ел
эо со
41
it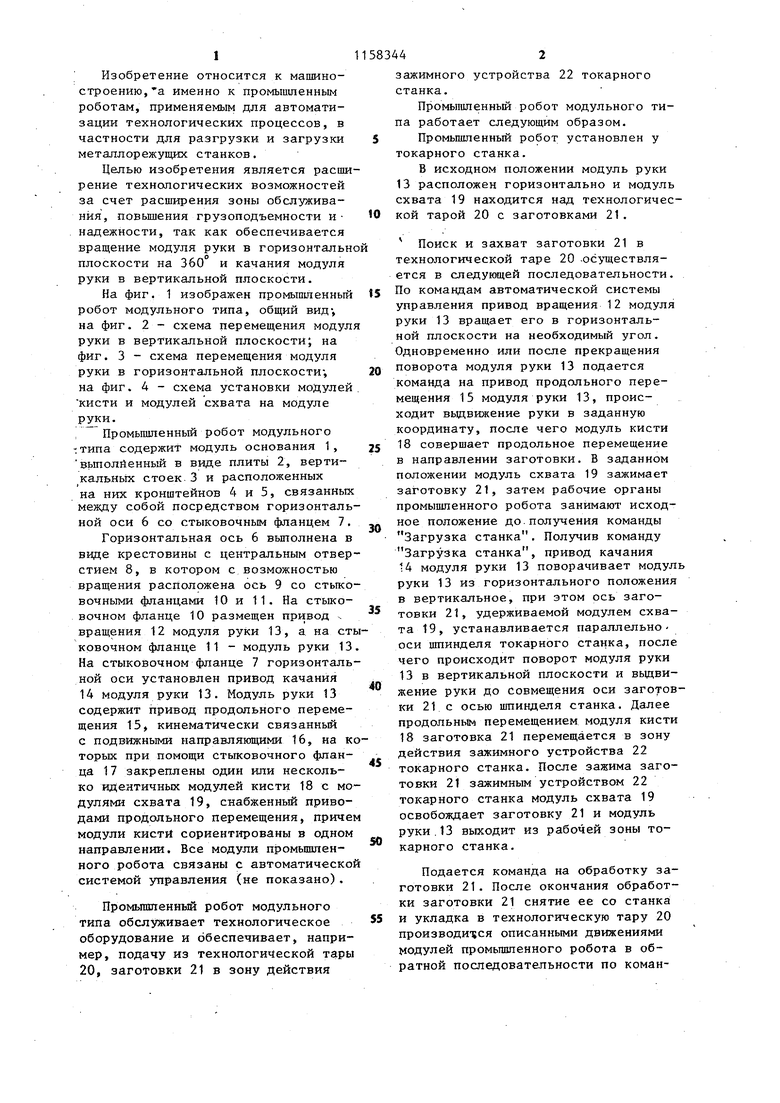
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс | 1986 |
|
SU1425036A1 |
| Автоматизированная технологическая единица | 1977 |
|
SU659375A1 |
| Захватное устройство | 1987 |
|
SU1530437A1 |
| Автоматизированная технологическая единица | 1985 |
|
SU1240577A1 |
| Робот к листоштамповочному прессу | 1976 |
|
SU565818A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| Гибкий производственный модуль | 1987 |
|
SU1541017A1 |
| АДАПТИВНЫЙ МОБИЛЬНЫЙ ПРОСТРАНСТВЕННЫЙ РОБОТ-МАНИПУЛЯТОР ДЛЯ ПРОТЕЗИРОВАНИЯ ВЕРХНЕЙ КОНЕЧНОСТИ ПАЦИЕНТА И СПОСОБ ОБСЛУЖИВАНИЯ ПАЦИЕНТА ПОСРЕДСТВОМ АДАПТИВНОГО МОБИЛЬНОГО ПРОСТРАНСТВЕННОГО РОБОТА-МАНИПУЛЯТОРА | 2020 |
|
RU2738859C1 |
| Промышленный робот | 1990 |
|
SU1756142A1 |
| Промышленный робот | 1982 |
|
SU1125127A1 |
ПРОМЫШЛЕННЫЙ РОБОТ МОДУЛЬНОГО ТИПА, содержащий имеющие стыковочные фланцы, модули основания, руки и схвата, приводы вращения, качения и продольного перемещения руки, кистии схвата, отличающийся тем, что, с целью расширения технологических возможностей 18 13 иы,а.я,. ..tv... за счет распирения зоны обслуживания, повышения грузоподъемности и надежности, модуль основания выполнен в виде плиты с вертикальными стойками и расположенными на них кронштейнами, связанными между собой.посредством горизонтальной оси с фланцем, выполненной в виде крестовины с центральным отверстием, в котором с возможностью вращения расположена ось со стыковочными фланцами, на одном из. которых размещен привод вращения руки, а на другом - модуль руки, при этом на фланце горизонт ьной оси установлен привод качания модуля руки. (Л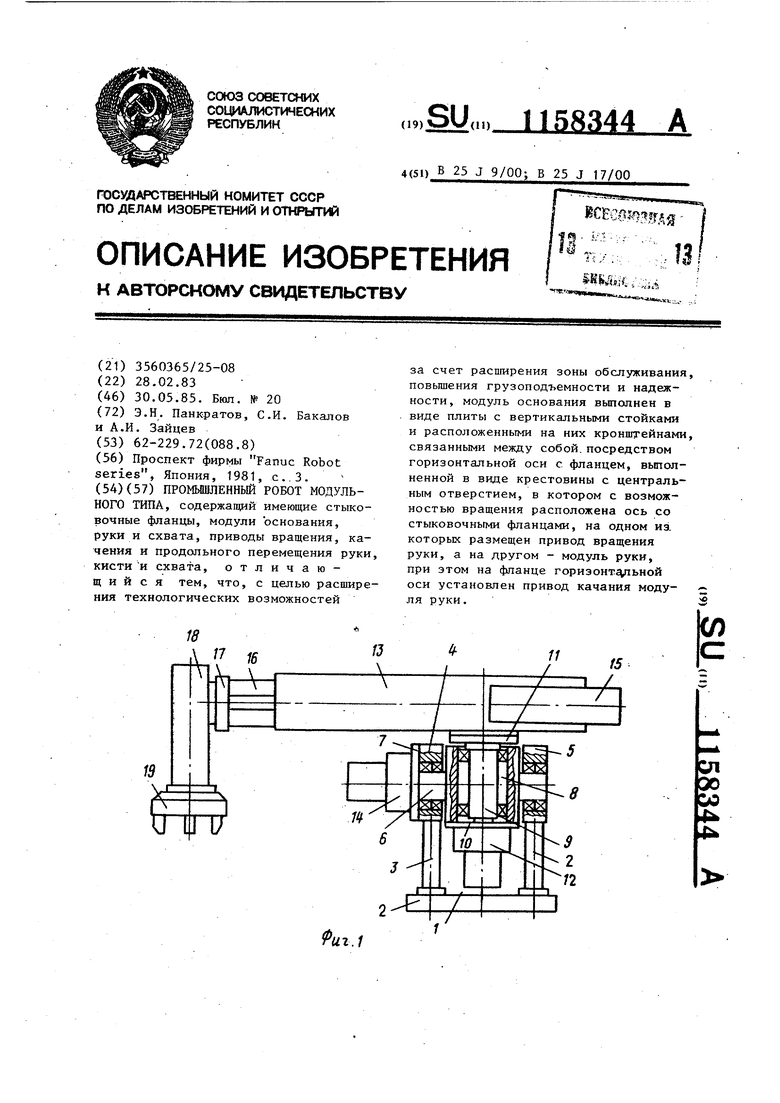
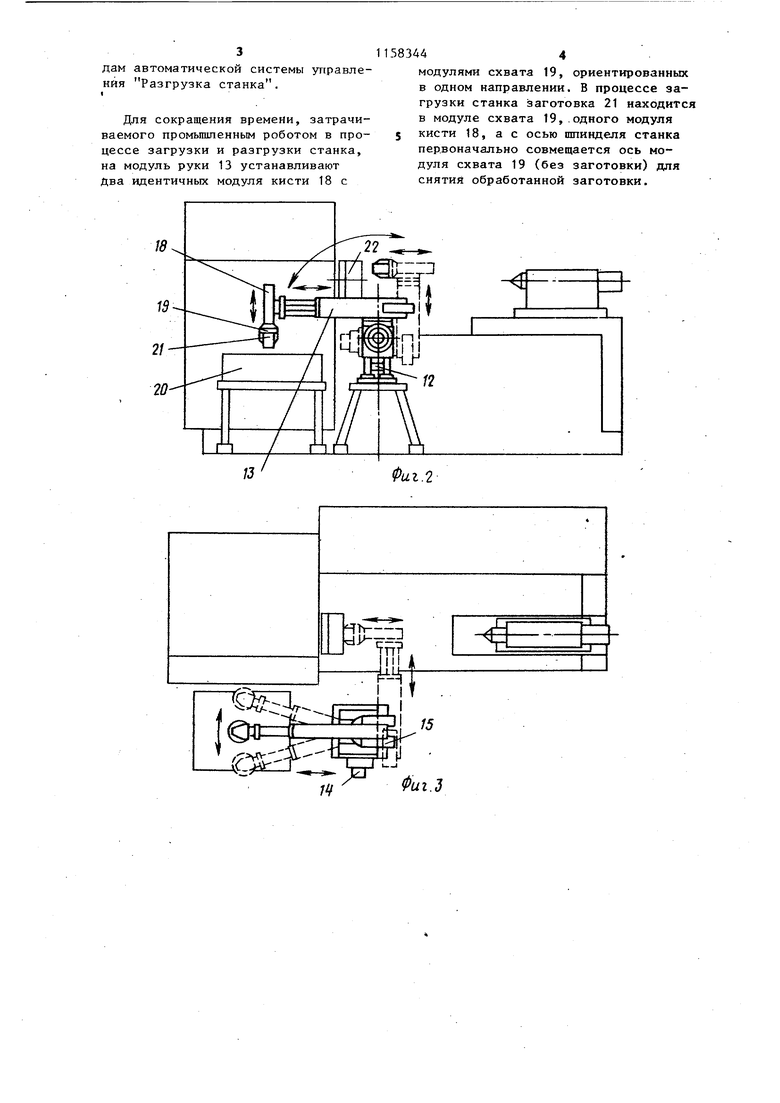
