1
Изобретение относится к машиностроению, а именно к устройствам для захвата и манипулирования деталями преимущественно в сборных роботах, и является усовершенствованием изобретения по авт. св. № 1140945.
Целью изобретения являет.ся повышение надежности процесса сборки путем обеспечения поискового движения губок по замкнутой линии.
На фиг. f изображен схват, общий вид; на иг. 2 - тр аектории движения губок при равенстве ча стот возвратно-поступательного и колебательного движений; на фиг, 3 - то же, при неравенстве частот возвратно-поступательного и колебательного движений.
Схват промьшленного робота содержит расположенные в корпусе 1. на шарнирах 2 двуплечие рычаги 3, на одном плече каждого из которых установлены постоянные магниты 4, а другое плечо выполнено составным из двух частей 5 и 6 и снабжено приводом возвратно-поступательного перемещения, выполненным в виде электромагнита 7 и подпружиненного к нему в осевом направлении пружиной 8 якоря 9, при этом якорь 9 жестко связан с частью 6, на которой установлена губка 10, а электромагнит 7 .жестко связан с частью 5.
В пазу, образованном магнитами 4 установлен электромагнит с обмоткой 11 и дополнительной обмоткой 12, имеющей отвод от средней точки, а концы ее соединены между собой. Для уменьшения сил трения якори 9 установлены в подшипниках 13.
Схват работает следующим образом
На обмотку 11 электромагнита подают постоянное напряжение, при этом напротив каждого из магнитов 4 образуется одноименный полюс
487962
электромагнита, вследствие чего хвостовики раздвигаются, а губки 10 сходятся, захватывая деталь. Затем деталь транспортируется на позицию
5 сборки и устанавливается напротив ответной детали. После этого подключают дополнительную обмотку 12 к источнику переменного напряжения, под действием которого в ней проте 0 кает переменный ток, создающий два противоположно направленных относительно середины обмотки электромагнитных потока, изменяющихся во времени. Эти потоки, накладываясь на
5 поток, создаваемый обмоткой 11, создает колебание губок в одинаковом . направлении. Далее подают переменное напряжение на обмотки электромагнитов 7, под действием которого якорь
20 9 начинает совершать прямолинейные колебательные движения, передавая эти движения, губкой 10-.
Вращательные колебательные движения, складываясь с прямолинейными
25- колебательными движениями, создают колебательные движения по замкнутой кривой. После этого происходит сбли- .жение. деталей и их сборка.
При равенстве амплитуд слаг.ае-
30 мых колебательных движений траектория движения губок может быть круговой, а при их отличии - эллипти- .ческой (фиг. 2), где Ag - амплитуда линейных колебаний, А - амплитуда
35 качающих колебаний.
При неравенстве частот колебаний, траектория сложного движения представляет собой пересекающуюся кривую с количеством точек пересечения,
40 зависящим от соотношения частот колебаний- линейнь1х fg и качающих f (фиг. 3), где R - радиус окружности, которую описывают губки 10 при обесточенном электромагните 7.
а) о
Фиг. 2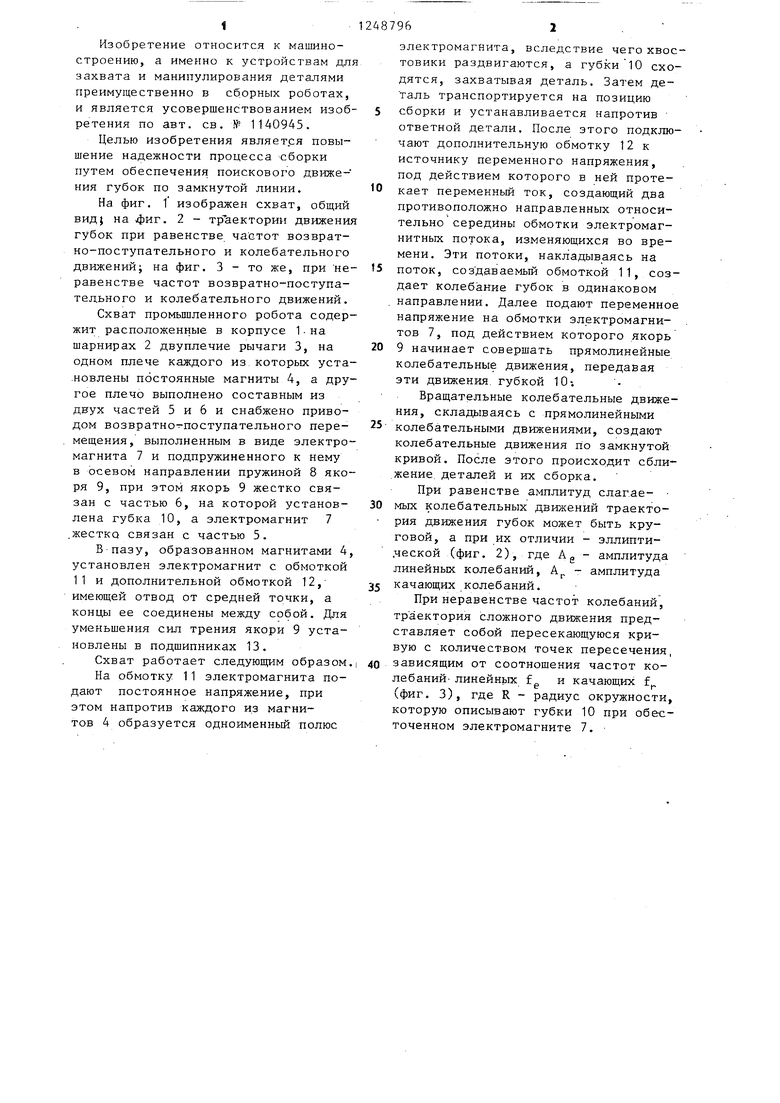
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1140945A1 |
| Схват | 1986 |
|
SU1313700A1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888067A1 |
| Схват для хрупких деталей | 1984 |
|
SU1284827A1 |
| Схват /его варианты/ | 1983 |
|
SU1161374A1 |
| Устройство для установки вала в отверстие | 1988 |
|
SU1657328A1 |
| Схват манипулятора | 1981 |
|
SU982901A1 |
| Захват манипулятора | 1983 |
|
SU1090548A1 |

S) О
.j
Фиг. .
Составитель Ф.Майоров Редактор Р.Цицика. Техред Н.БонкалоКорректор Л.Пилипенко
Заказ 4171/13. Тираж 1031Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Ра ушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород; ул. Проектная, 4
| Схват промышленного робота | 1983 |
|
SU1140945A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
