t13
Изобретение относится к машиностроению, в частности к автоматиза- ции погрузочно-разгрузочных операций при обслуживании технологических процессов с транспортированием деталей из многоместных кассет.
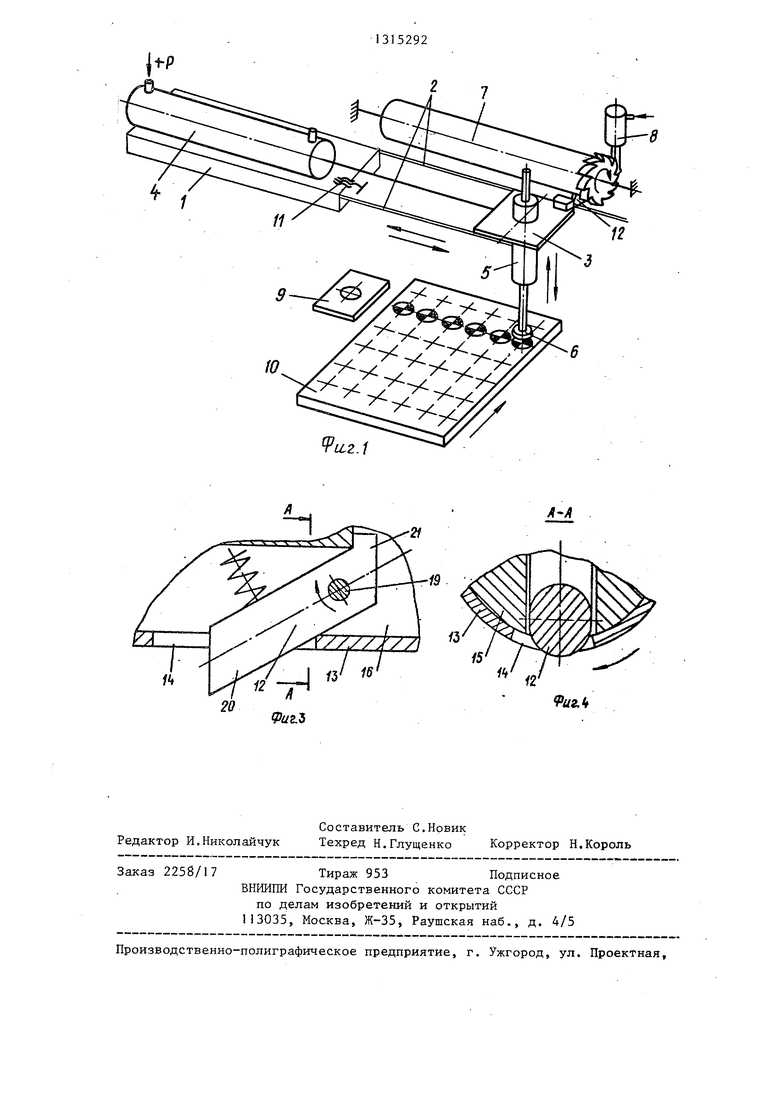
На фиг,1 изображен манипулятор, общий вид; на фиг.2 - механизм позиционирования; . на фиг.З - упор меха-, низма позиционирования; на фиг.4 - разрез А-А на фиг.З.
Манипулятор содержит корпус 1, закрепленные на нем направляющие 2 для каретки 3 (механической руки), привод 4 горизонтального перемещения каретки 3, привод 5 вертикального перемещения захвата 6 (рабочего органа) и механизм 7 позиционирования приводом 8. Манипулятор обслуживает зону 9 сборки и зону кассеты 10. В зоне 9 сборки точность позиционирования каретки 3 обеспечивается регулируемым упором 11. В зоне кассеты 10 положение каретки (механической руки) обеспечивается упорами 12 механизма 7. Количество упоров 12 в механизме позиционирования, в частном случае, равно количеству гнезд в поперечном ряду кассеты 10.
