1 11
Изобретение относится к технике очистки деталей машин, в частности при гальванических процессах.
Цель изобретения - повышение производительности и снижение энергоемкости.
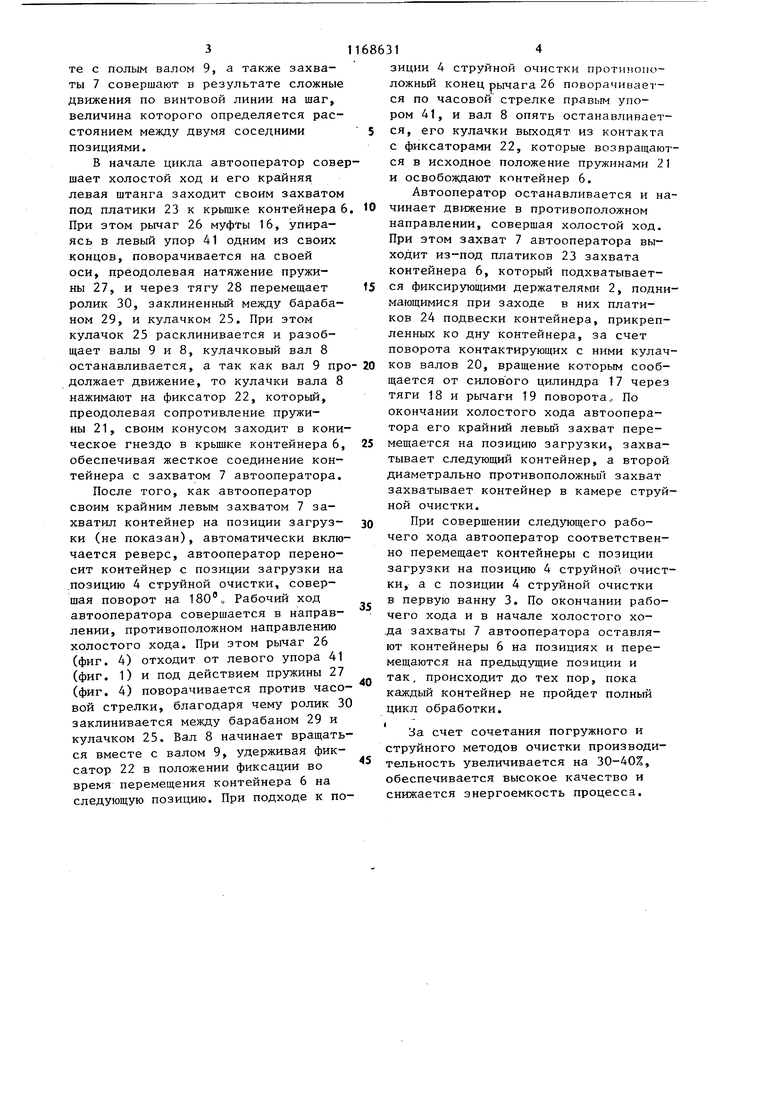
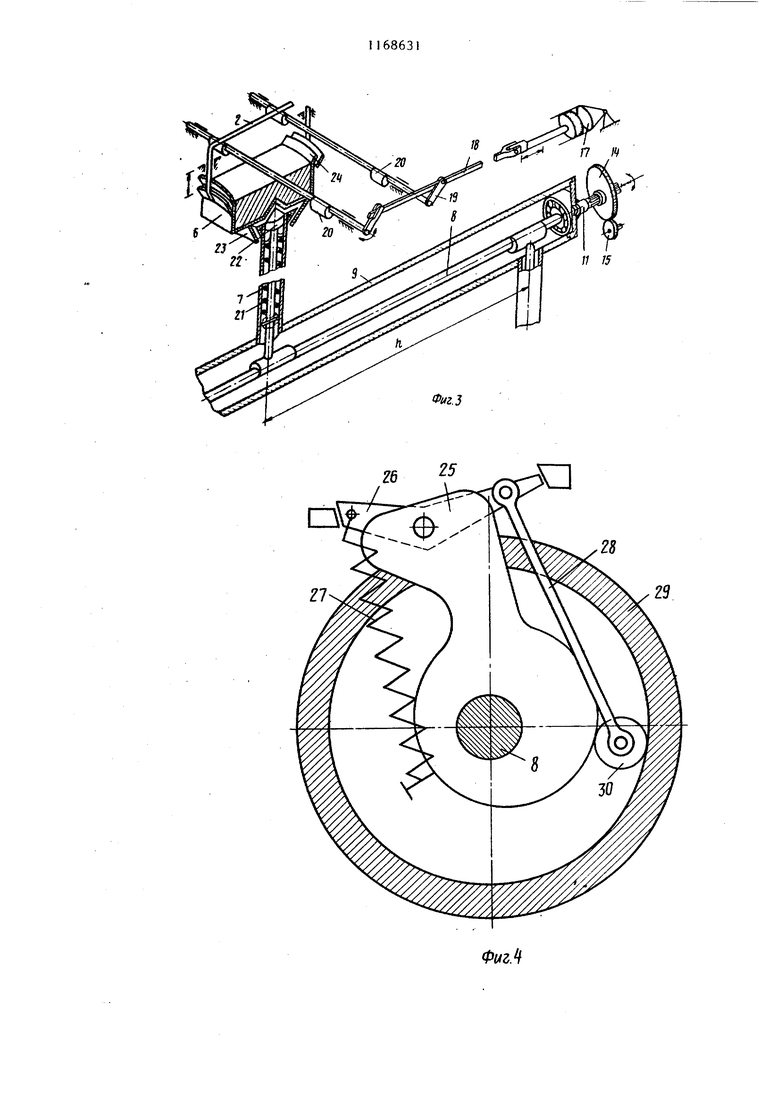
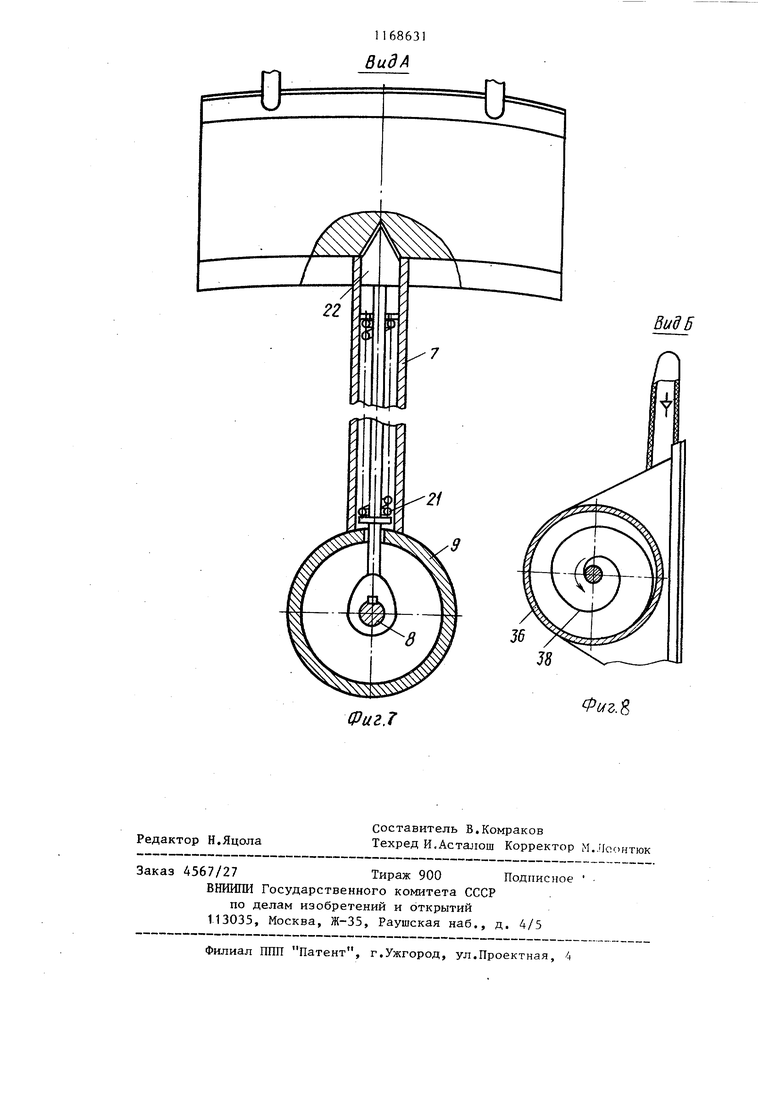
На фиг. 1 и 2 изображена конструктивная схема агрегата; на фиг о 3 устройство для перемещения контейнеров; на фиг. 4 - муфта автоматического включения фиксирующего механизма; на фиг. 5 - корпус агрегата с перегородкамиJ на фиг. 6 - конструкция автоматически закрывающихся штор; на фиг. 7 - вид А на фиго 1; на фиг. 8 - вид Б на фиг. 6.
