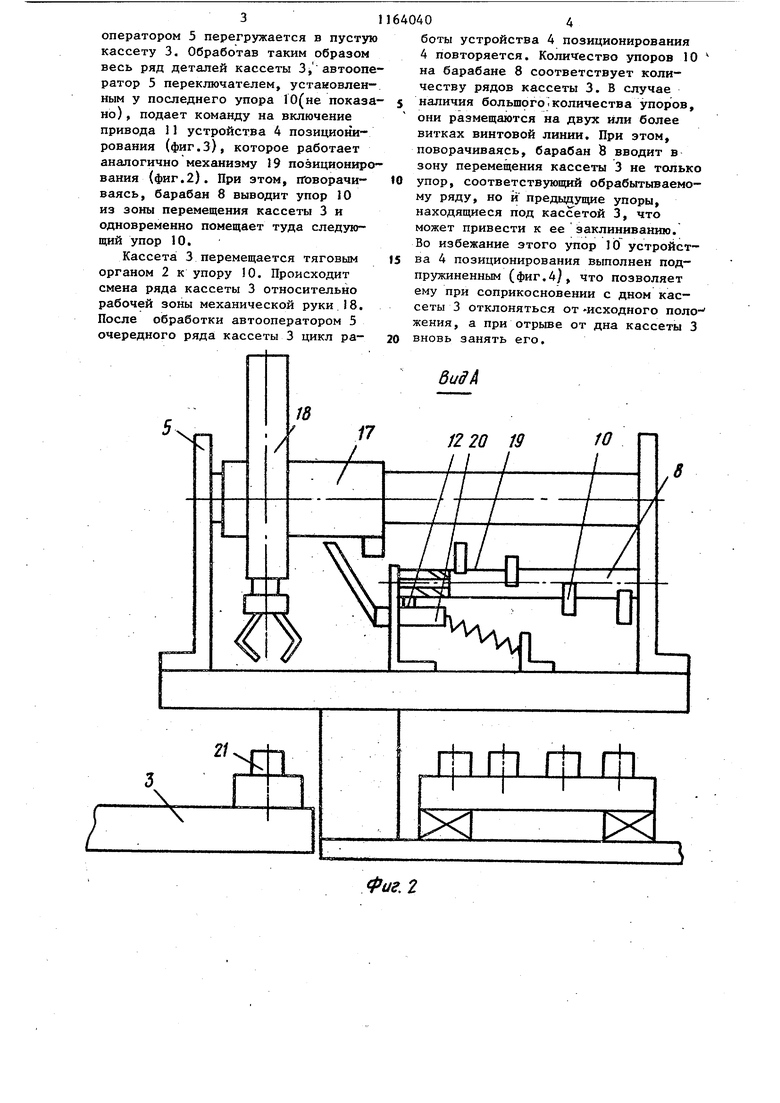
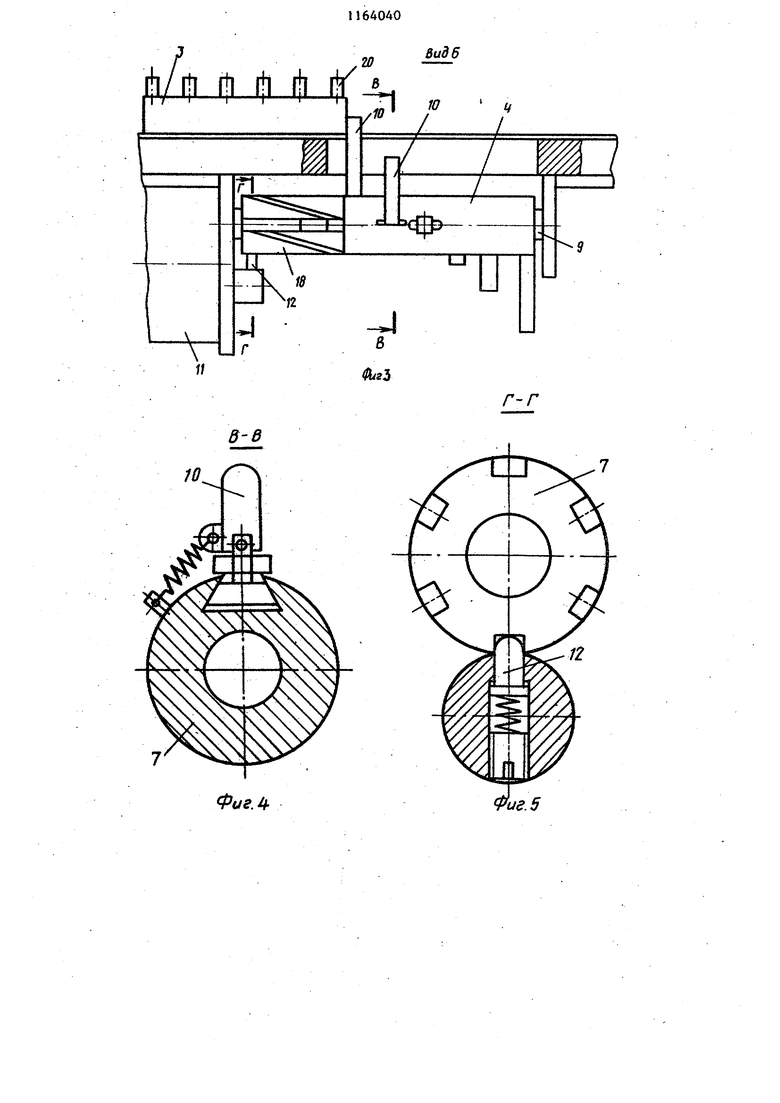
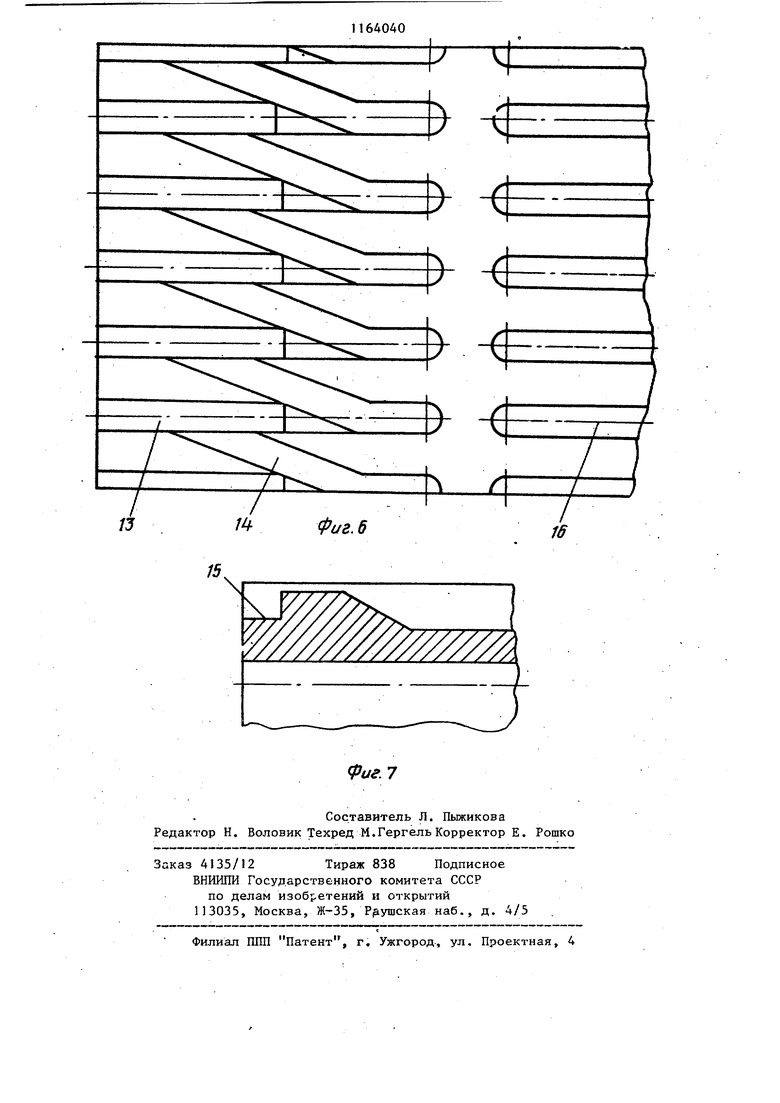
Изобретение относится к машинестроению и может быть использовано в сборочном и механообрабатывающем производствах при подаче деталей на , рабочую позициьо в кассетах непрерывно движущимся транспортером. Цель изобретения - упрощение конструкции транспортной системы гибкой .автоматической линии путем выполнения устройства позициониро™ вания в виде поворотного барабана, на одном конце которого выполнены прямолинейные пазы переменной глубины, соединенные меледу собой винтовыми пазами, а на другом установлены упоры по винтовой линии с возможностью поочередного взаимодейств с торцом кассеты транспортера, и подпружиненного пальца. На фиг. 1 изображена транспортная система гибкой автоматической линии, общий вид; на фиг.2 вид А на фиг. 1; на фиг.З - вид Б на; фиг.1; на фиг.4 - разрез В-В на фиг.З; на фиг.З - разрез 1-Г на фиг.З; на фиг.6 - развертка поворот ного барабана; на фиг.7 - профиль прямолинейного паза с переменной гл биной. Транспортная.система гибкой авто матической линии (фиг.О содержит непрерьюно действующий транспортер 1 с тяговым органом 2, многоместные кассеты 3, устройство 4 позициониро вания (фиг.З), автооператоры 5 (фиг.1), технологические механизмы 6, межоперационный транспорт 7. Устройство 4 позиционирования (фиг.З) состоит из поворотного бара бана 8, укрепленного на оси 9, на котором установлены уцоры 10, приво да П, подпружиненного пальца 12, соединяющего привод 1I с барабаном 8. Поворотный барабан 8 (фиг.6) выполнен в виде цилиндра, на одном к це которого имеются прямолинейные пазы 13 с переменной глубиной (фиг последовательно соединенные между собой винтовыми пазами 14. Каждый прямолинейный 13 и винтовой 14 паз расположены на разной глубине отно сительно наружной поверхности бара на и разделяются между собой ступе кой 15 высотой 2-оЗ мм (фиг.7). Продольные пазы 16 (фиг.