20
t2t2779
Изобретение относится к машинотроению, а именно к манипуляторам ля автоматизации эагрузочно-раз- рузочных операций при обслуживании ехнологических процессов с транс- 5 ортировкой деталей в многоместных ассетах.
Целью изобретения яв,ляется повыение точности позиционирования.
На фиг. 1 изображен предлагаемый ю анипулятор, общий вид на фиг 2 - пример использования манипулятора} на фиг 3 - механизм регулировки хода и направляющий стержень с,под- вижным упором; на фиг. 4 - разрез 15 -А на-фиг. 3; на фиг. 5 - крайнее евое положение подвижного упора; на фиг. 6 - крайнее правое положеие подвижного упора на фиг. 7 - азрез Б-Б на фиг. 5.
Манипулятор содержит корпус 1, на котором установлена механическая рука 2 с приводами горизонтального 3 и вертикального 4 перемещений и естко установленные стойки 5 и 6.
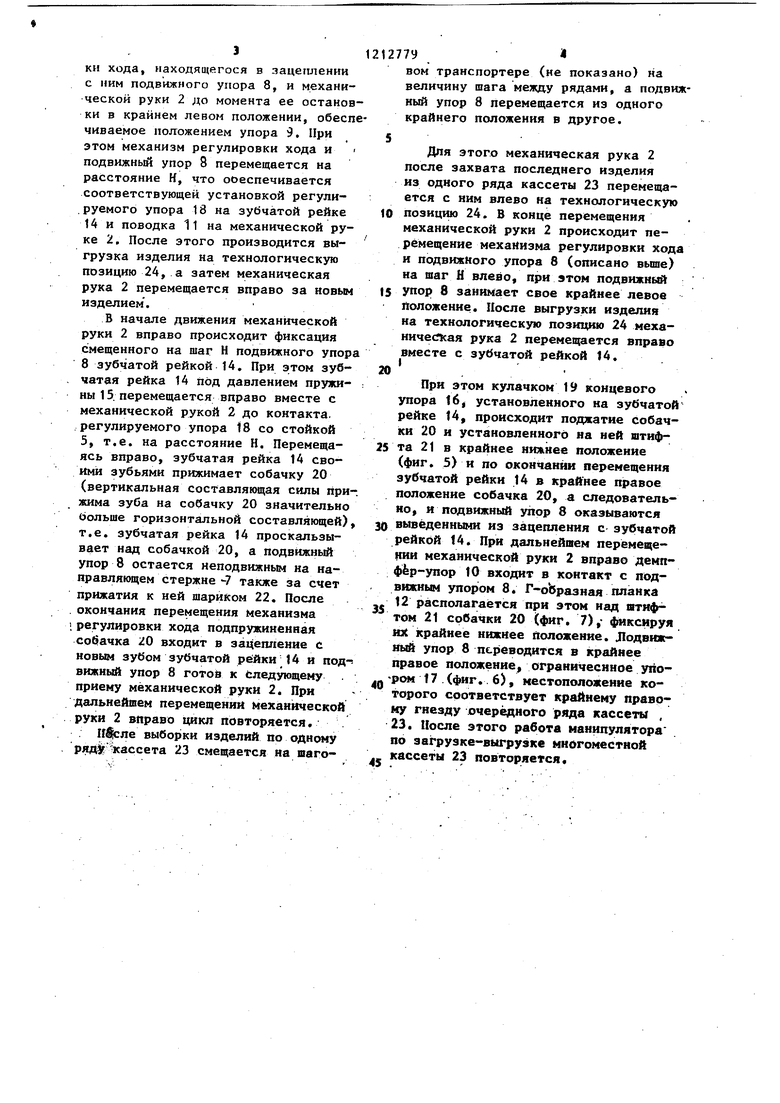
На стойках 5 и 6 жестко закреплен направляющий стержень 7с подвижным упором 8. При этом на с тойке 5 закреплен упор 9, местоположение которого соответствует крайнему левому положению механической руки 2, На выходном элементе привода 3 горизонтального перемещения аакрепле- Ны демпфер-упор 10, поводок 11, Г-образная планка 12, На выходном элементе привода 4 вертикального перемещения установлен захват 13. А механизм регулировки хода выпол- иен в виде зубчатой рейки 14с шагом h, установленной на стдйках 5 и б.параллельно направляющему стержню 7 с возможностью возвратно- поступательного перемещения и подпружиненной относительнр корпуса 1 посредством пружины 15 возврата. :
25
30
40
45
На зубчатой рейке 14 закреплены . концевые упоры 16 и 17 и регулируе- . мый упор 18, На концевом упоре 17 выполнен кулачок 19. Концевые упоры . 16 и 17 устанавливаются в зависимое- ти от размера обслутииваемой кассеты, а регулируемый упор 18 - от шага обслуживаемой кассеты, т,е. на расстоянии К от стойки 5 при крайнем левом положении мекани1геской руки 2.
