1. Изобретение относится к обработке резанием и найдет применение в ма шиностроении при изготовлении деталей, ограниченных некруглыми цилиндрическими и коническими поверхностями, а также эксцентрично расположенными круглыми поверхностями. Целью изобретения является расширение технологических возможностей станка для обработки некруглых повер ностей, формообразование профилей которых требует настройки передаточного отношения цепи между обоймой и шпинделем, не равного числу выступов у обрабатываемого профиля, например, некруглых конических поверхностей и цилиндрических эксцентрично, расположенных поверхностей с неправильным профилем. На фиг,1 изображена структурная схема предлагаемого станка; на фиг,2 - одна из возможных наладок обрабатывающего блока, В корпусе 1 с возможностью вращения вокруг оси 2 смонтирована обой ма 3, несущая шпиндель 4, эксцентри но расположенный относительно оси -2 Шпиндель 4 установлен эксцентрично во втулке 5 , которая имеет возможность поворота в обойме 3 вокруг оси, не совпадающей с осью 2, и обеспечивает настройку величину эксцентриситета - расстояние между осями шпинделя и обоймы. Для сообщения шпинделю 4 и обойме 3 вращательных .движений служит привод 6, управляемый, например, системой числового программного управления (ЧПУ ), В цепи, соединяющей привод 6 с обоймой, установлена муфта 7, позволяющая отключить обой му от привода. Аналогичная муфта 8 установлена в цепи вращения шп деля 4. Шпиндель и обойма соединены между собой кинематической цепью с орг ном настройки9 для задания соотношения их угловых скоростей,необходимого для формообразования профиля некруг лой поверхности. Станок снабжен механизмом 10 фик сации обоймы 3 относительно корпуса и механизмом 11 фиксации шпиндел относительно обоймы. На суппорте 12 установленобрабаты-: 55 обоймы.
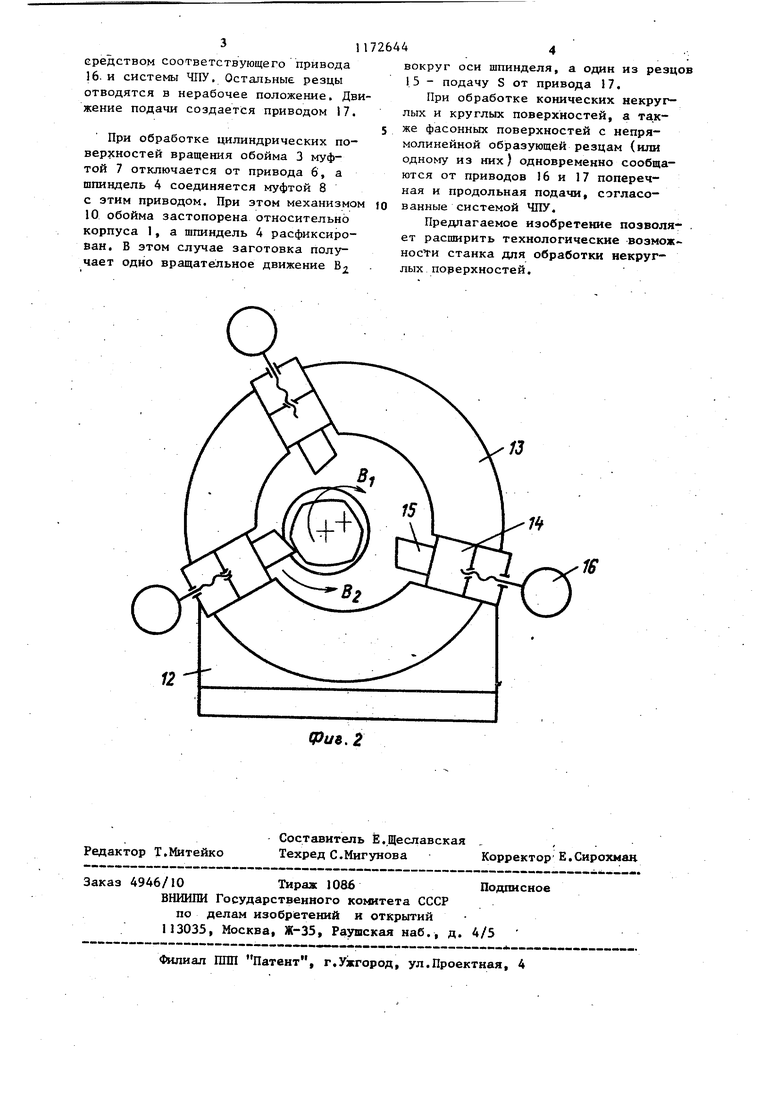
вающий блок 13, несущий сменные ка- ретки 14 с резцами 15 или другими инструментами и приводы 16 их радищейся вокруг оси обоймы, осуществляется одним из резцов, радиальное положение которого настраивается по4ального перемещения, управляемые от системы ЧПУ. Каретки 14 установлены на блоке I3 по окружности с центром на оси 2 вращения обоймы с возможностью регулирования при настройке их углового положения относительно друг друга. Например, при обработке правильных профилей резцедержатели устанавливаются равномерно по окружности, а при обработке неправильных профилей - неравномерно. Блок 13 обеспечивает возможность установки на нем различного количества кареток с инструментами в зависимости от формы обрабатываемой поверхности. Дпя продольного перемещения суппорта 12 служит привод 17, управляемый системой ЧПУ, . Для закрепления длинных изделий используется задняя бабка 18, во втулке 19 которой смонтирован механизм 20 регулировки эксцентриситета между центром 21 и осью вращения втулки 19. Центр 21 установлен соосно со шпинделем 4. Втулка 19 кинематически с передаточным отношением, равным единице, связана с обоймой 3, При обработке некруглых цилиндрических поверхностей от привода 6 . получает взаимосвязанные вращательные движения .