Изобретение относится к. конвейерам с циклически движущимися грузоносителями, в частности к конвейерам с возвратно-поступательным движением грузоносителей, разъединяемых с грузом при обратном ходе.
Известен шаговый конвейер, содержащий неподвижную раму, подвижную раму, установленную на опорных роликах с возможностью возвратно-поступательного перемещения по горизонтальным направляю щим неподвижной рамы, .копиры, связанные между собой грузовые ролики с осями, закрепленные на неподвижной раме опоры с выступами для грузовых роликов и пружинный механизм 1.
Недостаток этого конвейера состоит , в сложности его конструкции, поскольку он содержит большое количество промежуточных тележек и пружинных механизмов.
Наиболее близким к изобретению по технической сущности из известных является щаговый конвейер, содержащий неподвижную и подвижную рамы и пружинный механизм. Подвижная рама установлена на опорных роликах с возможностью возвратно-поступательного перемещения по горизонтальным направляющим неподвижной рамы. На подвижной раме закреплены копиры, взаимодействующие с грузовыми роликами. На неподвижной раме закреплены кронштейны с выемкой и выступом на каждом из них для взаимодействия с осью грузового ролика, при этом оси соединены между собой посредством планок, щарнирно связанных с неподвижной рамой посредством рычагов. Пружинный механизм одним концом шарнирно соединен со средней частью планок, а другим - с неподвижной рамой 2.
Однако известный конвейер имеет сложную конструкцию, что обусловлено наличием большого количества пружинных механизмов металлоемких планок, рычагов.
Целью изобретения является упрошение конструкции.
Указанная цель достигается тем, что в шаговом конвейере, содержащем неподвижную раму с горизонтальными направляющими, установленную с возможностью возвратно-поступательного перемещения по горизонтальным направляющим подвижную раму, копиры, установленные на осях грузовые ролики, соединенные с осями планки, и кронщтейны с выемкой и выступом на каждом из них, расположенным с возможностью взаимодействия с осью грузового ролика, каждый кронщтейн выполнен с пазом, а каждая планка связана с кронштейном посредством расположенного в пазу кронщтейна пальца, при этом копиры закреплены на неподвижной раме, а кронштейны - на подвижной.
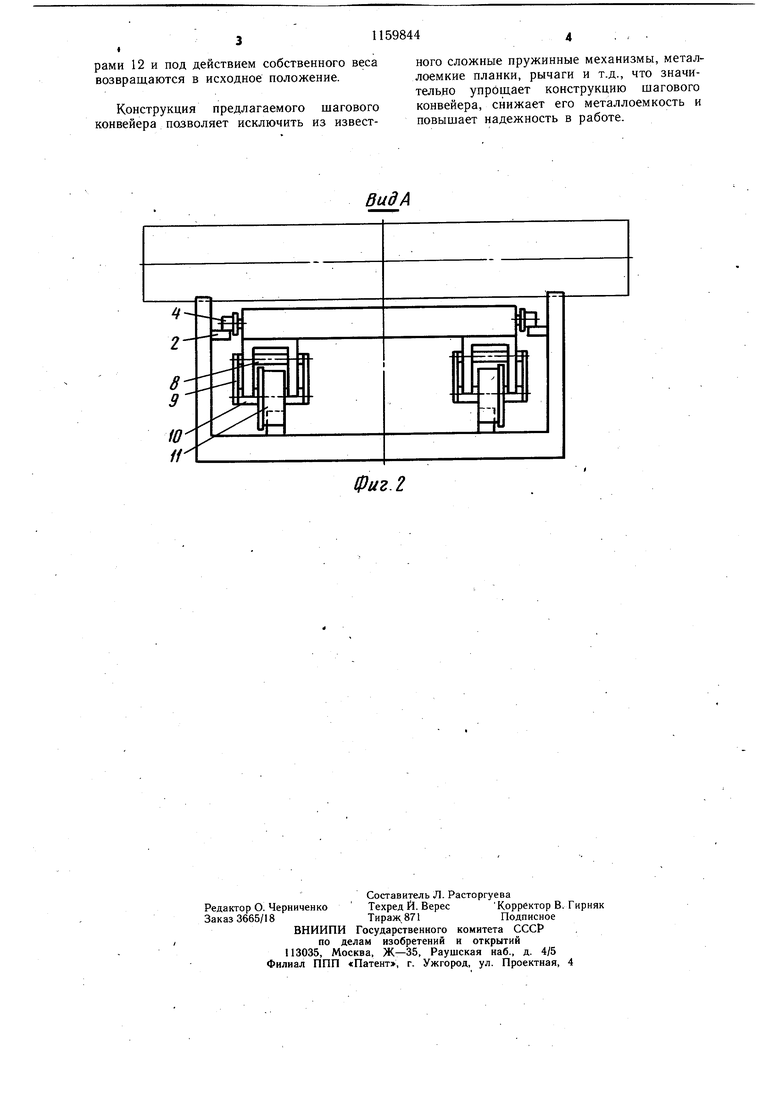
На фиг. 1 изображен предлагаемый шаговый конвейер, вид сбоку; на фиг. 2 - вид А на фиг. 1.