Механизм 7 позиционирования содержит полый поворотный цилиндр 3 (барабан) с окнами 14, расположень ыми, например, по винтовой линии на его боковой поверхности, неподвижную внутри полого цилиндра 13 штангу 15 с подпружцненными относительно нее упорами 12, установленными в пазах 16 штанги, которые расположены в данном случае в одной плоскости. Поворот цилиндра 13 осуществляется от храпового колеса 17, привода 8, с фиксацией стопором 18. Количество окон 14 на боковой поверхности полого цилиндра 13 в данном случае .соответствует количеству упоров 12. Подпружиненный упор I2 представляет собой покачивающийся на оси 19 двуплечий рычаг. Одно плечо 20 взаимодействует с окном 14 поворотного цилиндра 13 и кареткой 3, Другое плечо 21 контактирует с неподвижной штангой 15 по плоскостям 22, что определяет жесткость механизма 7 и точность системы позиционирования.
Манипулятор работает следующим образом.
22
По программе каретка 3 (механическая рука) от привода 4 перемещается в зону кассеты 10 для взятия детали. При этом положение каретки 3 опреде- ляется упором 12, который соответствует гнезду кассеты 10 при последовательной обработке. Взяв деталь из гнезда кассеты 10, захват 6 поднимается с помощью привода 5, и каретка
по команде перемещается в зону 9 сборки до постоянного упора 11.
Выгрузив деталь в зону 9 сборки, каретка 3 перемещается.вновь в зону кассеты 10, но позиционирование осуществляется на другом упоре 12.
Смена упора 12 осуществляется следующим образом.
По команде привод 8 поворачивает храповое колесо 17 с полым цилиндром 13 (барабаном) на угол, соответствующий шагу размещения окьн 14, и стопорится фиксатором 18. При этом предыдущий упор 12 убирается внутрь полого цилиндра 13 в момент поворота,
а очередной упор 12 выходит из окна 14. Расположение окон 14, например, по винтовой линии дает возможность в каждый цикл перемещения каретки 3 лишь одному упору 12 выйти из окна
14 для контактирования с ней при позиционировании. Тем самым все упоры 12, расположеннь1е в одной плоскости штанги 15, убраны внутрь полого цилиндра 13, кроме одного упоря, соответствующего гнезду кассеты 10. В дальнейшем работа манипулятора повторяется.
Формула изобретения
Манипулятор, содержащий механическую руку с рабочим органом, приводы ее горизонтального перемещения, а также механизм позиционирования руки, содержаний поворотный барабан и упоры, отличающийся тем, что, с целью упрощения конструкции и снижения габаритов за счет повьште- ния компактности механизма позиционирования, барабан последнего вьтол- нен полым, со сквозньп ш окнаг-ш на его цилиндрической поверхности, а упоры расположены на дополнительно установленной .вйутри барабана штанге
напротив окон барабана и подпружинены относительно этой штанги.
