СП
42)1
о
СО
Изобретение относится к подъемнотранспортной технике, а именно к инерционным конвейерам, и.может быть использовано для транспортирования сыпучих, кусковых и других наволочных груэоа в различных отраслях промьпиленности.
Известен инерционный конвейер, включающий установленный на роликах желоб, связанный с приводом его возвратно-поступательного перемещения0
Недостатком данного конвейера является ненадежность работы реверсивного привода для перемещения желоба.
Наиболее близким техническим реше нием к изобретению является инерционный конвейер, включающий желоб с роликами, установленный на станине с возможностью возвратно-поступательного движения, и привод желоба с кривошипно-шатунным механизмом,, смон;Тированным на соосных валах .
л . - «-ч , , Недостатком известного конвейера является нерегулируемость его производительности для различных грузов , так как прямой и.обратный ход одинаковы.. .
Цель .изобретения расширение технологических возможностей.
Поставленная цель достигается тем, что в инерционном Конвейере, содержащем желоб с роликами, установленными на станине с возможностью возвратно-поступательного движения, и привод желоба с кривошипно-шатунньш механизмом, смонтированным на соосных.валах, конвейер снабжен установленными на станине тележка, ми с ограничителями, желоб - упорами, а привод - дополнительным кривошипно-шатунным механизмом, при этом каждый упор связа с шатуном соответствующего кривошипно-шатунного механизма посредством пружины, а каждый кривопшп связан ю соответствующим валом посредством храпового механизма. Кроме того, каждый ограничитель тележки связан со станиной при помощи регулировочного винта.
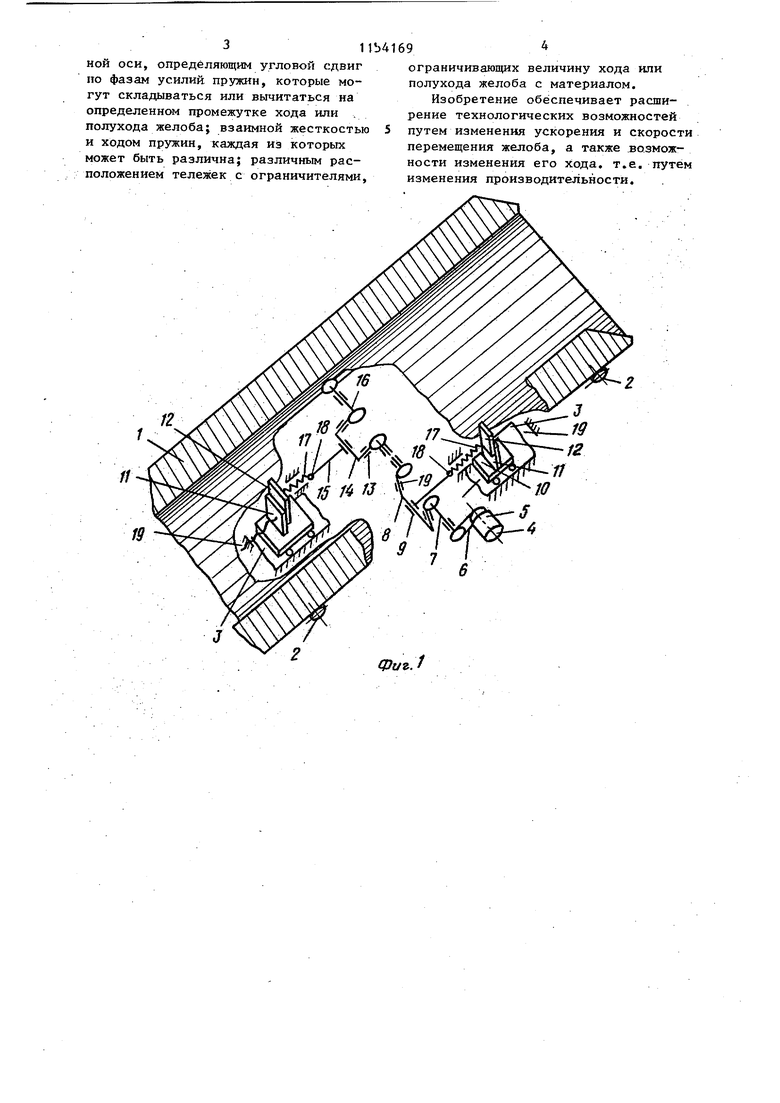
На фиг. 1 - показан конвейер, аксонометрия; на фиг, 2 - узел сопряжения кривошипа с приводным валом; на фиг. 3 - вид А на фиг. 2.
