Изобретение относится к подъемно-tpiaHcriopтному машиностроению и может быть использовано в. любой отрасли.
Известно устройство для поворота на заданный угол груза, транспортируемого подвесным конвейером, в котором механизм фиксации выполнен в ввде неподвижного копира с фиксирующими углублениями и взаимодействующих с ним роликов, ось которых связана с поворотным стержнем механизма поворйта, причем участки поверзсности кольцевого копира между фиксирующими углублениями выполнены выпуклыми 1,
Однако данное устройство обеспечивает только поворот подвески, на которой установлен груз.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для ориентированной подачи изделий с отверстием и выступами на поверхности, включающее несущий злемент с захватами и механизм ориентации.
Это устройство производит установку отверстия изделия в заданные координаты, после чего за один (любой) из выступов (которые обязательно должны быть одинако- , выми) в момент передачи изделия производится его разворот с помощью подпружиненного ролика в положение, когда какой-либо (любой) выступ окажется проти13 контрольной отметки 2.
Однако известное устройство позволяет осуществить поворот транспортируемых изделий только в угловых координатах и при зтом только тех изделий, у которых выступы на поверхности имеют одинаковую форму и расположены эквидистантно. Тем самым существенно снижаются технологические возможности устройства.
Целью изобретения является расширение
технологических возможностей путем обеспечения ориентации изделий с произвольно расположенными по поверхности выступами.
Поставленная цель достигается тем, что в устройстве для ориентированной подачи изделий, с отверстием и выступами на поверхности, содержащем несущий злемент с захватами и механизм ориентации, несущий элемент выполнен в виде подвижной каретки с кронщтейнами для установки изделий, а механизм ориентации - в виде смонтированных на подвижной каретке выдвижных, упоров, при этом захваты смонтированы на подвижной каретке при помощи поворотной в вертикальной плоскости пластформы.
На фиг. 1 изображено устройство, общий вид; на фиг. 2 - изделие, поворотные и выдвижные упоры, план ; на фиг. 3 разрез А-А на фиг. 2 (повернуто); на
фиг. 4 разрез Б-Б на фиг. 2 (повернуто).
Устройство состоит из портала 1 с направляющими 2, несущего элемента в виде подвиной каретки 3 с кронштейнами 4, поворотной платформы 5 с ориентирующими поворотными захватами 6, механизм ориентации в виде выдвижных упоров 7 и 8, установленных на подвижной каретке 3, датчиков 9 и 10, расположенных на портале 1, датчиков 11-16, расположенных на каретке 3.
Устройство работает следующим образом.
Изделие 17 перегружается с транспортного средства 18 на кронштейны 4 при подьеме каретки 3, который начинается по сигналу датчика 19 и прекращается при срабатывании датчика 9, од1говремепно дающего .сигнал на поворот платформы 5.
При повороте платформы 5 захваты 6 заходят внутрь отверстия 20 изделия 17 с зазоро определяемым точность . съема изделия 17 с транспортного средства 18. Поворот платформ 5 прекращается при срабатывании датчика 13. который одновременно дает сигнал на раскры тие (поворот) захватов 6. При раскрытии захватов 6 происходит перемеи1ение изделия 17 на кронцггейнах 4 с целью установки отверстия 20 в требуемое положет1е.
Раскрытие захватов 6 прекращается при срабатывании дат11ика 15, который одновременно дает сигнал на выдвижение упоров 7 и 8, которые, воздействуя на расположенные против 1ШХ выступы 21 к 22 изделия 17, поворачивают изделие 17 относительно центра отверстия 20 в требуемое положение.
Выдвижение упоров 7 н 8 прекращается при срабатывании датчика 11, который одновременно дает сигнал на обратный ход (поворот) платформы 5 и иа возврат захватов 6 и упоров 7 и 8 в исходное оложение. Контроль возврата поворотной платформы 5 в исходное положение фиксируется датчиком 14,. возврат поворо.тн. ,х захватов 6 в исходное положение фиксируется датчиком 16, а возврат вьщвижных упоров 7 и 8 в исходное положение фиксируется датчиками 12.
При, срабатывании датчиков 12-16 выдается сигнал на опускание каретки 3, в ходе которого изделие 17 устанавливается на приемное средство 23. Опускание каретки 3 прекращается по сигналу датчика 10, который одновременно даёт сигнал на перемещение приемного средства 23 для дальнейшей передачи.
На этом цикл работы устройства заканчивается.
Привод поворота платформы 5, захватов 6 к упоров 7 и 8 может быть осуществлен, например, с по.мощью пневмоцшгиндров. 3 Привод подъема (опускания) каретки 3 может быть осуществлен, например с покривошнгшо-шатунного механизмощьюма.