На подвижном упоре S установлена подпружиненная собачка 20 со оти том 21. Подвижный упор 8 подяат к
нап ным
хва ты чат тех лож нем рук ЛИЙ ход
обр
ман мех 13 тал ным фер обр впр мом в к уст упо ти}к го нии кая лен етс слу пла под
ния ние рей гул ных лен Зат с n ств и в вод ват зах мех
рук под ме:( мещ дос го дви
0
5
0
0
5
.
направляющему стержню 7 подпружиненным шариком 22..
Манипулятор предназначен для захвата изделия из многоместной кассеты 23 с шагом Н, кратным шагу зубчатой рейки 14, и переноса его на технологическую позицию 24, местоположение которой соответствует крайнему левому положению механической руки 2, или наоборот. Выборка ЛИЙ из одного ряда кассеты 23 происходит справа налево.
Манипулятор работает следующим образом.
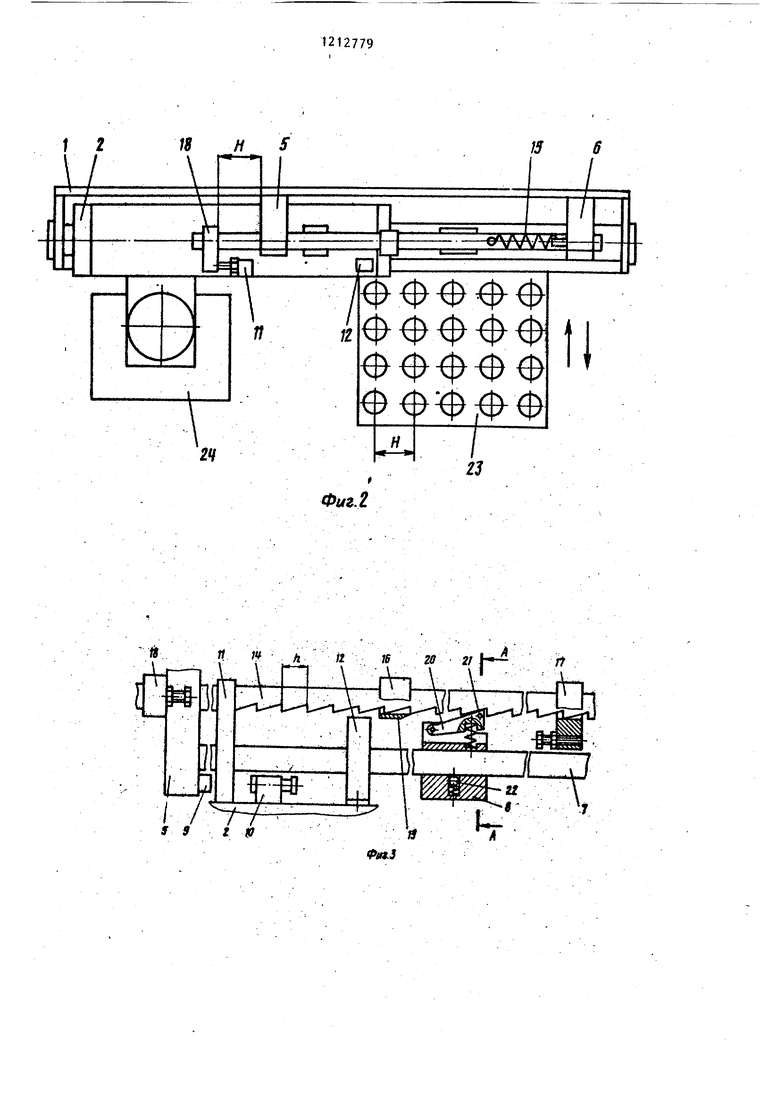
В соответствии с программой командного устройства (не показан) механическая рука 2 с захватом 13 под действием привода 3 горизонтального перемещения, с установленными на его выходном элементе демпфером-упором 10, поводком 11 и Г- образной планкой 12, перемещается вправо в сторону кассеты 23. В этот момент зубчатая рейка 14 находится в крайнем правом положении, т.е. установленный на ней регулируемь1й упор 18 поджат к стойке 5, При дос- ти}кении демпфера-упора 10 подвижного упора 8, находящегося зацеплении с зубчатой рейкой 14, механическая рука 2 останавливается и установ ленный на ней захват 13 располагается над соответствующим гнездом обслуживаемой кассеты 23, а Г-образная планка 12 - под штифтом 21 (фиг, 4) подпружиненной собачки 20;
При этом точность позиционировав ния обеспечивается жестким замыканием подвижного упора 8, зубчатой рейки li и закрепленного на ней регулируемого упора 18, т,е, подвижных элементов, на неподвижно закрепленную на корпусе 1 стойку 5 (фиг.З). Затем По соответствующим командам с nporpaMKiHoro устройства под действием приводов горизонтального 3 и вертикального 4 перемещения производится опускание захвата 13, захват изделия из кассеты 23, подъем захвата 13 с изделием и перемещение механической руки 2 влево до упора 9.
