Изобретение относится к области приборостроения и используется в измерительной технике для испытаний различных электромеханических преобразователей.
Целью изобретения является повышение точности измерений, что обеспечивает качественное изготовление электромеханических преобразователей.
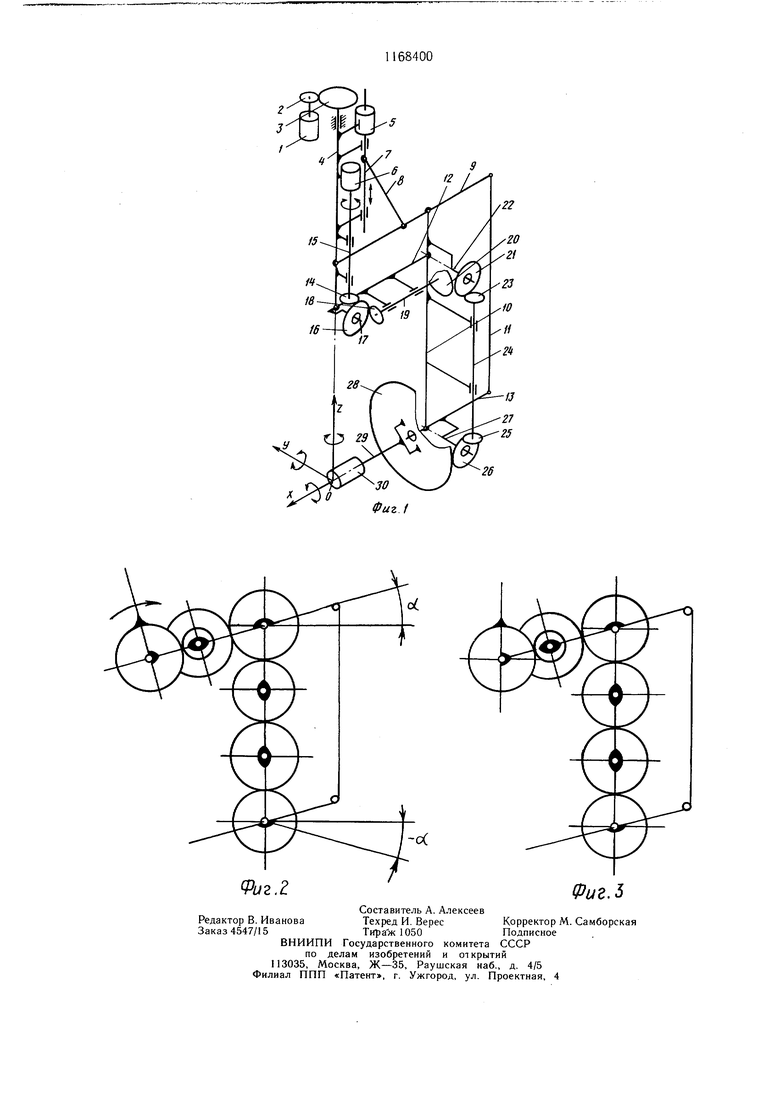
На фиг. 1 показана кинематическая схема манипулятора; на фиг. 2 и 3 - примеры кинематической связи между звеньями манипулятора с помощью цилиндрических зубчатых колес.
Манипулятор содержит привод 1 вращения преобразователя вокруг вертикальной оси Z, который через редуктор, состоящий из зубчатых колес 2 и 3, вращает вертикальную щтангу 4, на которой закреплены приводы 5 и 6 вращения преобразователя вокруг горизонтальной оси У и вокруг продольной оси X. Вращение преобразователя вокруг оси У осуществляется при продольном перемещении приводом 5 ползуна 7, который через щатун 8 приводит во вращение рычаг 9 сдвоенного параллелограмма, состоящего из трех вертикальных рычагов, один из которых является частью вертикальной щтанги 4 манипулятора, двух вертикальных рычагов 10 и 11 и трех горизонтальных рычагов 9, 12 и 13, шарнирно соединенных с вертикальными рычагами. Вращение преобразователя вокруг его продольной оси X осуществляется приводом 6, который вращает коническую щестерню 14, неподвижно закрепленную на валу 15 и вращающую коническое зубчатое колесо 16, свободно вращающееся на валу 17, ось которого расположена перпендикулярно щтанге 4 и рычагу 12 сдвоенного параллелограмма и проходит через точку пересечения их осей. Далее движение передается через щестерню 18, неподвижно закрепленную на валу 19, который вращается в подщипниках, закрепленных на рычаге 12.
