(5) СХВАТ ПРОМЫШЛЕННОП, ГОьОГА

| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1980 |
|
SU931467A1 |
| Схват манипулятора | 1982 |
|
SU1041286A1 |
| Схват промышленного робота | 1981 |
|
SU1014701A1 |
| Захватное устройство | 1985 |
|
SU1255430A1 |
| Схват манипулятора | 1982 |
|
SU1076278A1 |
| Схват промышленного робота | 1984 |
|
SU1256956A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Очувствленный схват промышленного робота | 1988 |
|
SU1593956A1 |

1
Изобретение относится к машино,строению и может быть использовано при создании автооператоров и промышленных роботов.
Известен схват промышленного робота, содержащий установленные на осях двуплечие рычаги, несущие на одних концах губки, а также связанный с приводом клин, предназначенный для взаимодействия с указанными рычагами. Рычаги связаны между собой пружинойГм.
Применение пружины для возврата рычагов в исходное положение исключает применение схвата в горячих средах, а при малых углах клина возврат рычагов в исходное положение при помощи пружины невозможен. Конструкция не позволяет регулировать ход рычагов, а также изменять положение каждого из рычагов относительно оси симметрии клина, что сокращает типоразмер и номенклатуру зажимаемых деталей. Замыкание губок происходит при толкающем движении штока, которое является менее предпочтительным перед тянущим движением, особенно при длинном штоке.
Цель изобретения - устранение указанных недостатков.
Указанная цель достигается тем, что схват снабжен дополнительным клином, связанным с приводом, при этом оба клина установлены в параллельных плоскостях, лежащих по разные стороны от осей вращения рычагов, а вершины клиньев направлены в проти воположные стороны.
Кроме того, схват может быть снабжен двумя парами регулируемых упоров, установленных на двуплечих рычагах в плоскостях расположения клиньев.
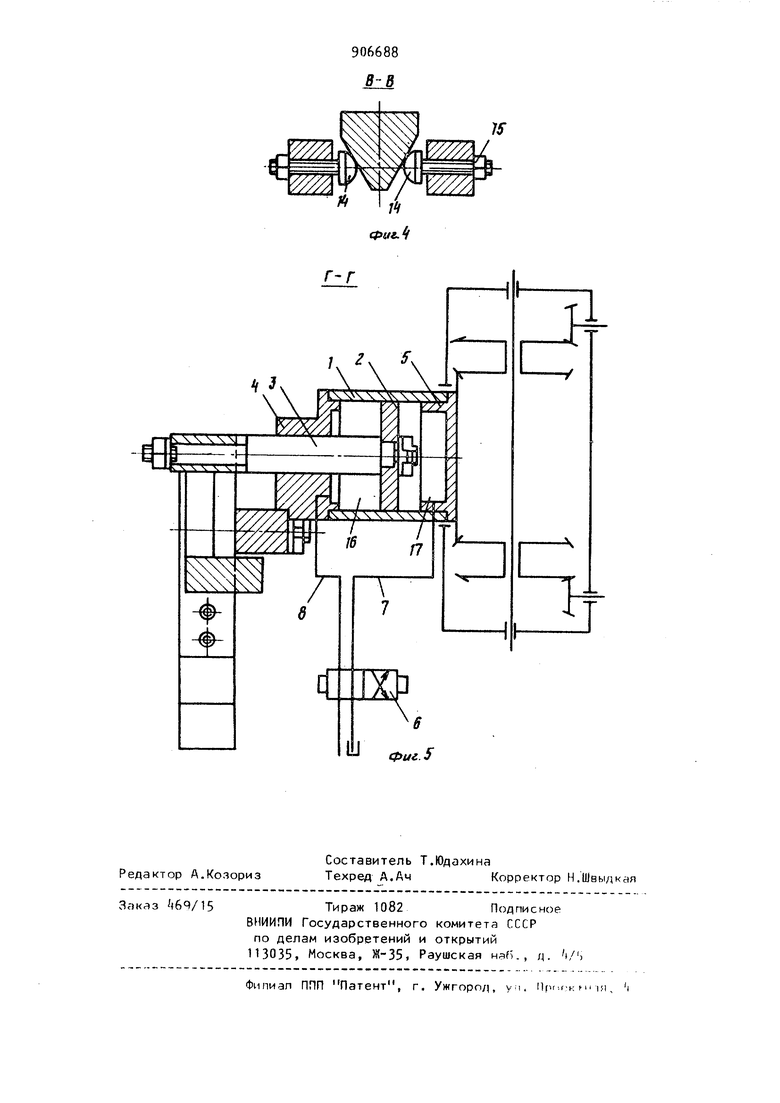
На фиг. 1 представлен схват, вид с торца; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1; на фиг. 5 разрез Г-Г на фиг. 1. Схват промышленного робота содер жит силовой цилиндр, состоящий из гильзы 1, поршня 2, штока 3 и крышек и 5. Золотник 6 соединенный с силовым цилиндром магистралями 7 и 8. На конце штока 3 сидит толкатель 9. В крышке установлены оси 10, на которые насажены рычаги 11 и 12, в которых установлены упоры 13 и И с гайками 15. Схват работает следующим образом При включении золотника 6 энергоноситель по магистрали 8 поступае в полость 16 силового цилиндра, в результате чего поршень 2 со штоком 3 и толкателем 9 перемещается вправ Верхний клин толкателя 9 воздейст вуя на упоры 13, поворачивает рычаги 11 и 12 вокруг осей 10 и происходит зажим детали. При переключении золотника 6 эне гоноситель по магистрали 7 поступает в полость 17 силового цилиндра, в результате чего поршень 2 со ютоком 3 и толкателем-9 перемещается влево. Нижний клин толкателя Э, воз действуя на упоры 1, поворачивает рычаги 11 и 12 вокруг осей 10 и происходит разжим детали. Для изменения положения рычагов 11 или 12 относительно оси штока вывинчивают упор 13 (ввинчивают упор 13), ввинчивают упор 14 (вывинчивают упор ) после чего упоры 13 и 1 фиксируются гайками 15. Для настройки рычагов на зажим требуемой детали, сдвигаем поршень шток 3 и толкатель 9 в крайнее левое положение и, манипулируя упорами 14, устанавливаем размер меж4ду губками рычагов 11 и 12 таким. чтобы можно было подойти губками к зажимаемой детали. При этом упоры 14 касаются нижнего клина толкателя 9, после чего фиксируются гайками 15. Затем, манипулируя упорами 13, выставляют их относительно верхнего клина толкателя 9 с некоторым зазором и фиксируют гайками 15. Применение предлагаемого изобретения позволяет повысить надежность конструкции и упростить ее,зажимать детали большой номенклатуры и типоразмера, и рационально расходовать энергоноситель. Формула изобретения 1 . Схват промьшленного робота, содержащий установленные на осях в корпусе двуплечие рычаги, несущие на одних концах губки, а также связанный с приводом клин, предназначенный для взаимодействия с указанными рычагами, отличающийся тем, что, с целью повышения надежности работы, он снабжен дополнительным клином, связанным с приводом, при этом оба клина установлены в параллельных плоскостях, лежащих по разные стороны от осей вращения рычагов, а вершины клиньев направлены в противоположные стороны. .. Схват по П.1, отличающийся тем, что, он снабжен двумя парами регулируемых упоров, установленных на двуплечих рычагах в плоскостях расположения клиньев. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 582175, кл.- В 25 115/00, 1976.
