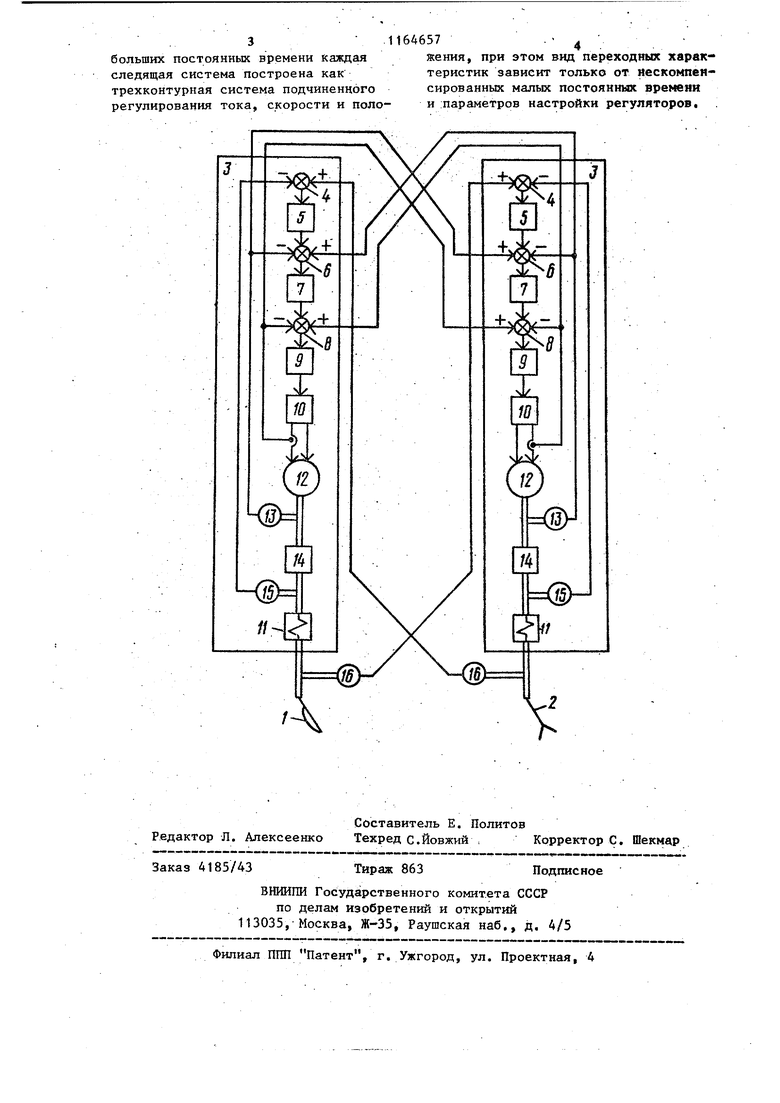
Изобретение относится к робототехнике, и может быть использовано при .создании дистанционных копирующих манипуляторов. Целью изобретения является повьгаение быстродействия и точности устройства. На чертеже представлена функциональная схема предлагаемого устройства. Устройство содержит задающий и исполнительный механизмы 1 и 2 соот ветственно, следящие системы 3, пер вые сумматоры 4, регуляторы 5 поло жения, вторые сумматоры 6, регулйто ры 7 скорости, третьи сумматоры 8, регуляторы 9 тока, датчики 10 тока, упругие элементы 11, двигателя 12, датчики 13 скорости, редукторы 14, первые и вторые датчики 15 и 16 пол жения соответственно; Устройство работает следующим об зом. . . . - При повороте вала защитного меха низма 1. сигнал рассогласования его датчика 16 положения и датчика 15 исполнительной стороны сумматора 4 исполнительной стороны через регуля ры 5, 7 и 9 поступает на двигатель Двигатель 12 через редуктор 14 пере мещают датчик 15 исполнительной сто роны. Через упругий элемент 11 движ ние от вала задающего механизма 1 передается к валу исполнительного механизма 2. Вследствие .структурной симметрии системы процесс передачи угла поворота от вала исполнительно механизма 2 к валу задающего механи 1 происходит аналогичным образом,. При отражении усилий в исходном положении все датчики 13, 15 и 16 занимают согласованное положение. При приложении момента к валу испол нительного механизма 2 он поворачив ется .относительно .выходного вала редуктора 14 на угол,.определяемьй жесткостью упругого элемента 11 и величиной приложенного момента, . вследствие чего упругий элемент 11 находится в напряженном состоянии. Сигнал рассогласования датчика .16 положения и датчика 15 задающей стороны с выхода сумматора 4 задающ стороны через регуляторы 5, 7 и 9 поступает на выход двигателя 12„ Двигатель 12 через редуктор 14 пере дает движение до тех пор, пока не достигается новое согласование поло 572 жения датчика 16 положения исполнительной стороны и датчика 15 задающей стороны и датчика. Поворот выходного вала редуктора 14 приводит в напряженное состояние упругий элемент 11, происходит передача усилия с вала исполнительного механизма 2 на вал задающего механизма 1. При увеличении нагрузочного момента на валу исполнительного механизма 2 выходной вал редуктора 14 задающей стороны поворачивается еще на некоторый угол,- что приводит к еще больщему напряженному состоянию упругих элементов 11. Такое устройство работает до тех пор, пока момент закрутки упругого элемента 11 задающей стороны не сравняется с моментом, приложенным к валу исполнительного механизма 2. После этого устройство приходит в движение, при этом упругие элементы 11 находятся в напряженном состоянии. Произошло отражение усилия от исполнительного механизма 2 к задающему в масшт.абе, зависящим от соотношения жесткостей упругих элементов 11. Вследствие структурной-симметрии устройства процесс отражения усилия от вала задающего механизма 1 к исполнительному происходит аналогичным образом. При наличии нагрузочных моментов на валах задающего и исполнительных элементов. 