В конце перемещения механической руки 2 влево происходит подготовка подвижного упора 8 к новому приему ме:(анической руки 2у а именно перемещению его на шаг Н влево. При достижении поводком 11 регулируемого упора 18 происходит совместное движение влево механизма регулировки хода, находящегося в зацетшении с ним подвижного упора 8, и механической руки 2 до момента ее остановки в крайнем левом положении, обеспечиваемое положением упора 9. При этом механизм регулировки хода и подвижный упор 8 перемещается на расстояние Н, что ооеспечивается соответствующей установкой регули- .руемого упора 18 на зубчатой рейке 14 и поводка 11 на механической руке 2, После этого производится выгрузка изделия на технологическую позицию 24, а затем механическая рука 2 перемещается вправо за новым изделием .
В начале движения механической руки 2 вправо происходит фиксация смещенного на шаг Н подвижного упора 8 зубчатой рейкой 14, При этом зубчатая рейка 14 под давлением пружи- ны 15. перемещается вправо вместе с механической рукой 2 до контакта, регулируемого упора 18 со стойкой 5, т.е. на расстояние Н. Перемещаясь вправо, зубчатая рейка 14 своими зубьями прижимает собачку 20 (вертикальная составляющая силы прижима зуба на собачку 20 значительно больше горизонтальной составляющей) т.е. зубчатая рейка 14 проскальзывает над собачкой 20, а подвижный упор 8 остается неподвижным на направляющем стержне -7 также за счет прижатия к ней шариком 22. После . окончания перемещения механизма регулировки хода подпружиненная собачка 20 входит в зацепление с новым зубом зубчатой рейки 14 и подвижный упор 8 готов к следующему приему механической руки 2. При дальнейшем перемещении механической руки 2 вправо цикл повторяется. . . Пф:ле выборки изделий по одному ряд -кассета 23 смещается на шаго121277У
вом транспортере (не показано) на величину шага между рядами, а подвижный упор 8 перемещается из одного крайнего положения в другое.
Дпя этого механическая рука 2 после захвата последнего изделия из одного ряда кассеты 23 перемещается с ним влево на технологическую
позицию 24. В конце перемещения механической руки 2 происходит перемещение механизма регулировки хода и подвижного упора 8 (описано выше) на шаг Ы влево, при этом подвижный
упор 8 занимает свое крайнее левое йоложение. После выгрузки изделия на технологическую позицию 24 меха- ничес хая рука 2 перемещается вправо
вместе с зубчатой рейкой 14.