Инерционный конвейер содержит желоб 1 с роликами 2, установленный на станине 3 с возможностью возвратно-поступательного перемещения от привода 4. Привод 4 состоит из
электродвигателя 5 ременной передачи 6 со щкйвами для передачи вращения на приводной вал 7, с которым связан кривошип 8 с шарнирно соединенным шатуном 9.
Конвейер снабжен установленными на станине 3 тележками ТО с ограничителями 1 1 , желоб - упорами 12, а. привод - дополнительным кривошипно-щатунным механизмом 13 с кривошипом 14 и шатуном 15. Кривошип 14 связан с приводным валом 16, установленным соосно с приводным валом 7 Упоры 12 желоба 1 связаны с шатунами 9 и 15 посредством пружин 17. Пружины 17 и шатуны 9 и 15 соединены между собой шарниром 18. Ограничители 11 соединены со станиной 3 регулировочными винтами 19. На каждом приводном валу 7 и 16 насажено по два храповых колеса 20 и 21 с взаимно-противоположными зубчатыми поверхностями, с которыми взаимодействзшт еобачки 22 и 23 в зависимости от того., в какую сторону вращается приводной вал. СобаЧки 22 и 23 уставовлены на оси 24 рычага 25 соответствующего кривошипа 8 или 14. Рычаг 25 выполнен с возможностью регулирования его длины и устанавливается на соответствующем приводном валу под любым углом относительно горизонтальной оси и может фиксироваться в этом положении посредством собачек 22 или 23.
Конвейер работает следующим образом.
.Вращение от электродвигателя 5 через ременную передачу 6 передается на приводные валы 7 и 16. Приводные валы 7 и 16, вращаясь, передают движение кривошипам 8 и 14, которые воздёйствутот посредством шатунов 9 и 15 на пружины 1.7, которые через упоры 12, жестко закрепленные на желобе 1, заставляют двигаться желоб 1 возвратно-поступательно, при этом упоры 12 в конце хода взаимодействуют с ограничителями 11, установленными на тележках 10. Положение тележек 10 на станине 3 устанавливается регулировочным винтом 19. Характер движения желоба 1 определяется несколькими факторами: величиной радиуса кривошипов, который может быть разный между одним и другим кривош{п(; взаимным расположением кривошипов по кругу относительно горизонталь3Uной оси, определяющим угловой сдвиг по фазам усилий пружин, которые могут складываться или вычитаться на определенном промежутке хода или . полухода желоба; взаимной жесткостью и ходом пружин, каждая из которых может быть различна; различным расположением тележек с ограничителями. 9 ограничивающих величину хода или полухода желоба с материалом. Изобретение обеспечивает расширение технологических возможностей путем изменения ускорения и скорости перемещения желоба, а также возможности изменения его хода, т.е. путем изменения производительности.
21
20.
