входом первого сумматора. В предлагаемой системе связь выход объекта регулирования - третий вход сумматора приводит к увеличению числа настраиваемых параметров модели, по которым адаптивное управление замкнуто в отличие от возможности незамкнутости адаптивной системы по всем настраиваемым параметрам. Кроме того, ввод дополнительного идентификационного контура (модель - устройство сравнения - второй инвертор - модель) позволяет увеличить адаптивную составляющую сигнала управления, подаваемую на вход модели, уменьшает возможность возникновения условий нарушения скользящего режима. 1 ил. € (Л со N3 СП ГО 4 NJ
/
CvJ
GO
/
| Самонастраивающаяся система управления | 1983 |
|
SU1153314A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