Агрегат состоит из корпуса 1 цилиндрической формы с подвижными фиксирующимися держателями 2, ванн 3, камер 4 струйной очистки, позиций загрузки (.не показано с душевой системой 5, позиций слива раствора, устройства для перемещения контейнеров 6, выполненного в виде автооператора, включающего в себя захваты 7, концы которых имеют форму трапеции в поперечном сечении и изогнутую по винтовой линии в продольном сечении, расположенные в шахматном порядке по длине вала 8 в одной плоскости, жестко соединенные с полым валом 9, внутри которого расположен в подшипниках 10 кулачковьй вал 8 и шлицевой вал 11, жестко связанный с полым валом 9, механизма привода, обеспечивающего одновременно возврат но-1поступательное и вращательное движения автооператора и включающего в себя электромотор 12, силовой цилиндр 13 и шестерни 14 и 15, а также муфту 16 автоматического включения фиксирующего механизма,
Механизм подъема подвижных фиксирующих держателей 2 состоит из силового цилиндра 17, тяг 18, рычагов 19 поворота и кулачковых валов 20. Фиксирующий механизм (фиг. 3) содержит кулачковый вал 8, установленный внутри полого вала 9, и подпружиненный пружиной 21 фиксатор 22 с коническим концом, установленный внутри полого захвата 7.
К крьщ1кам и ко дну контейнера 6 приварены платики 23 захвата контейнера и платики 24 подвески контейнера с углом наклона, аналогичным углу наклона боковых стенок конца захвата 7 автооператора и подвижных держа312
телей 2 струйных камер и имеющих криволинейную форму, соответстЕующую траектории движения конца захвата 7 автооператора. Муфта 16 автоматического включения фиксирующего механизма (фиг. 4) сострит из кулачка 25, рычага 26, пружины 27, тяги 28, барабана 29, ролика 30 и вала 8. Кулачок 25 жестко соединен с полым
валом 9. Рычаг 26 имеет шарнирную связь с кулачком 25 и тягой 26. Кулачок 25 расположен эксцентрично относительно барабана 29.