иг.1 1 Изобретение относится к машиностроению, а именно к промышленным роботам, применяемым для автоматизации технологических процессов, в частности для разгрузки и загрузки металлорежущих станков. Целью изобретения является расши рение технологических возможностей за счет расширения зоны обслуживания, повышения грузоподъемности инадежности, так как обеспечивается вращение модуля руки в горизонтальн плоскости на 360 и качания модуля руки в вертикальной плоскости. На фиг. 1 изображен промышленный робот модульного типа, общий вид; на фиг. 2 - схема перемещения модул руки в вертикальной плоскости; на фиг. 3 - схема перемещения модуля руки в горизонтальной плоскости; на фиг. 4 - схема установки модулей кисти и модулей схвата на модуле руки. ,Промьшшенный робот модульного г типа содержит модуль основания 1, вьтолйенный в виде плиты 2, верти кальньгх стоек 3 и расположенных на них кронштейнов 4 и 5, связанных между собой посредством горизонталь ной оси 6 со стыковочным фланцем 7, Горизонтальная ось 6 выполнена в виде крестовины с центральным отвер стием 8, в котором с возможностью вращения расположена ось 9 со стыко вочными фланцами 10 и 11. На стыковочном фланце 10 размещен привод . вращения 12 модуля руки 13, а на ст ковочном фланце 11 - модуль руки 13 На стыковочном фланце 7 горизонталь ной оси установлен привод качания 14 модуля руки 13. Модуль руки 13 содержит привод продольного перемещения 15, кинематически связанньм с подвижными направляющими 16, на к торых при помощи стыковочного фланца 17 закреплены один или несколько идентичных модулей кисти 18 с мо дулями схвата 19, снабженный приводами продольного перемещения, приче модули кисти сориент1фованы в одном направлении. Все модули промьшшенного робота связаны с автоматическо системой управления (не показано). Промьгатенный робот модульного типа обслуживает технологическое оборудование и обеспечивает, например, подачу из технологической тары 20, заготовки 21 в зону действия 4 зажимного устройства 22 токарного станка. Промышленньй робот модульного типа работает следующим образом. Промьшшенный робот установлен у токарного станка. В исходном положении модуль руки 13расположен горизонтально и модуль схвата 19 находится над технологической тарой 20 с заготовками 21. Поиск и захват заготовки 21 в технологической таре 20 .