б), расп ложенные на другом конце поворотног барабана 8, в которых закреплены уп 02 ры 10, позволяют изменять без переделок шаг устройства 4 позиционирования кассет 3 в случае изменения типоразмеров обрабатываемых деталей. ,Автооператор 5 (фиг.2) содержит привод 17 с установленной на нем механической рукой 18 и механизм 19 позиционирования, конструкция которрго аналогична конструкции устройства 4 позиционирования кассет 3. Отличие состоит в том, что подпружиненный палец 12 установлен на подпружиненной тяге 20,взаимодействующей с приводом 17.. Транспортная система работает следующим образом. Многоместная кассета 3 перемещается тяговым органом 2 до соприкосновения с первым упором 10 (со стороны прямолинейных пазов) устройства 4 позиционирования. Первый ряд гнезд с деталями 2 кассеты 3 располагается в рабочей зоне механической руки 18 азтооператора 5. Подпружиненный палец 12 механизма 19 позиционирования в исходном положении находится на ступеньке 15. Привод 17 автооператора 5 упирается в первый упор 10, находя- ищйся на пути его перемещения, и координата которого соответствует координате первого гнезда в первом ряду кассеты 3. Посге захвата механической рукой 18 детали 21 из кассеты 3 привод 17, перемещаясь к межоперационному транспортеру 7, входит в контакт с подпружиненной тягой 20 и через нее сообщает движен ие пальцу 12. Перемещаясь по винтовому пазу 14, палец 12 поворачивает барабан 8 на определенный угол, выводя из зоны перемещения привода 17 первый упор 10 и вводя в зону перемещения второй упор 10, соответствующий координате следующего гнезда кассеты 3. Механическая рука 18 автооператора 5, поставив