Неподвижно закрепленное на валу 19 коническое зубчатое колесо 20 вращает зубчатое колесо 21, свободно вращающееся на валу 22, ось которого расположена перпендикулярно рычагам 10 и 12 и проходит
через точку пересечения их осей. Зубчатое колесо 21 вращает зубчатое колесо 23, неподвижно закрепленное на валу 24, на противоположном конце которого неподвижно закреплено коническое зубчатое колесо 25. Вал 24 вращается в подщипниках, соединенных с вертикальным рычагом 10. Зубчатое колесо 25 вращает коническое колесо 26, свободно вращающееся на валу 27, ось которого расположена перпендикулярно
рычагам 10 и 13 и проходит через точку пересечения их осей. Колесо 26 вращает коническое зубчатое колесо 28, свободно сидящее на валу, являющемся продолжением горизонтального рычага 13. На регулируемом по длине валу 29, неподвижно закрепленном на колесе 28 и соосно с ним, закрепляется преобразователь 30.
Устройство работает следующим образом.
На валу 29 закрепляется преобразователь таким образом, что его чувствитель- ный элемент (рабочий центр) располагается в точке пересечения осей Х,У и Z. Вращение вокруг вертикальной оси Z осуществляется с помощью привода 1. При этом
вращается щтанга 4 вместе со всеми закрепленными на ней узлами и механизмами. Вращение вокруг горизонтальной оси У осуществляется с помощью привода 5, который поворачивает горизонтальные рычаги 9 и 12 вокруг щарниров, расположенных на вертикальной щтанге 4. При этом преобразователь вращается вокруг точки О, остающейся неподвижной в пространстве. Вращение преобразователя вокруг оси X производится с помощью привода 6 и кинематической связи, включающей зубчатые
колеса 14,16,18,20,21,23,25,26 и 28. Причем передаточное отнощение этой связи подобрано таким образом, что при неподвижном колесе 14 (привод 6 выключен) и работающем приводе 5 (рычаги 9 и 12 совершают
вращательное движение вокруг щарниров на щтанге 4) колесо 26 вращается синхронно с рычагом 13. При этом колесо 28 остается неподвижным относительно оси рычага 13. Таким образом, осуществляется независимый привод по осям У и X.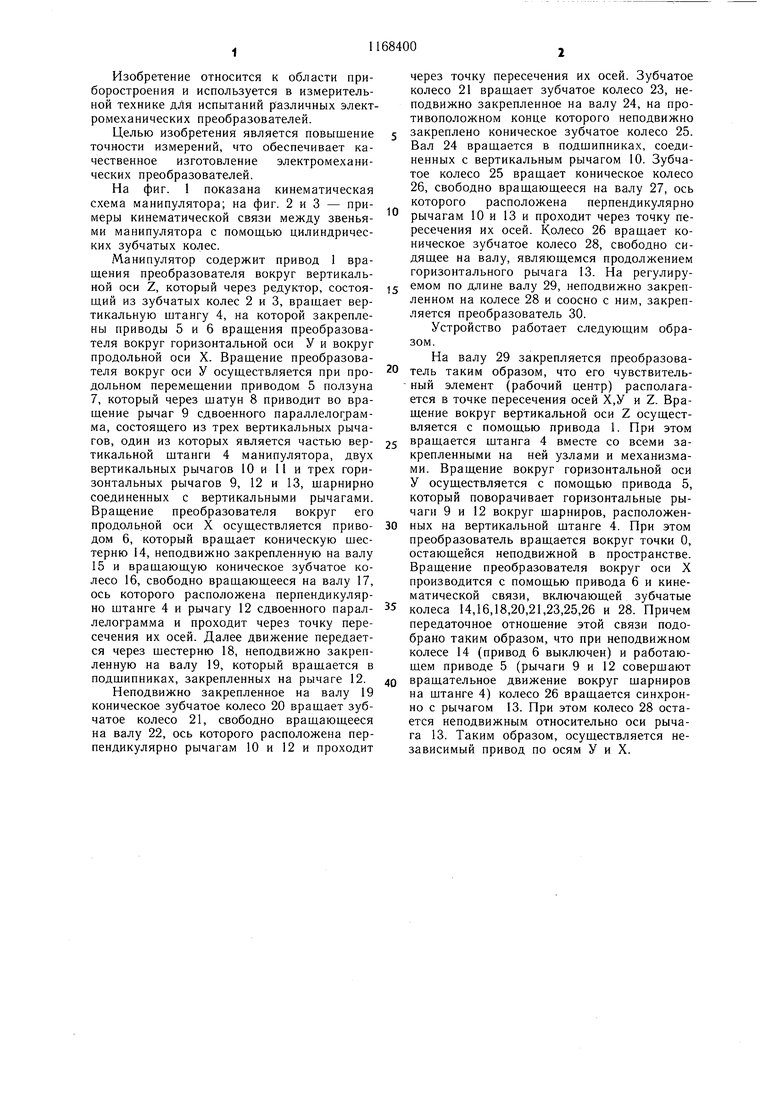