1 и 2 устройство в установивщемся режиме движется равноускоренно или равнозамедленно с. ускорением, величина которого пропорциональна величине разности нагрузочных моментов. Данная пропорциональность обеспечивается за счет компенсации вн-утреннего вязкого (скоростного) трения, обусловленного наличяем в каждой следящей системе Скоростного контура, путем введения перекрестных положительных обратных связей по скорости, компенсирующих, сигналы и действие собственных обратных связей по скорости соответственно и позволяет тем самым двигателям 12 развивать моменты, величина которых пропорциональна величине сигналов с выхода сравнения. В переходных режимах работы степень пропорциональности между ускорениями механизмов 1 и 2 устройства и разностью нагрузочных моментов определяется наличием в устройстве инерционных элементов и величиной их постоянной времени. Для компенсации больших постоянных времени каждая следящая система построена как трехконтурная система подчиненного регулирования тока, скорости и положения, при этом вид переходных характеристик зависит только от иескомпемсированных малых постоянных BpehfCHH и параметров настройки регуляторов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Двухканальная следящая система | 1973 |
|
SU446027A1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| Следящий электропривод наведения механической системы | 1988 |
|
SU1562333A2 |
| ЦИФРОВОЙ ЭЛЕКТРОПРИВОД | 2009 |
|
RU2404449C1 |
| Следящий электропривод | 1988 |
|
SU1644084A1 |
| Следящий электропривод | 1987 |
|
SU1442973A1 |
| Стенд для испытания электрических исполнительных механизмов | 1987 |
|
SU1499141A1 |
| Следящая система | 1983 |
|
SU1123019A1 |
| Следящий электропривод с синхронным исполнительным двигателем | 2018 |
|
RU2695804C1 |
| Трехканальная следящая система | 1989 |
|
SU1716479A1 |
УСТРОЙСТВО дал УПРАВЛЕНИЯ КОПИРУМЦИМ МАНИПУЛЯТОРОМ, содержащее на задающей и исполнительной сторонах последовательно соединеншле цервый сумматор, регулятор положения второй сумматор,, регулятор скорости, третий сумма:тор, регулятор тока,, датчик тока и двигатель, механически связанный непосредственно с датчиком скорости и через редуктор с первым датчиком положения, который механически связан через упругий элемент с вторым датчиком положения, -причем выход датчика тока подключен .к второму входу третьего сумматора, выход датчика скорости соединен с вторым входом второго сумма:тора, а выход первого датчика положения подключен к первому, входу первого .сумматора, о т л и ч а ю щ е-е с я тем, что, с целью повышения быстродействия и точности устройства, в .нем выходы второго датчика положения , датчика скорости и датчика тока задающей стороны соединены соответственно с вторым входом первого сумматора, третьим входом второго сумматора и третьим входом третьего сумматора исполнительной (Л стороны, а выходы второго датчика с положения-, датчика с-корости и датчика тока исполнительной, стороны подключены соответственно к второму входу первого сумматора, третьему входу второго сумматора и третьему входу третье.го сумматора задающей Од 4 Од О1 стороны. . . . / ; 
| Авторское свидетельство СССР № 308627, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Устройство для управления позиционным электроприводом | 1973 |
|
SU528542A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