на межоперационный транспортер 7 деталь 21,приводом 16 возвращается к кассете 3; При этом привод 17 разъединяется с тягой 20, которая возвращается в исходное положение под воздействием пружины. Подпружиненный палец 12, перемещаясь по прямолинейному пазу 13, попадает на ступеньку 15. В дальнейшем цикл работы автооператора 5 повторяется. Деталь 21, пройдя необходимую обработку технологическими механизмами 6, поступает на позицию выгрузки, где вторым авто3оператором 5 перегружается в пусту кассету 3. Обработав таким образом весь ряд деталей кассеты 3, автооп ратор 5 переключателем, установлен ным у последнего упора 10(не показ но) , подает команду на включение привода 11 устройства 4 позиционирования (фиг.З), которое работает аналогично механизму 19 позиционир вания (фиг.2). При этом, поворачиваясь, барабан 8 выводит упор 10 из зоны перемещения кассеты 3 и одновременно помещает туда следующий упор 10, Кассета 3 перемещается тяговым органом 2 к упору 10. Происходит смена ряда кассеты 3 относительно рабочей зоны механической руки 18. После обработки автооператором 5 очередного ряда кассеты 3 цикл ра-
Фиг, 2 404 боты устройства 4 позиционирования 4 повторяется. Количество упоров 10 на барабане 8 соответствует количеству рядов кассеты 3. В случае наличия большого i количества упоров, они размещаются на двух или более витках винтовой линии. При зтом, поворачиваясь, барабан В вводит в зону перемещения кассеты 3 не только упор, соответствующий обрабытываемому ряду, но и предыдущие упоры, находящиеся под кассетой 3, что может привести к ее заклиниванию. Во избежание зтого упор 10 устройства 4 позиционирования выполнен подпружиненным (фиг.4), что позволяет ему при соприкосновении с дном кассеты 3 отклоняться от-исходного положения, а при отрыве от дна кассеты 3 вновь занять его.