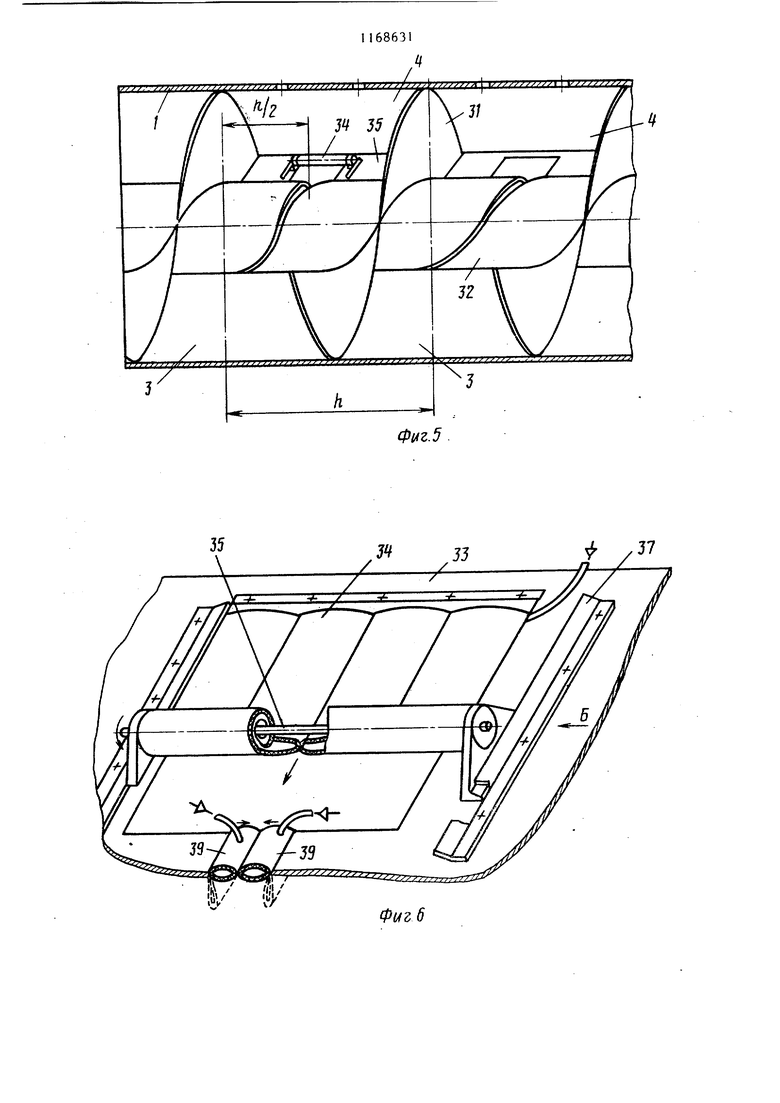
Камеры 4 струйной очистки и ванны 3 разделены перегородками 31, расположенными между корпусом 1 и цилиндрическим кожухом 32 (фиг. 5) по винтовой линии, а также продольными перегородками 33, в которых
имеются окна, автоматически закрывающиеся шторами 34 (фиг. 6) после совершения автооператором рабочего или холостого хода. Шторы 34 представляют собой эластичную оболочку
из прорезиненного или синтетического материала, стойкого к агрессивным средам, в исходном положении намотанную на вал 35, который установлен в опорах 36 и направляющих 37. В корпусе опоры 36 установлена спиральная пружина 38. Прорези в перегородках 33 и винтовая прорезь в кожухе 32 для прохода захватов 7 автооператора, выполненная по винтовой
линии, уплотняются также пневмоуп- лотнениями 39 из эластичного материала.
Для подачи моющего раствора в душевую систему 5 установлены насосы 40
(на фиг. 1 показан один насос). Машина - снабжена системами вентиляции и регенерации очищающих средств и системой автоматического управления (на фиг. 1 не показаны) Для обеспечения автоматического управления работой автооператора установлены упоры 41 и концевые выключатели 42. Машина работает следующим образом: При нажатии кнопки Пуск на пульте управления начинает вращаться электромотор 12 и двигаться поступательно силовой цилиндр 13 (фиг.1). Вращение от электромотора через ведущую шестерню 14 и ведомую шестерню 15 передается шлицевому валу 11, получающему в то же время поступательное перемещение от силового цилиндра 13, и шлицевой вал 11 вместе с полым валом 9, а также захваты 7 совершают в результате сложные движения по винтовой линии на шаг, величина которого определяется расстоянием между двумя соседними позициями. В начале цикла автооператор сове шает холостой ход и его крайняя левая штанга заходит своим захватом под платики 23 к крьш1ке контейнера 6 При этом рычаг 26 муфты 16, упираясь в левый упор 41 одним из своих концов, поворачивается на своей оси, преодолевая натяжение пружины 27, и через тягу 28 перемещает ролик 30, заклиненный между барабаном 29, и кулачком 25. При этом кулачок 25 расклинивается и разобщает валы 9 и 8, кулачковый вал 8 останавливается, а так как вал 9 пр должает движение, то кулачки вала 8 нажимают на фиксатор 22, который, преодолевая сопротивление пружины 21, своим конусом заходит в кони ческое гнездо в крышке контейнера 6 обеспечивая жесткое соединение контейнера с захватом 7 автооператора. После того, как автооператор своим крайним левым захватом 7 захватил контейнер на позиции загрузки (не показан), автоматически вклю чается реверс, автооператор переносит контейнер с позиции загрузки на .