Изобретение относится к машиностроению, а именно к устройствам для захвата и манипулирования деталями с помощью роботов, и может найти преимущественное применение в сборочных роботах.
Цель изобретения - расширение технологических возможностей схвата путем придания губкам колебательного движения, обеспечивающего поисковое движение собираемых деталей типа вал-втулка.
Поставленная цель достигается тем, что схват промышленного робота, содержащий два двуплечих рычага, на одном плече каждого из которых установлены губки, а на другом - постоянные магниты, и привод, выполненный в виде постоянного электромагнита, электромагнит привода снабжен дополнительной обмоткой, имеющей вывод от средней точки, при этом крайние выводы дополнительной обмотки соединены между собой.
На чертеже изображен предлагаемый схват в исходном состоянии, общий вид.
Схват содержит расположенные в корпусе 1 на шарнирах 2 двуплечие рычаги 3, на одном плече каждого из которых установлены губки 4, а на другом - постоянные магниты 5.
В пазу, образованном магнитами 5, установлен электромагнит с обмоткой б и дополнительной обмоткой 7, имеющей отвод от средней точки, а концы ее соединены между собой.
Устройство работает следующим образом. На обмотку 6 подают постоянное напряжение. При этом против каждого из магнитов образуется одноименный полюс электромагнита, вследствие чего хвостовики раздвигаются, а губки 4 сходятся, захватывая деталь. Затем деталь транспортируется на позицию сборки. Достигнув позиции сборки, деталь устанавливается напротив ответной детали. После этого подключают дополнительную обмотку 7 к источнику переменного
напряжения, под действием которого в ней
протекает переменный ток, создающий два
противоположно направленных относительно
середины обмотки электромагнитных потока,
изменяющихся во времени. Эти потоки, накладываясь на поток, создаваемый обмоткой б, в один полупериод переменного напряжения складываются на одном конце электромагнита и вычитаются на другом, а во второй полупериод наоборот.
Параметры обмотки 7 выбраны таким образом, что поток, создаваемый каждой частью этой обмотки, не больше потока, создаваемого обмоткой 6, поэтому полярность электромагнита остается неизменной
и возникают колебания губок схвата в одинаковом направлении.
После возникновения колебаний детали, зажатой в губках, осуществляются ее сближение с ответной деталью и последующая их сборка.
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1984 |
|
SU1248796A2 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| ПРИВОД СХВАТА МАНИПУЛЯТОРА | 2008 |
|
RU2378102C2 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |
| Схват манипулятора | 1985 |
|
SU1255427A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Схват манипулятора | 1990 |
|
SU1785896A1 |
СХВАТ ПРОМЫШЛЕННОГО РОБОТА, содержащий два двуплечих рычага, на одном плече каждого из которых установлены губки, а на другом - постоянные магниты, и привод, выполненный в виде постоянного электромагнита, отличающийся тем, что, с целью расширения его технологических возможностей, электромагнит привода снабжен дополнительной обмоткой, имеющей вывод от средней точки, при этом крайние выводы дополнительной обмотки соединены между собой. / J f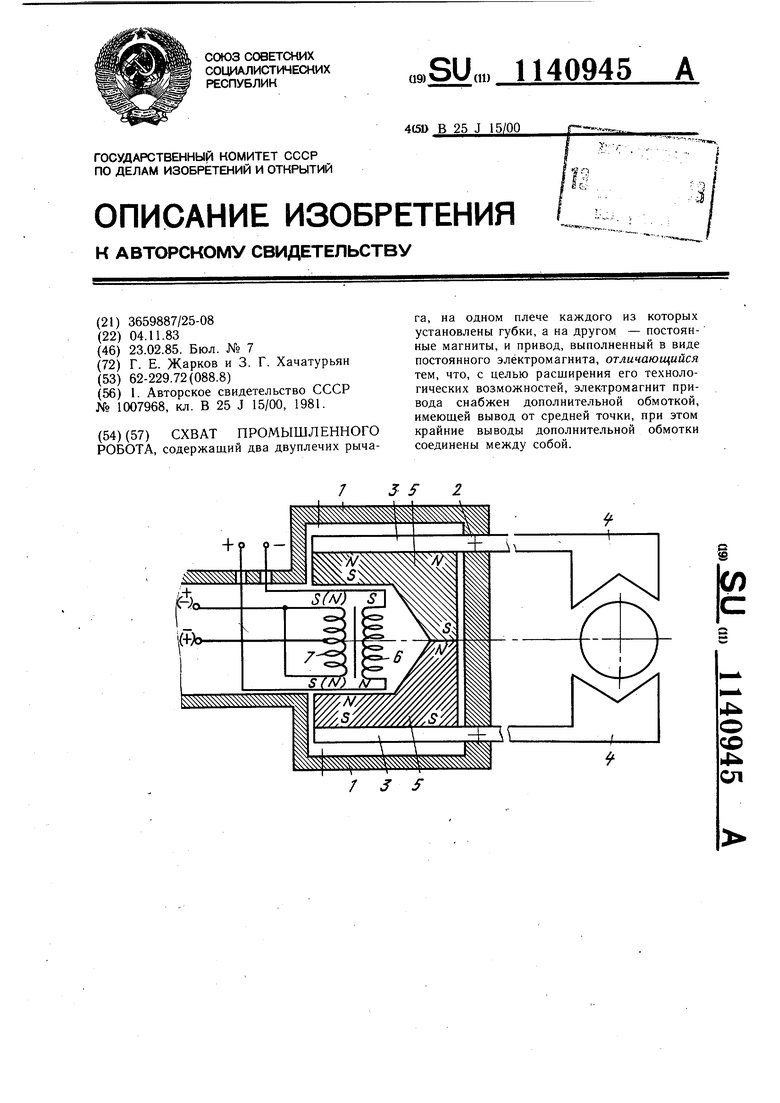
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Захват | 1981 |
|
SU1007968A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
