соединен с выходом датчика фазного тока статора, другой его вход - с выходом датчика фазного напряжения статора, а выход блока вычисления ЭДС - с первым входом введенного четвертого элемента сравнения, установленного на входе пропоргщональноинтегрального регулятора, информационньй вход первого элемента сравнения- соединен с вторым выходом датчика напряжения статора, задающий вход первого элемента сравнения с первым выходом блока задания на3516
пряжения, один вход первого блока произведения соединен с вторым выходом блока задания, а другой вход соединен с выходом первого пропорцио.нально-интегрального регулятора, выход первого блока произведения соединен с задающим входом четвертого элемента сравнения, выход четвертого пропорционально-интегрального регулятора соединен с другими входами второго и третьего блоков произведения, выходы которых образуют выходы блока преобразования координат.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ДВИГАТЕЛЯ | 2010 |
|
RU2422979C1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 2006 |
|
RU2313895C1 |
| Электропривод переменного тока | 1985 |
|
SU1314428A1 |
| Электропривод | 1983 |
|
SU1167688A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2006 |
|
RU2320073C1 |
| Устройство для управления двигателем двойного питания | 2016 |
|
RU2625720C1 |
| Устройство для измерения скорости вращения асинхронного двигателя с фазным ротором | 1981 |
|
SU1010564A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ДВОЙНОГО ПИТАНИЯ | 2011 |
|
RU2477562C1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Электропривод переменного тока | 1987 |
|
SU1432711A1 |
1. Способ управления однофазной машиной двойного питания, при котором измеряют вьтрямпенное напряжение на обмотке статора и сравнивают с заданной величиной, измеряют фазные токи ротора и сравнивают их со своими заданиями, по результату этого сравнения формируют фазные токи в обмотках ротора, о т л и ч а ю щ и и с я тем, что, с целью улучшения Э1 р гетических показателей, измеряют фазную ЭДС в обмотке статора, результат сравнения измеренного выпрямленного напряжения на обмотке; статора с заданной величиной модулируют с эталонной частотой, после чего сравнивают его с измеренной фдз- ной ЭДС в обмотке статора, результат этого сравнения модулируют с частотой вращения ротора в противофазе с ЭДС ротора, пропорционально полученным результатам данной модуляции изменяют фазные токи в обмотках ротора. 2. Устройство для управления однофазной машиной двойного питания, содержащее управляемый статический преобразователь частоты в цепи ротора машины, блок задания эталонных напряжения и частоты, датчики углово-го положения ротора, фазных токов ротора, фазного тока статора и фазного напряжения статора, первьй, второй и третий элементы сравнения с заШ дающими и информационными входами, установленными на входах соответст(Л вующих пропорционально-инте-гральных регуляторов, преобразователь координат, два из четырех входов которого соединены с соответствующими выхода- ми датчика углового положения ротора, а выходы преобразователя координат :оединены с задакнцими входами второ го и третьего элементов сравнения, со установленных на входах пропорхщоел нально-интегральных регуляторов фазных токов ротора, выходы которых а) соединены с соответствующими входами блока управления статическим преобразователем частоты, отличающееся тем, что, с целью улучщения энергетических и снижения массогабаритных показателей, в него введены четвертый пропорционально-интегральный регулятор с четвертым элементом сравнения на входе, первый, второй и третий блоки произведения, второй и третий из которых образуют преобразователь координат, блок вычисления ЭДС, один вход которого
1
Изобретение относится к электротехнике и может быть использовано в установках автономного питания однофазных потребителей ..переменного тока от машины двойного питания с -од ной обмоткой на статоре,и многофазным ротором.
Цель изобретения - улучшение энергетических и снижение массогабаритных показателей.