позицию А струйной очистки, совершая поворот на 180°„ Рабочий ход автооператора совершается в направлении, противоположном направлению холостого хода. При этом рычаг 26 (фиг. 4) отходит от левого упора 41 (фиг. 1) и под действием пружины 27 (фиг. 4) поворачивается против часо вой стрелки, благодаря чему ролик 3 заклинивается между барабаном 29 и кулачком 25. Вал 8 начинает вращать ся вместе с валом 9, удерживая фиксатор 22 в положении фиксации во время перемещения контейнера 6 на следующую позицию. При подходе к по зиции 4 струйной очистки протиноположный конец рычага 26 поворачиЕ1ае1- ся по часовой стрелке правым упором 41, и вал 8 опять останавливается, его кулачки выходят из контакта с фиксаторами 22, которые возвращаются в исходное положение пружинами 2 и освобождают контейнер 6. Автооператор останавливается и начинает движение в противоположном направлении, совершая холостой ход. При этом захват 7 автооператора выходит из-под платиков 23 захвата контейнера 6, который подхватывается фиксирующими держателями 2, поднимающимися при заходе в них платиков 24 подвески контейнера, прикрепленных ко дну контейнера, за счет поворота контактирующих с ними кулачков валов 20, вращение которым сообщается от силового цилиндра 17 через тяги 18 и рычаги 19 поворота.. По окончании холостого хода автооператора его крайний левый захват перемещается на позицию загрузки, захватывает следующий контейнер, а второй диаметрально противоположны захват захватывает контейнер в камере струйной очистки. При соверщении следующего рабочего хода автооператор соответственно перемещает контейнеры с позиции загрузки на позицию 4 струйной очистки, а с позиции 4 струйной очистки в первую ванну 3. По окончании рабочего хода и в начале холостого хо.да захваты 7 автооператора оставляют контейнеры 6 на позициях и перемещаются на предьздущие позиции и так, происходит до тех пор, пока каждый контейнер не пройдет полный цикл обработки. За счет сочетания погружного и струйного методов очистки производительность увеличивается на 30-40%, обеспечивается высокое качество и снижается энергоемкость процесса.
