1
Изобретение относится к погрузочным машинам, конкретнее к погрузочным машинам непрерывного действия.
Цель изобретения - повышение производительности путем автоматического регулирова 1ия скорости рабочего хода машины в зависимости от количества горной массы на конвейере.
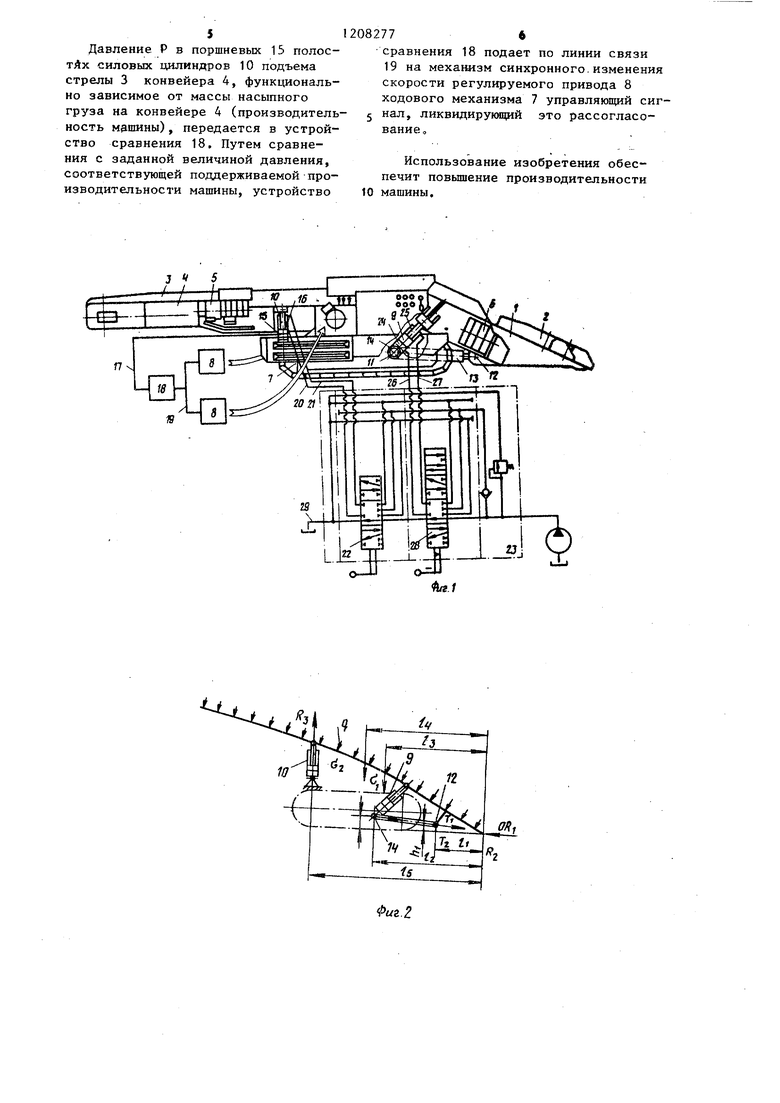
На фиг. 1 изображена погрузочная машина, вид сбоку; на фиг. 2 - схема сил, действующих на погрузочное оборудование при погрузке горно массы; на фиг. 3 - механизмы сравнения и управления .гидроприводами ходового механизма на фиг. 4 - механизмы сравнения и управления электроприводами ходового механизма
Погрузочная машина включает корпус 1, на котором установлен рабочий орган 2, стрелу 3 конвейера 4, приводы 5 и 6 конвейера 4 и рабочег органа 2, ходовое устройство 7 с регулируемым приводом 8, силовые и;илиндры корпуса 9 и силовые цилиндры 10 подъема стрелы 3 конвейера 4, поперечную балку 11. На корпусе 1 с помош,ью шарниров 12 закре1шены тяги 13, а концы поперечной балки 11 шарнирно соединены С корпусом 1 силовыми цилиндрами корпуса 9 и тягами 13, причем оси шарниров 14 тяг 13 и оси п арниров (не показаны) силовых цилиндров корпуса Э совмещены. Поршневые 15 и штоковые
16полости силовых цилиндров 10 подъема стрелы 3 конвейера 4 соединены посредством линий управления
17через механизм сравнения 18, выполненный в виде гидроцилиндра управления с подпружиненным штоком, который соединен линией связи 19 с элементами (не показаны) механизмов регулирования скорости привода 8, При этом поршневые 15 и штоковые
16 полости силовых цилиндров 10 подъема стрелы 3 конвейера 4, сооб- шенные напорными линиями 20 и 21, перекрыты трехпозиционным золотником 22 гидрораспределителя 23,- а поршневые 24 и штоковые 25 полости силовых цилиндров корпуса 9 соединены посредством напорных линий 26 и 27 через четырехпозиционньш золотник 28 со сливной линией 29 - плавающее положение носка рабочего органа 2 (на фиг. 1 показгшо нейтральное положение четырехпози- БЯОнного золотника 28). Для плаваю082772
шего положения золотника 28 необ- кодимо переместить в крайнее нижнее фиксированное п оложение.