осуществляется в следующей последовательности. По командам автоматической системы управления привод вращения 12 модуля руки 13 вращает его в горизонтальной плоскости на необходимый угол. Одновременно или после прекращения поворота модуля руки 13 подается команда на привод продольного перемещения 15 модуля руки 13, происходит выдвижение руки в заданную координату, после чего модуль кисти 18 совершает продольное перемещение в направлении заготовки. В заданном положении модуль схвата 19 зажимает заготовку 21, затем рабочие органы промышленного робота занимают исходное положение до.получения команды Загрузка станка. Получив команду Загрузка станка, привод качания 14модуля руки 13 поворачивает модуль руки 13 из горизонтального положения в вертикальное, при этом ось заготовки 21, удерживаемой модулем схвата 19, устанавливается параллельнооси шпинделя токарного станка, после чего происходит поворот модуля руки 13 в вертикальной плоскости и вьщвижение руки до совмещения оси заготовки 21 с осью шпинделя станка. Далее продольным перемещением модуля кисти 18 заготовка 21 перемещается в зону действия зажимного устройства 22 токарного станка. После зажима заготовки 21 зажимным устройством 22 токарного станка модуль схвата 19 освобождает заготовку 21 и модуль руки. 13 выходит из рабочей зоны токарного станка. Подается команда на обработку заготовки 21. После окончания обработки заготовки 21 снятие ее со станка и укладка в технологическую тару 20 производился описанными движениями модулей промьшшенного робота в обратной последовательности по командам автоматической системы управления Разгрузка станка.