/
П у
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1986 |
|
SU1315292A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Манипулятор | 1984 |
|
SU1212779A1 |
| Гибкая автоматическая линия | 1989 |
|
SU1662808A1 |
| Многопозиционный автооператор | 1988 |
|
SU1683969A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
| Многошпиндельный обрабатывающий станок для одновременной обработки сверлением и (или) фрезерованием нескольких одинаковых деталей с устройствами смены инструментов и для приема заготовок на палеты | 1985 |
|
SU1471937A3 |
| Манипулятор | 1983 |
|
SU1151450A1 |
| Автооператор | 1983 |
|
SU1144842A2 |
1. ТРАНСПОРТНАЯ СИСТЕМА ГИБКОЙ АВТОМАТИЧЕСКОЙ ЛИНИИ, содержащая транспортер с размещенными на нем кассетами с изделиями и устройством позиционирования, технологические механизмы и автооператоры, установленные вдоль транспортера, отличающаяся тем, что, с целью упрощения ее конструкции, устройство позиционирования выполнено в виде поворотного барабана, на одном конце которого выполнены прямолинейные пазы переменной глубины, соединенные между собой винтовыми пазами, а на другом установлены упоры по винтовой линии с возможностью поочередного взаимодействия с торцом кассеты транспортера, и подпружиненного пальца, установленного на приводе устройства позиционирования с возможностью возвратнопоступательного перемещения по вышеупомянутым пазам. с 2. Система по п.1, о т л и ч а ющ а я о я тем, что упоры выполнены подпружиненными и установлены в барабане устройства позиционирования W С с возможностью регулирования их положения по шагу. о фффф ш. фффф //////////л т ////////7/,
дг
й
-I
ff
-J
гЗ
ФигЛ
| Транспортная система гибкой автоматической линии | 1976 |
|
SU722731A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