Фиг. 2
23
24
Фиг.З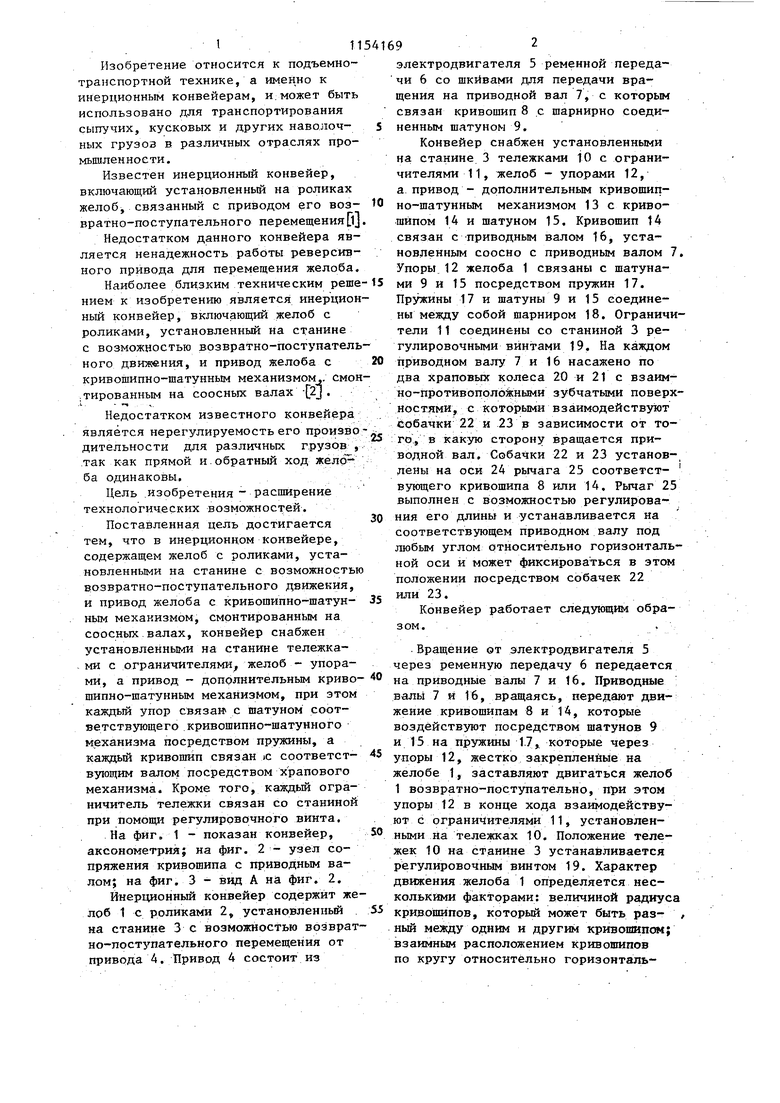
| название | год | авторы | номер документа |
|---|---|---|---|
| Пульсирующий конвейер с регулируемым шагом | 1981 |
|
SU988691A1 |
| ЛЕСОПИЛЬНАЯ РАМА | 1993 |
|
RU2084331C1 |
| Инерционный конвейер | 1987 |
|
SU1459982A1 |
| Шаговый конвейер | 1980 |
|
SU967906A1 |
| АВТОМАТ ПРОВОЛОЧНО-ГВОЗДИЛЬНЫЙ | 1974 |
|
SU376989A1 |
| Устройство для резки бруса из пластичного материала | 1985 |
|
SU1342742A1 |
| Механический пресс | 1989 |
|
SU1632788A1 |
| Плоскопрокатное устройство для поперечно-клиновой прокатки | 1988 |
|
SU1569066A1 |
| ЛОБЗИКОВЫЙ СТАНОК | 1991 |
|
RU2038954C1 |
| Грейферный перекладчик к штамповочному прессу | 1983 |
|
SU1159699A1 |
1. ИНЕРЦИОННЫЙ КОНВЕЙЕР, содержащий желоб с роликами, установленный на станине с возможностью возвратно-поступательного движения, и привод желоба с кривошипно-шатунным механизмом, смонтированным на соосных валах, отличающи йс я тем, что, с целью расширения технологических возможностей, конвейер снабжен установленными на станине тележками с ограничителями, желоб-упорами, а привод - дополнительным кривошипно-шатунным механизмом, при этом каждый упор связан с шатуном соответствующего кривоашпно-шатунного механизма при помощи пружины, а каждый кривошип с соответствующим валом посредством храпового механизма. 2. Конвейер по п. 1, о т л йW чающийся тем, что каяодый ограничитель тележки связан со станиной при помощи регулировочного винта .
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Спйваковский А.О | |||
| идр | |||
| Транспортирующие машины | |||
| М., Машгиз, 1955, с | |||
| Упругая металлическая шина для велосипедных колес | 1921 |
|
SU235A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Спйваковский А.О | |||
| и др | |||
| Транспортирующие машины | |||
| М., Машгиз, 1955, с | |||
| Разборное колесо | 1921 |
|
SU370A1 |