Шаговый конвейер содержит неподвижную раму 1 с горизонтальными направляющими 2, на которых установлена подвижная рама 3 с опорными роликами 4, связанная тягой 5 и приводом горизонтального перемещения (не показан). На подвижной раме
3жестко закреплены кронщтейны б с выступом 7 и выемкой а на каждом из них. Кроме того, в каждом кронштейне 6 выполнен паз в, в котором свободно расположен палец 8, связанный посредством планки 9 с осью 10 грузового ролика 11. Грузовые
5 ролики 11 взаимодействуют с копирами 12, закрепленными на неподвижной раме 1. При этом выступ 7 и поверхность выемки а расположены с возможностью взаимодействия с осью грузового ролика.
0 Шаговый конвейер работает следую. щим образом.
В исходном положении (фиг. 1) подвижная рама 3 находится в крайнем левом положении и лежит опорными роликами 4 на горизонтальных направляющих 2. Грузовые ролики 11 при этом под действием собственного веса опущены в крайнее нижнее положение, и оси 10 грузовых роликов 11 находятся под выемками а, но не ниже од0 посторонних выступов 7. При рабочем ходе подвижная рама 3 перемещается тягой 5 вправо на опорных роликах 4 по горизонтальным направляющим 2. При дальнейшем ходе привода грузовые ролики 11, взаимодействуя с копирами 12, поднимаются
вверх. Оси 10 при этом, скользя по односторонним выступам 7, фиксируются в выемках а, а пальцы 8 свободно перемещаются вверх по пазам в. При дальнейшем :взаимодействии копиров 12 с грузовыми ролиг
0 ками 11 подвижная рама 3 поднимается, подхватывая груз, перемещает его и опускает на следующую позицию. Опускаясь, подвижная рама 3 встает опорными роликами 4 на горизонтальные направляющие 2, занимая крайнее правое положение, грузовые ролики 1.1 выходят из взаимодействия с копирами 12 и под действием собственного веса возвращаются в исходное положение, оси 10 при этом выводятся из выемок а.
При обратном, холостом ходе подвижная рама 3 перемещается на опорных роликах
4по направляющим 2 влево, при этом копиры 12, взаимодействуя с грузовыми роликами 11, отклоняют их вправо, не вводя