ja.
У ч
f
-yL гfff
ч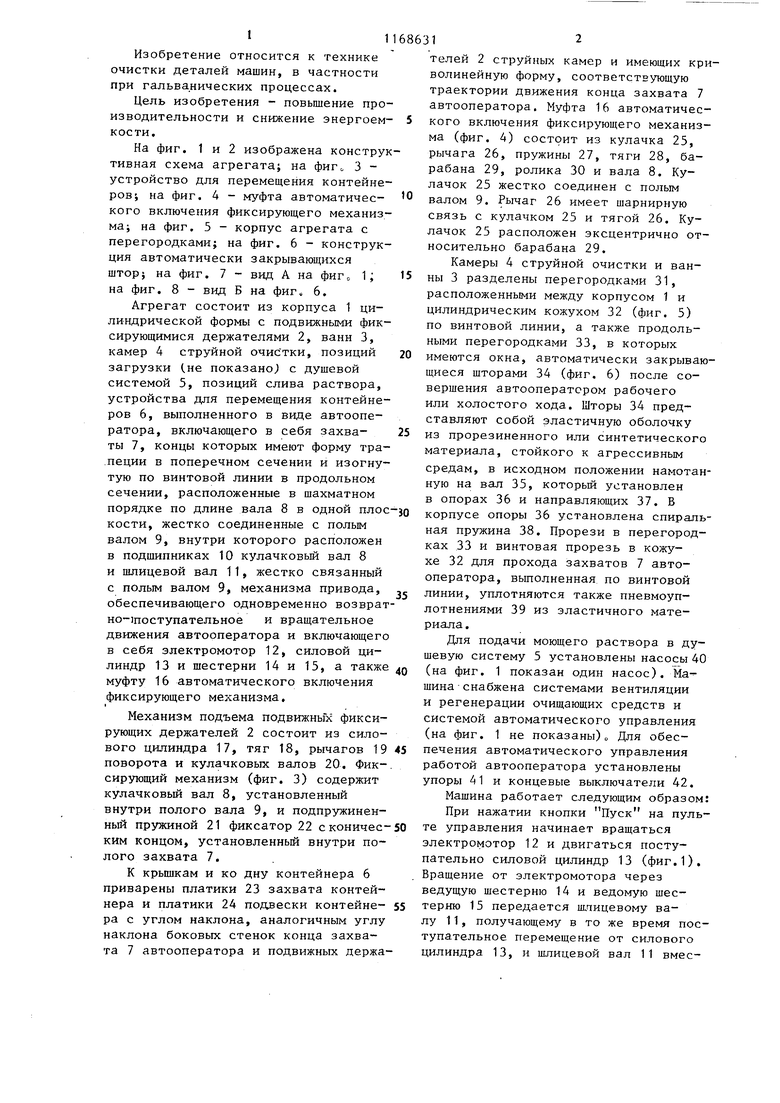
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочное устройство | 1987 |
|
SU1509222A1 |
| АГРЕГАТ ДЛЯ ИЗГОТОВЛЕНИЯ ШТУЧНЫХ ИЗДЕЛИЙ | 1966 |
|
SU187619A1 |
| УКЛАДОЧНЫЙ АГРЕГАТ | 1968 |
|
SU210738A1 |
| Автоматическая поточная линия дляСбОРКи НАРучНыХ чАСОВ | 1976 |
|
SU798685A1 |
| Автооператор | 1983 |
|
SU1144842A2 |
| Гальваническая автооператорная линия для обработки мелких деталей | 1981 |
|
SU986972A1 |
| ПРЕССОВЫЙ АГРЕГАТ | 1990 |
|
RU2043815C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Установка для нанесения покрытий | 1983 |
|
SU1142386A2 |
| Установка для очистки изделий | 1990 |
|
SU1756381A1 |
1. АГРЕГАТ ДЛЯ ХИМИЧЕСКОЙ. ПОДГОТОВКИ ПОВЕРХНОСТИ, содержащий ряд ванн, расположенных над ними струйных камер, контейнеры и устройство для перемещения контейеров, отлич ающийся тем, что, с целью повышения производительности и снижения энергоемкости, устройство для перемещения контейнеров выполнено в виде автооператора, снабженного полым валом с захватами трапециедальной формы на концах, расположенными в шахматном порядке, приводом для одновременного вращательного и возвратно-поступательного движений автооператора и фиксирующим механизмом с муфтой, а в струйные камеры встроены держатели с опорными пластинами по форме концов захватов, при этом фиксирующий механизм выполнен в виде кулачкового механизма, смонтированного внутри полого вала автооператора, и подпружиненного фиксатора, установленного внутри полого захвата, а держатели закреплены с возможностью вертикального перемещения от кулачкового механизма. СО 2. Агрегат по п. 1, отличающийся тем, что струйные камеры и ванны разделены перегородками, вьшолненными по винтовой линии, а также продольными перегородками с окнами со шторами. о СХ) Gfi со
.1
fl
V7/
/Л
Фиг. 2
17
/
и
R
/2
/ /
Ч
/y////////v
/
/J.
/(
/
о
-8
о /////////
///////,
J444444
L
а
27
гэ
1168631
ЗидА Фиг. Фиг.7 В ид Б
| МОЕЧНАЯ МАШИНА СТРУЙНОГО ТИПА ДЛЯ ОЧИСТКИДЕТАЛЕЙ^?'-'Бл;-10_;;?КА_ | 0 |
|
SU304629A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Моечная машина для очистки деталей | 1976 |
|
SU659211A1 |
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