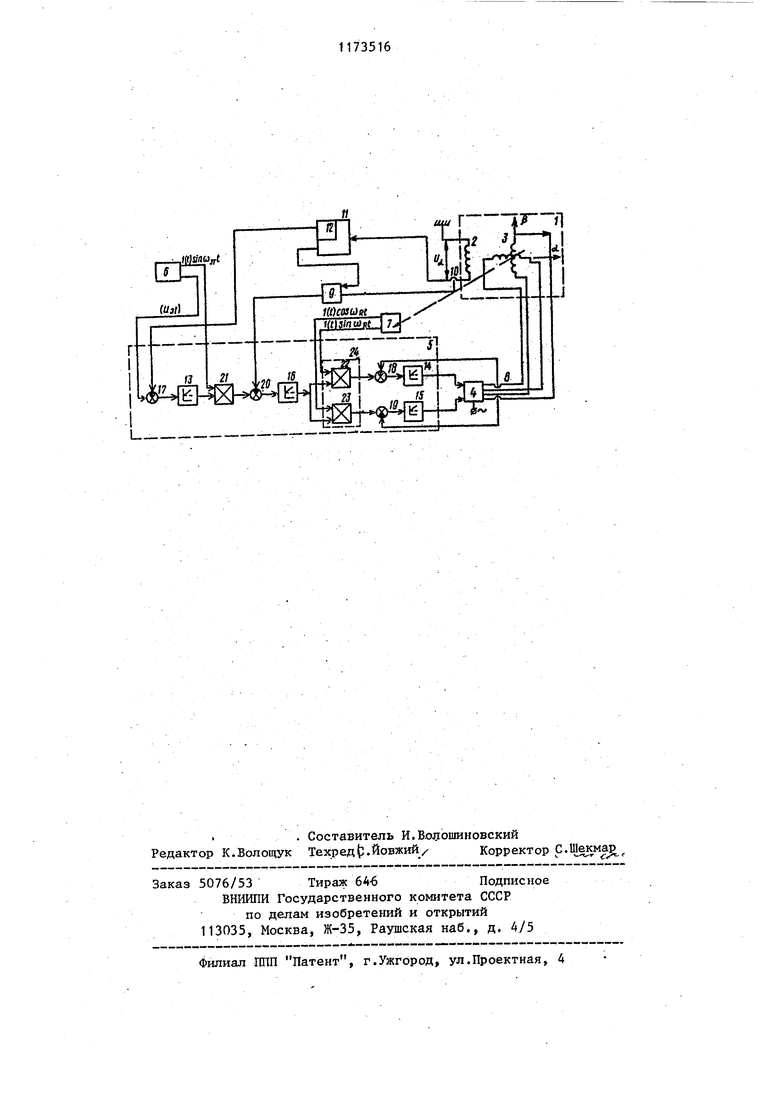
Па чертеже представлено устройство для управления однофазной машиной двойного питания,
Устройство содержит машину двойного питания (МДП) 1 с однофазным статором 2 и двумя обмоткаг-ш на роторе 3, выводы которых подключены к выходу статического преобразователя частоты (СПЧ) 4, управляющий вход которого образован входом блока системы импульсно-фазового управления и соединен с выходами блока регулирования 5, имеющего первый и второй задающее входы, третий и четвертый опорные входы, пятый, шеетой, седьмой и восьмой информаодонмые. Блок 6 задания амплитуды и частоты напряжения соответствующиMii выходами подключен к первому и второму входам блока 5. Датчик углового положения ротора 7, являющийся генератором опорных синусоидальных напряжений, соответствующими выходами подключен к третьему и четвертому опорным входам блока 5. Датчик 8 фазных токов ротора соответствующими выходами подключен к информационным входам 7 и 8 блока 5. Блок 9 вычисления ЭДС выходами подключен к информационному входу б блока 5, первым входом блок 9 подсоединен к выходу датчика фазного тока статора 10, а вторым входом - к первому выходу датчика напряжения статора 11, второй выход которого соединен с информационным входом блока 5. В. датчике напряжения статора 11 на втором выходе устайовлен выпрямитель 12.
Блок регулирования 5 содержит первый, второй, третий и четвертый пропорционально-интегральные регуляторы (пи-регуляторы) 13 - 16, пер- вый, второй, третий и четвертый элементы сравнения 17 - 20, установленные соответственно на входах ПИ-регуляторов 13 - 16 и имеющие по одному информационному и одному задающему входу, первый, второй и третий блоки произведения 21 - 23, имеющие по два входа и одному выходу, причем второй 22 и третий 23 блоки произведения образуют блок 24 преобразователя координат.