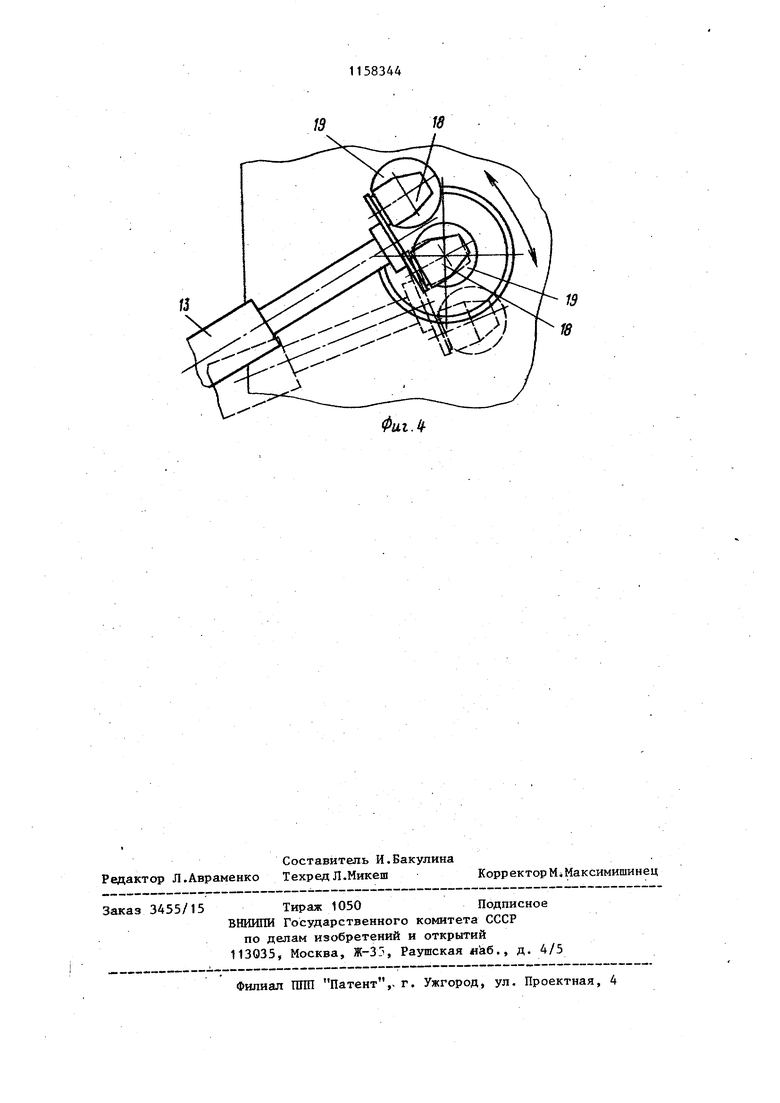
Для сокращения времени, затрачиваемого промьшшенным роботом в процессе загрузки и разгрузки станка, на модуль руки 13 устанавливают Два идентичных модуля кисти 18 с
w
- I
: I /5
11583444
модулями схвата 19, ориентированных в одном направлении. В процессе загрузки станка заготовка 21 находится в модуле схвата 19,.одного модуля 5 кисти 18, ас осью шпинделя станка первоначально совмещается ось модуля схвата 19 (без заготовки) для снятия обработанной заготовки.
Фиг.2
1U
Фиг.З
13
Фиг.
| Проспект фирмы Fanuc Robot series, Япония, 1981, с..3 |