В и В обойма Зи шпиндель 4 соответственно. При этом муфты 7 и 8 включены, а механизмы 10 и 11 находятся в положении, обеспечивающем свободное вращение обоймы и шпинделя. В результате шпиндель 4 с заготовкой получают планетарное движение, благодаря которому резцы 15 формируют некруглый профиль. Его форма определяется передаточным отношением органа настройки 9, количеством, угловым и радиальным расположением резцов 15 на блоке 13. Дпя формообразования поверхности по длине изделия суппорт 12 получает продольное движение подачи S от привода 17, скорость которой задается системой ЧПУ. При обработке эксцентричных цилиндрических поверхностей посредством муфты 8 размыкается цепь вращения шпинделя 4 и он стопорится механизмом фиксации II относительно Обработка заготовки, вращаю3П
средством соответствующего привода 16. и системы ЧПУ. Остальные резцы отводятся в нерабочее положение. Движение подачи создается приводом 17.
При обработке цилиндрических поверхностей вращения обойма 3 муфтой 7 отключается от привода 6, а шпиндель 4 соединяется муфтой 8 с этим приводом. При этом механизмом 10 обойма застопорена относительно корпуса 1, а шпиндель 4 расфиксирован. В этом случае заготовка получает одно вращательное движение В
26444;
вокруг оси шпинделя, а один из резцов 15 - подачу S от привода 17.
При обработке конических некруглых и круглых поверхностей, а также фасонных поверхностей с непрямолинейной образующей резцам (или одному из них) одновременно сообщаются от приводов 16 и 17 поперечная и продольная подачи, согласованные системой ЧПУ.
Предлагаемое изобретение поэволя- . ет расширить технологические возможности станка для обработки некруг- лых поэерхностей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления токарным станком | 1986 |
|
SU1404269A1 |
| Способ обработки профильных торцовых поверхностей | 1990 |
|
SU1743703A1 |
| Станок для обработки валов | 1977 |
|
SU733878A1 |
| Станок для обработки резьб и шлицев переменного шага | 1981 |
|
SU992143A2 |
| Зубофрезерный станок | 1977 |
|
SU864692A1 |
| Станок для обработки циклоидальных профилей | 1974 |
|
SU498098A1 |
| Устройство для обработки многогранников | 1976 |
|
SU632492A1 |
| Универсальный зубообрабатывающий станок с ЧПУ | 1987 |
|
SU1715520A1 |
| СТАНОК ДЛЯ ОБРАБОТКИ АРОЧНЫХ ЗУБЬЕВ ЦИЛИНДРИЧЕСКИХ КОЛЕС | 1997 |
|
RU2123915C1 |
| Станок для обработки некруглых цилиндрических поверхностей | 1987 |
|
SU1421462A1 |
СТАНОК ДЛЯ ОБРАБОТКИ НЕКРУГЛЫХ ПОВЕРХНОСТЕЙ, содержащий корпус, суппорт с обрабатывающим блоком, установленную в корпусе с возможностью вращения от привода обойму с размещенной в ней с возможностью поворота втулкой, несущей шпиндель, ось которого имеет эксцентриситет относительно оси вращения обоймы, причем привод посредством кинематической цепи, имеющей орган настройки, связан со шпинделем, о тличающийся тем, что, с целью расширения технологических возможностей, станок снабжен механизмами фиксации обоймы относительно корпуса и шпинделя относительно обоймы, муфтами, установленными в кинематических цепях, связывающих привод со шпинделем и обоймой, причем обрабатывающий блок .выполнен в виде расположенных по окружности с центром на оси вращения обоймы и имею щих возможность регулирования угло(Л вого и радиального положения инструментальных кареток, которые снаб- . жены собственными приводами. О ю О) 4ib 
12
ipt/6.2
13
| Патент США № 3302498, кл | |||
| Машина для разделения сыпучих материалов и размещения их в приемники | 0 |
|
SU82A1 |