Задающий вход первого элемента сравнения 17 и один из входов первого блока произведения 21 образуют соответственно первьш и второй задающие входы блока 5. Один из входов блока произведения 22 и 23 образуют соответственно третий и четвертый опорные входы блока 5, информационные входы элемента сравнения 17, 20,
18 и 19 образуют соответственно пятый, шестой, седьмой и восьмой инфор мационные входы блока 5. Выход ПИ-ре гулятора 13 соединен с другим входом блока произведения 21, выход которого соединен с задающим входом четвер того элемента сравнения 20, выход пи-регулятора 16 соединен с другими входами блоков произведения 22 и 23, вькоды которых соединены соответственно с задающими входами второго 18 и третьего 19 элементов сравнения, выходы пи-регуляторов 14 и 15 образуют выходы блока регулирования 5. Блок 6 содержит задатчйк амплитуды напряжения, например, потенциометрического типа, образующий первый выход этого блока, а также задатчик частоты напряжения, выполненный в ви де генератора синусоидального напря жения нормированной амплитуды, выход которого образует второй выход блока 6. Устройство для управления однофазной ЩИ функционирует следующим образом. Напряжение и ток с обмотки статора ( i) подают на входы блоков 1 и 17, на выходе блока 16 формируют напряжение, пропорциональное значению .составляющей тока ротора по сетиобмот ки статора ,призьшолнении условия: составляющая магнитного потока ротора по оси /3, перпендикулярной оси о, всегда равна нулю. Полученное напряжение подают на входы блоков 22 и 23 на которые также подают напряжения с выхода датчика углового положения ротора, пропорциональные sinu)nt и cosiO.,t, где Wfj - частота вращения ротора. С выходов блоков 22 и 23 соответственно через блоки 18, 14 и 19, 15 управляющие напряжения поступают на вход СПЧ, с выхода которого осуществляется питание обмоток ротора МДП. Тогда в обмотке статоре наводится ЭДС с частотой, равной эталонной 10зт которая задается в блоке 6 в виде гармонического 16 напряжения единичной амплитуды и эталонной частоты: 1(t) sinWaT t. В этом же блоке 6 формируется эталонное значение амплитуды напряжения UQ на зажимах обмотки 2 статора МДП 1. Контроль фазной ЭДС, наведенной в обмотке 2, может осуществляться непосредственным измерением или в процессе вычисления в блоке 9 в виде разности между напряжением и, измеренным и преобразованным в блоке 11, и падением напряжения на активном сопротивлении этой же обмотки 2. Результат сравнения измеренного вьшрямпенного напряжения на обмотке статора с заданной величиной получают на выходе элемента сравнения 17, который после преобразования в пропорционально-интегральном регуляторе 13 сначала модулируют в блоке 21 с эталонной частотой ujjT, а потом сравнивают в элементе сравнения 20 с измеренной фазной ЭДС в обмотке статора, поданной с выхода блока 9. Результат данного сравнения преобразуют в про-порционапьно-интегральном регуляторе 16, а затем модулируют в блоке 24 с частотой, равной измеренной частоте вращения ротора ю и сформированной в блоке 7 в виде двух гармонических напряжений единичной амплитуды, сдвинутых по фазе на 90 эл. град.: 1(t) coswgt + j1(t)sinwp t в случае двух обмоток на роторе, а при трех обмотках сдвиг по фазе должен быть 120 эл. град. Причем эта модуля1р1я производится в противофазе с ЭДС, наведенной в обмотке ротора. При изменении токов в обмотках ротора пропорционально сформированным таким образом управляющим напряжениям происходит- компенсация поперечной составляющей магнитного потока ротора и, как следствие этого, компенсация поперечной составляющей ЭДС, наведенной в обмотке статора.
r-i
| Устройство для управления асинхронным электродвигателем с фазным ротором | 1980 |
|
SU928586A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радин В.И., Загорский А.Е., Шакарян Ю.Г | |||
| Управляемые электрические генераторы при переменной частоте | |||
| М., Энергия, 1978, с | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