5 оси 10 в выемки а. Подвижная рама 3, не поднимаясь над неподвижной рамой 1, за нимает исходное положение, грузовые ролики 11 выходят из взаимодействия с копирами 12 и под действием собственного веса возвращаются в исходное положение.
Конструкция предлагаемого шагового конвейера позволяет исключить из известного сложные пружинные механизмы, металлоемкие планки, рычаги и т.д., что значительно упрощает конструкцию шагового конвейера, снижает его металлоемкость и повышает надежность в работе.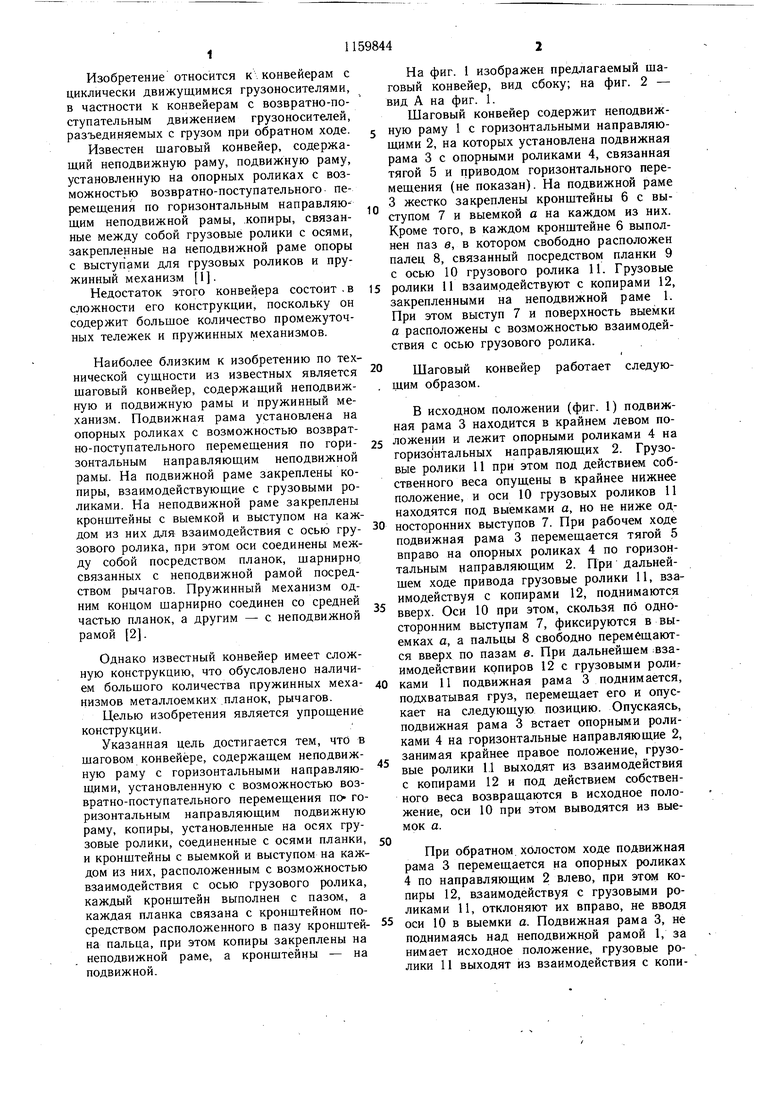
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговый конвейер | 1989 |
|
SU1657453A2 |
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| Шаговый конвейер | 1985 |
|
SU1240695A2 |
| Шаговый конвейер | 1988 |
|
SU1546366A1 |
| Шагающий конвейер | 1986 |
|
SU1452755A1 |
| Шаговый конвейер | 1979 |
|
SU846438A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Шаговый конвейер-накопитель | 1978 |
|
SU770947A1 |
| Шаговый конвейер | 1978 |
|
SU734092A1 |
| Шаговый конвейер | 1990 |
|
SU1794815A1 |
ШАГОВЫЙ КОНВЕЙЕР, содержащий неподвижную раму с горизонтальными направляющими, установленную с возможностью возвратно-поступательного перемещения по горизонтальным направляющим подвижную раму, копиры, установленные на осях грузовые ролики, соединенные с осями планки, и кронштейны с выемкой и выступом на каждом из них, расположенным с возможностью взаимодействия с осью грузового ролика, отличающийся тем, что, с целью упрощения конструкции конвейера, каждый кронщтейн выполнен с пазом, а каждая планка связана с кронштейном посредством расположенного в пазу кронштейна пальца, при этом копиры закреплены на неподвижной раме, а кронштейны - на подвижной. У//////////////////////////////////////7//777, (Л сд 00 / Фи2.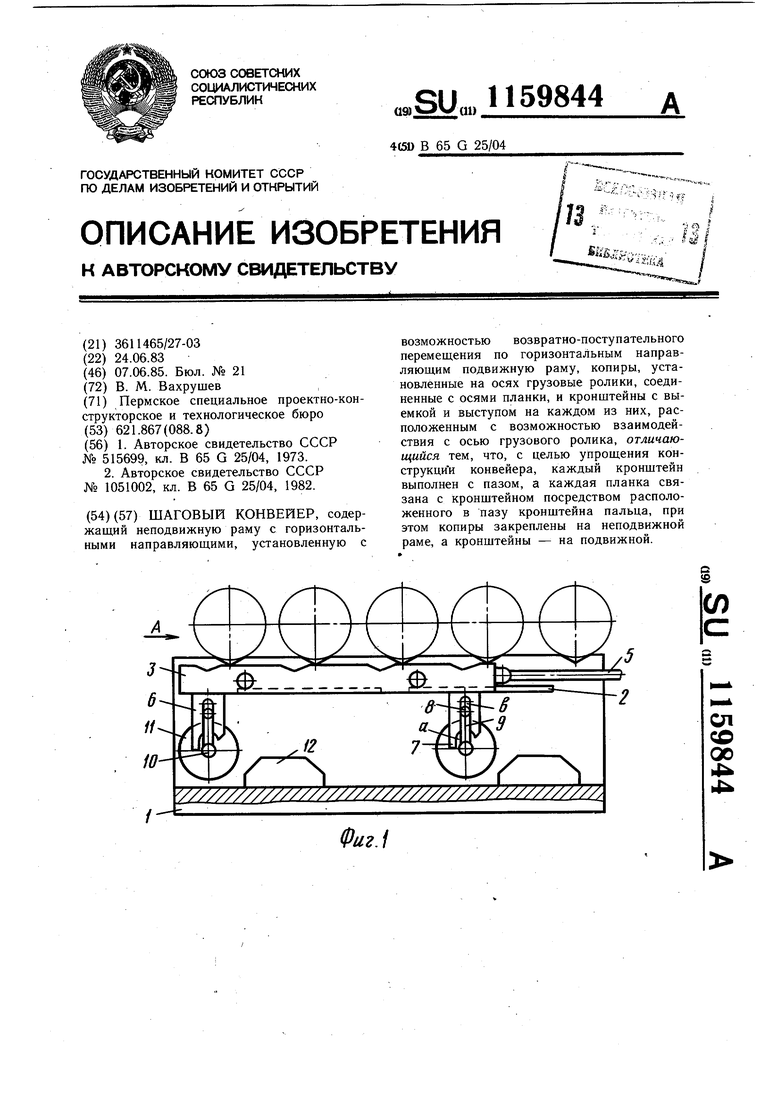
Фиг. 2
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Шаговый конвейер | 1973 |
|
SU515699A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Шаговый конвейер | 1982 |
|
SU1051002A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