Механизм сравнения 18 (фиг. 3)
5 выполнен в виде гидроцилиндра с
подпружиненным штоком, пружина которого удерживает механизмы управления регулируемого гидропривода левой и правой гусениц. Каждьй меха10 низм управления гусеницами содержит следящий золотник 30, управляемые гидро цилиндром 31, связанным с наклонной щайбой насоса 32, в положении максимальной рабочей скорости
15 машины. В поршневую полость гидроцилиндра механизма сравнения 18 по линии связи 17 подводится давление Р управления, противодействую
щее усилию пружины, Р
микс
уменьшает
рабочую скорость машины до минимального значения.
Линия связи 19 (фиг. 1 и 3) включает зубчато-реечную передачу 33, рейка которой связана со щтоком гидроцилиндра механизма сравнения 18, а вал зубчатого колеса через муфту 34 связан с валом зубчато-реечной передачи 35s рейка которой связана со штоком следящего золот- ника 30 гидрораспределителя.
При изменении количества горной массы на конвейере шток гидроцилиндра механизма сравнения 18 перемещается и соответственно перемещается золотник 30 гидрораспределителя, при этом гидроцилиндр 31, воздействуя на наклонную шайбу насоса 32, меняет его производительность, в результате чего рабочая скорость машины изменяется Машина с механизмами частотного управления асинхронными электроприводами левой и правой гусениц содержит потенцио- I leTp 36, преобразователь частоты 37 и электродвигатель 38.
Линия связи 19 (фиг. 1 и 4) при регулируемом электроприводе включающей зубчато-реечную передачу 39, рейка которой связана со штоком механизма сравнения 18, а вал зубчатого колеса через муфту 40 связан с валом потенциометра 36.
Перемещение штока гидроцилиндра механизма сравнения 18 преобра
зуется в потенциометре в сигнал управления - напряжение U бесконтактной системой регулируемого электропривода.
Линии связи 19 (фиг. 3 и 4) позволяют переход с ручного или ножного независимого управления каждой гусеницей ходового механизма на автоматическое синхронное управление обеими,гусеницами при погрузке горной массы в транспортное средство и обратно. При ручном или ножном управлении используют рукоятки или педали 41 и 42, при этом муфты 34 и 40 должны быть разъединены.
Шарниры 12 и 14 тяг 13 расположены так (фиг. 2), что отношение их расстояний i/g по горизонтали до передней рабочей кромки носка рабочего органа .2, находящегося на уровне опорной поверхности ходового механизма 7, равно отношению соот- „ ь.
ветствующих их расстоянии -т- по
HI
вертикали до опорной поверхности
« . h,
ходового механизма, т. е.
е.
г Ьг
Указанное расположение шарниров тяг 13 позволяет давление Р в поршневых 15 полостях силовых цилиндров 10 подъема стрелы 3 конвейера 4 использовать в качестве датчика и источника энергии для регулирования рабочей скорости внедрения машины в навал горной массы в зависимости от количества насыпного груза на конвейере « , т.е. р и (j связаны между собой функциональной зависимостью Р Р (l) .
На погрузочное оборудование при погрузке горной массы действуют (фиг. 2) масса погрузочного оборудования Q ; масса насьтного груза на конвейере Q j б где ). - линейная масса насыпного груза, 8 - длина конвейера , сила тяги 13 Р, , приложенная к шарниру 14, и ее составляющие Т, Р, co5ci и T.J приложенные к шарниру 12 горизонтальная R , и вертикальная R реакции навала; реакция на штоках двух силовых цилиндров 10 подъема стрелы 3 конвейера 4 R, P2F, где Р - давление в поршневых 15 полостях силовых цилиндров 10 подъема стрелы 3 конвейера 4, F - рабочая площадь Поршня.