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1980 |
|
SU984859A1 |
| Манипулятор | 1986 |
|
SU1364467A1 |
| Рука манипулятора | 1982 |
|
SU1042989A1 |
| Устройство для затяжки и открытия контактных зажимов алюминиевых электролизеров | 1978 |
|
SU751841A1 |
| ПОДВЕСНОЕ МАНИПУЛИРУЮЩЕЕ УСТРОЙСТВО С РУЧНЫМ УПРАВЛЕНИЕМ | 2014 |
|
RU2561559C1 |
| МОБИЛЬНЫЙ РОБОТ | 1991 |
|
RU2026227C1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| "Устройство для шлифования гнутых деталей из древесины "Адзура" | 1990 |
|
SU1776223A3 |
| МНОГОКРАТНЫЙ ШАРНИР ПЕРЕДАЧИ | 2013 |
|
RU2543135C2 |
| Перегрузочное устройство | 1987 |
|
SU1602833A1 |
МАНИПУЛЯТОР ДЛЯ ИСПЫТАНИЯ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРЕОБРАЗОВАТЕЛЕЙ, содержащий поворотную штангу, два шарнирно связанных между собой параллелограммных механизма, причем шарниры первого из них размешены на поворотной штанге, а также приводы врашения исполнительного органа, отличающийся тем, что, с целью повышения точности измерений, ои снабжен ползуном с приводом, шарнирно соединенным с ним шатуном, а также валом, кинематически связанным при ПОМОШ.И враш.ательных звеньев с приводом, причем ползун размеш,ен в направляюших поворотной штанги, шатун шарнирно соединен с общим звеном параллелограммных механизмов, а вращательные звенья размещены соответственно первое - соосно с шарниром, соединяющим поворотную штангу с первым параллелограммом, второе - соосно с шарниром, размещенным на общем звене параллелограммов, и третье - соосно с щарниром второго параллелограмма, близлежащим к исполнительному органу, при этом вал кинематически связан с третьим вращательным звеном и его ось вращения пересекается с осью поворота щтанги, кроме того, передаточные отнощения вращательных звеньев связаны с учетом знаков уравнением i izi А 1л 1, + где lij -передаточное отношение между СО первым и третьим вращательными звеньями; iai - передаточное отношение между вторым и третьим вращательными звеньями. О5 00 4
| Манипулятор | 1978 |
|
SU697316A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