При этом кулачком 19 концевого упора t6, установленного на зубчатой рейке 14, происходит поджатие собачки 20 и установленного на ней штифта 21 в крайнее нижнее положение (фиг. 5) и по окончании перемещения зубчатой рейки 14 в крайнее правое положение собачка 20, а следовательно и подвижньМ упор 8 оказываются
выведенными из зацепления с зубчатой рейкой 14. При дальнейшем перемещении механической руки 2 вправо демп- фбр-упор 10 входит в контакт с подвижным упором 8. Г-оЬразная планка 12 располагается при этом над штифтом 21 собачки 20 (фиг, 7),- фиксируя их крайнее нижнее положение. Лодвиж- ный упор 8 переводится в крайнее правое положение, ограничеснное упором 17.(фиг..6), местоположение которого соответствует крайнему правому гнезду очерёдного рада кассеты , 23. После этого работа манипулятора по загрузке-выгрузке многоместной
кассеты 23 повторяется
I 218 Н 5
« i
i
/5 6
Mn
n12
ti
Фе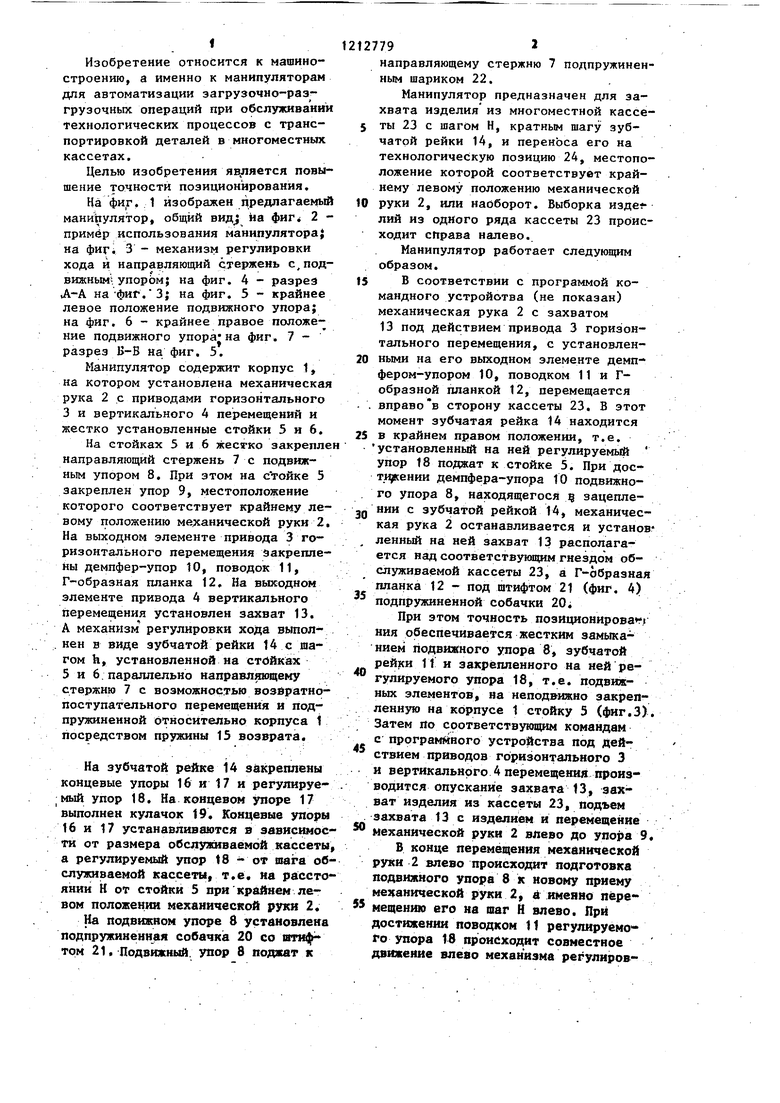
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1982 |
|
SU1009754A1 |
| Устройство для укладки в тару стержнеобразных предметов | 1982 |
|
SU1076360A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Манипулятор | 1984 |
|
SU1202861A1 |
| Манипулятор | 1984 |
|
SU1242344A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Устройство для перемещения захвата манипулятора | 1982 |
|
SU1079599A1 |
| Манипулятор | 1985 |
|
SU1331638A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |

24
Фиг.2
0
t ff
Л-4
М
Л Г г
л
к а и
«kULd
JtJLВНИИПИ: Заказ 705/23 Тирах , Подйяемо
Филиал ШШ Патент, г.ТкгороА уп 1 «ктяа« 4
| Манипулятор | 1979 |
|
SU770781A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