Уравнение моментов всех сил (фиг, 2)относительно нулевой точки (передней рабочей кромки носка заборной части) имеет вид
-Ci,e,,TrejatR,,
1208277
Откуда реакция на штоках силовых цилиндров 10 подъема стрелы 3 конвейера 4
R,--Q,,,e4-b,T,aj2/B5
Так как плечи В, и h, сил и силы Т, и Тз являются катетами подобных треугольников, можно записать
10
Ь, Т-г .
Y h,T, e,T.j
тогда
Q,E,C,J4
е
Una Q,e,.5
:п,
в правой части равенства все величины кроме а являются постоянными, а величина (| - переменная (линейная масса насыпного угруза на конвейере). Следовательно, Р и q связаны между собой функциональной зависимостью Р Р (ч), но так
как производительность машины П 3,6 ( V (т/ч), скорость к онвейе- ра V Const, то Р Р (П), т.е. давление в штоковых полостях Р силовых цилиндров 10 подъема стрелы 3 конвейера 4 и производительность машины П связаны между собой функциональной зависимостью
При вышеуказан.ном расположении шарниров 12 и 14 и соединении полостей силовых цилиндров корпуса 9
давление Р в поршневых 15 полостях силовых цилиндров 10 подъема стрелы 3 конвейера 4 можно использовать в качестве датчика для регулирования рабочей скорости внедрения машины в
навал горной массы с целью автоматического поддержания производительности машины в оптимальном режиме.
Для обеспечения такого режима ра- боты.машины поршневые 15 полости силовых цилиндров 10 подъема стрелы 3 конвейера 4 сообщаются линией управления 17 через механизм сравнения 18 и связь 19 с регулируемым риводом 8 ходового механизма 7.
Погрузочная машина работает ледующим образом.
Под действием силы тяги рабочий рган 2 внедряется в навал горной ассы, отделяет часть горной
ассы из навала и нагребает на конейер 4, который перемещает ее в ранспортное средство.
Давление Р в поршневых 15 полос- тАх силовых цилиндров 10 подъема стрелы 3 конвейера 4, функционально зависимое от массы насыпного груза на конвейере 4 (производительность машины), передается в устройство сравнения 18. Путем сравнения с заданной величиной давления, соответствующей поддерживаемой производительности машины, устройство
2082774
сравнения 18 подает по линии связи 19 на механизм синхронного.изменения скорости регулируемого привода 8 ходового механизма 7 управляющий сиг- 5 «ал, ликвидирукиций это рассогласование.
Использование изобретения обеспечит повышение производительности 10 машины.

| название | год | авторы | номер документа |
|---|---|---|---|
| Погрузочная машина | 1984 |
|
SU1155781A1 |
| Погрузочная машина | 1983 |
|
SU1155779A1 |
| Погрузочная машина | 1983 |
|
SU1157267A1 |
| Рабочий орган погрузочной машины | 1990 |
|
SU1795122A1 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК С ЭНЕРГОСБЕРЕГАЮЩИМ ГИДРОПРИВОДОМ ПОГРУЗОЧНОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2306389C2 |
| Погрузочная машина | 1982 |
|
SU1084468A1 |
| Механизм подъема и сбрасывания ударного рабочего органа забойного дробильно-погрузочного агрегата | 1981 |
|
SU985322A1 |
| Рабочий орган погрузочной машины | 1985 |
|
SU1314126A1 |
| Рабочий орган погрузочной машины /его варианты/ | 1984 |
|
SU1218146A1 |
| Рабочий орган погрузочной машины | 1988 |
|
SU1640453A1 |


34 5
-7
Я И/7 ff-r
18
(Риг,3
го
ВНИИПИ Заказ 220/44 Тираж 436 Подписное Филиал 1ШП Патент, г.Ужгород, ул.Проектная, 4
(риг.
| Погрузочная машина непрерывного действия с боковым захватом | 1976 |
|
SU605990A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Погрузочная машина | 1981 |
|
SU962484A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