лгрование независимо от копфнгу)ацки пьгстушп н их расположения относительно отверстия изделия. П5 176j Исиользовапие прсдлагае- ого ycTj oiirnx чх; воляет осзществить при передаче изделий их 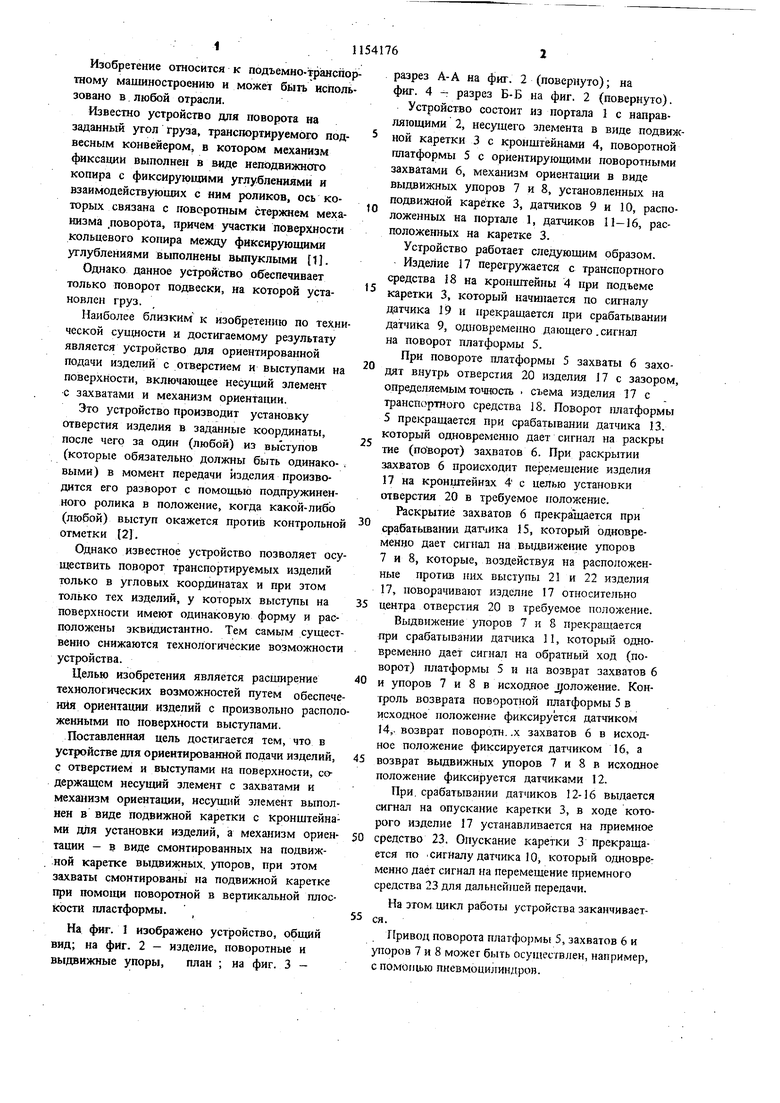

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗГОТОВЛЕНИЯ ЦИЛИНДРИЧЕСКИХ ИЗДЕЛИЙ ТИПА ЧЕРВЯЧНЫЙ ХОМУТ И ПОЛУАВТОМАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2445180C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |
| Устройство для вырубки изделий из резины | 1976 |
|
SU735421A1 |
| Устройство кривовязюков для вырубкизАгОТОВОК из пОлОСОВОгО илЕНТОчНОгО МАТЕРиАлА | 1979 |
|
SU804501A1 |
| Устройство для автоматического расцепления вагонов движущихся поездов | 2018 |
|
RU2700208C1 |
| ПУСКОВАЯ УСТАНОВКА ПОДВОДНОЙ ЛОДКИ | 2018 |
|
RU2684342C1 |
| Устройство для подачи ящиков с откидными крышками и их закрывания | 1985 |
|
SU1333612A1 |
| Устройство для вырубки изделийиз РЕзиНы | 1977 |
|
SU812592A2 |
| Сварочная установка | 1975 |
|
SU556919A1 |
| Устройство для выдачи билета и сдачи | 1979 |
|
SU868800A1 |

УСТРОЙСТВО ДЛЯ ОРИЕНТИЮВАННОЙ ПОДАЧИ ИЗДЕЛИЙ С ОТВЕРСТИНвйраЛяемие движения каретки. ЕМ И ВЫСТУПАМИ НА ПОВЕРХНОСТИ, содержащее несущий элемент с захватами л механизм ориентации, отличающееся, тем, i. что, с целью расщирения тете- нологических возможностей устройства за счет обеспечения ориентации изделий с проиэвольно расположенными на поверхности выступами, несущий элемент выполнен в виде подвижной каретки с кроищтейнами для установки изделий, а механизм орнентбпяи - в виде смонтированных на подвижной каретке выдвижньтх упоров, при этом захваты смонтированы на подвижной каретке при помощи поворотной в вертикальной плос кости платформы. СП Ч 9д гз
Направление дВитенил noSopomHbix ynopoS
Напрабленас д8и кеная поворотной платформы
ФигЛ
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для поворота на заданный угол груза,транспортируемого подвесным конвейером | 1975 |
|
SU560799A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ ориентирования изделий с центральным отверстием и выступами на поверхности | 1979 |
|
SU870292A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