Vu,2.1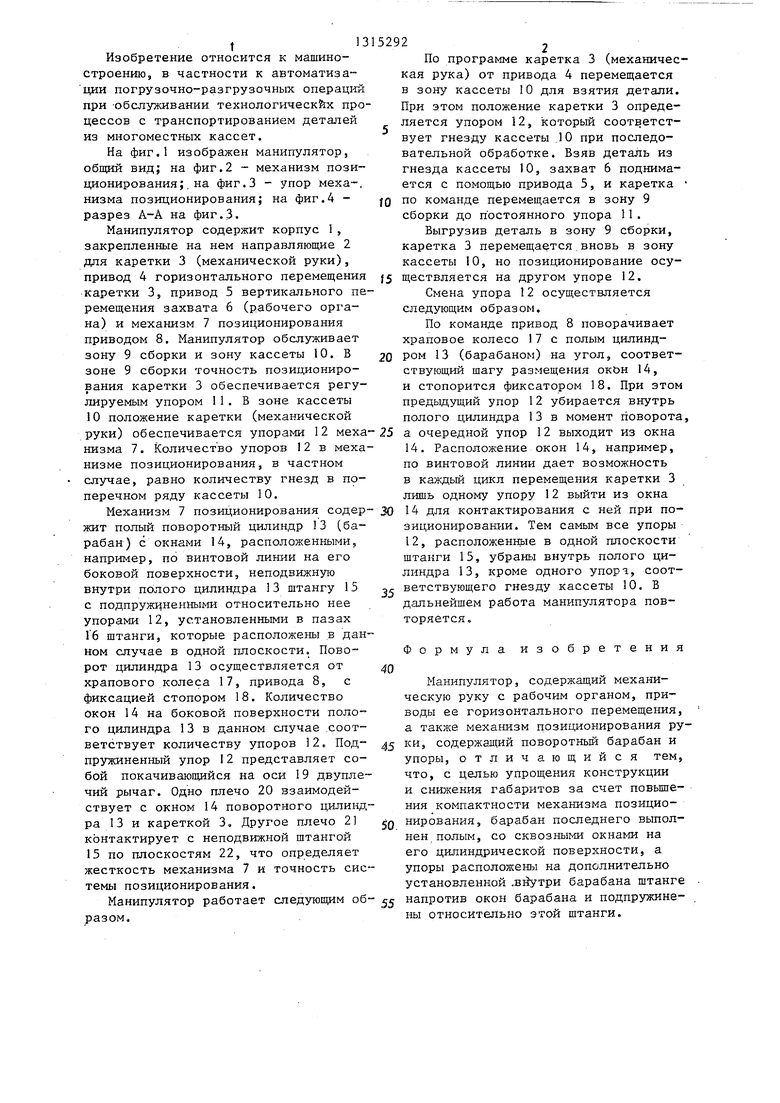
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1009754A1 |
| Транспортная система гибкой автоматической линии | 1984 |
|
SU1164040A1 |
| Полуавтомат для сборки изделий типа галетных переключателей | 1981 |
|
SU1069971A1 |
| Манипулятор | 1987 |
|
SU1657369A1 |
| ОБЛИЦОВОЧНЫЙ МАНИПУЛЯТОР | 1990 |
|
RU2023582C1 |
| Минипулятор | 1990 |
|
SU1743849A1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Манипулятор | 1984 |
|
SU1212779A1 |
| Устройство для открывания переплетов | 1981 |
|
SU1006671A1 |
| Устройство для бурения | 1982 |
|
SU1049651A1 |
Изобретение относится к области машиностроения. Цель изобретения - упрощение конструкции и снижение габаритов за счет повьшения компактности механизма позиционирования. Позиционирование механической руки манипулятора (каретки) осуществляется непосредственно на упоры 12. Каретка обслуживает зону сборки и зону кассеты. Смена упоров 12 осуществляется в соответствии с обслуживаемым рядом кассеты. По команде привода поворачивается храповое колесо 17 с полым цилиндром 13 (барабаном) на угол, соответствующий шагу ра.змеще- ния окон 14. Окна 14 расположены по винтовой линии вдоль оси полого цилиндра 13. После поворота цилиндр 1 3 стопорится фиксатором 18. При этом предыдущий упор 12 убирается внутрь полого цилиндра I3 в момент его поворота, а очередной упор 12 выходит из окна 14. Расположение окон 14 по . винтовой линии-дает возможность лишь одному упору 12 выйти из окна. 14 для контактирования с кареткой при ее позиционировании. 4 ил. I сл 00 сд 1ч5 СО 
lit
20
A-A
fuz,
Редактор И.Николайчук
Составитель С.Новик
Техред Н.Глущенко Корректор Н,Король
Заказ 2258/17Тираж 953Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная,
| Манипулятор | 1979 |
|
SU770781A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| , | |||
