2. Устройство для перегрузки с судов крупных грузовых емкостей, содержащее смонтированную на опорах перегрузочную эстакаду, несущую грузозахватный орган, смонтированный с возможностью перемещения вдоль эстакады, отличающееся тем, что, с целью повыщения эффективности, оно снабжено вертикальными направляющими, установленными на дне водоема, в которых расположены опоры эстакады, каждая из которых смонтирована на балластируемом понтоне.
3. Устройство для перегрузки с судов крупных грузовых емкостей, содержащее смонтированную на опорах перегрузочную эстакаду, несущую грузозахватный орган, смонтированный с возможностью перемещения вдоль эстакады, отличающееся тем, что, с целью повыщения эффективности, одна из сторон эстакады щарнирно закреплена на опоре, установленной на береговой черте, а другая сторона эстакады жестко закреплена на опоре, которая с.монтирована на балластируемом понтоне.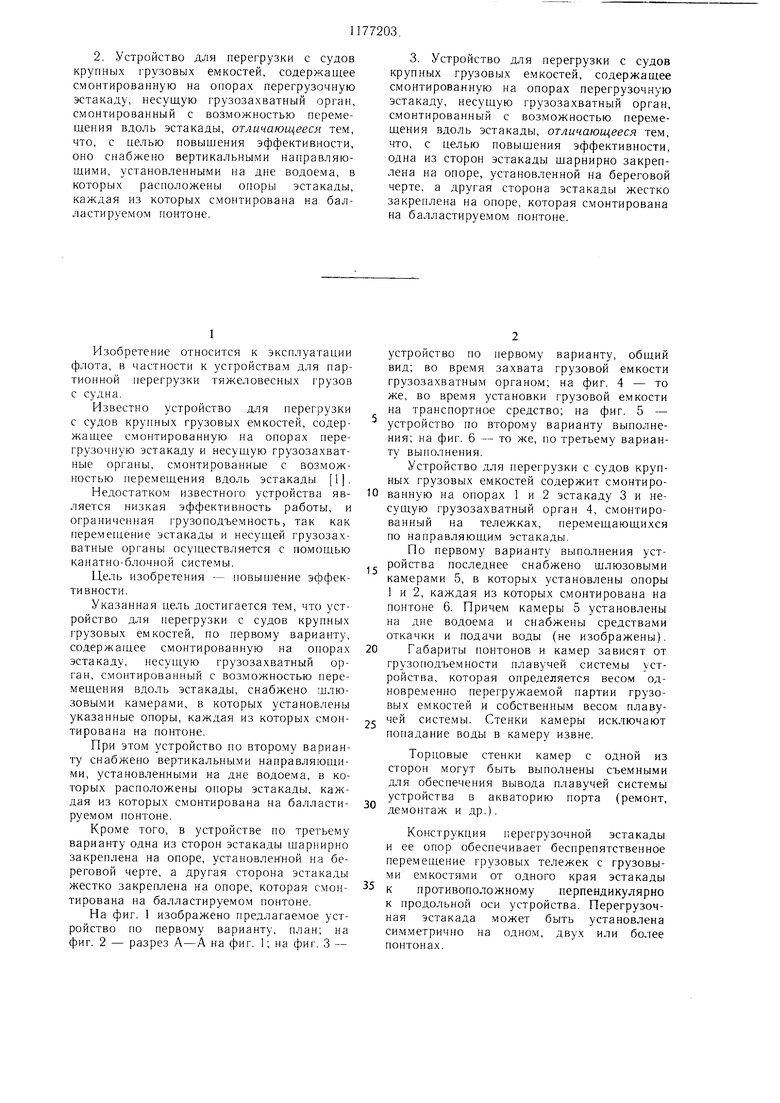
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перегрузки с судов крупных грузовых емкостей | 1976 |
|
SU608733A1 |
| ПЛАВУЧИЙ ПЕРЕДАТОЧНЫЙ ДОК | 2006 |
|
RU2310578C1 |
| ПЛАВУЧИЙ ПЕРЕДАТОЧНЫЙ ДОК | 2016 |
|
RU2615026C1 |
| Перегрузочная система для судов с крупными грузовыми модулями | 1977 |
|
SU735477A1 |
| Устройство для перегрузки навалочных грузов из железнодорожных вагонов в транспортные суда | 1981 |
|
SU1013374A1 |
| Передаточный судоподъемник | 1986 |
|
SU1326497A1 |
| Устройство для перегрузки с судна крупных грузовых емкостей | 1975 |
|
SU647210A1 |
| Построечно-спусковой комплекс | 1989 |
|
SU1712239A1 |
| Устройство для подъема тяжеловесных крупногабаритных грузов | 1990 |
|
SU1791350A1 |
| Перегрузочное устройство для судов с грузовыми модулями | 1976 |
|
SU676521A1 |
1. Устройство для перегрузки с судов крупных грузовых емкостей, содержащее смонтированную на опорах перегрузочную эстакаду, несущую грузозахватный орган, смонтированный с возможностью перемещения вдоль эстакады, отличающееся тем, что, с целью повышения эффективности, оно снабжено щлюзовыми камерами, в которых установлены указанные опоры, каждая из которых смонтирована на понтоне. и (Л ю о 00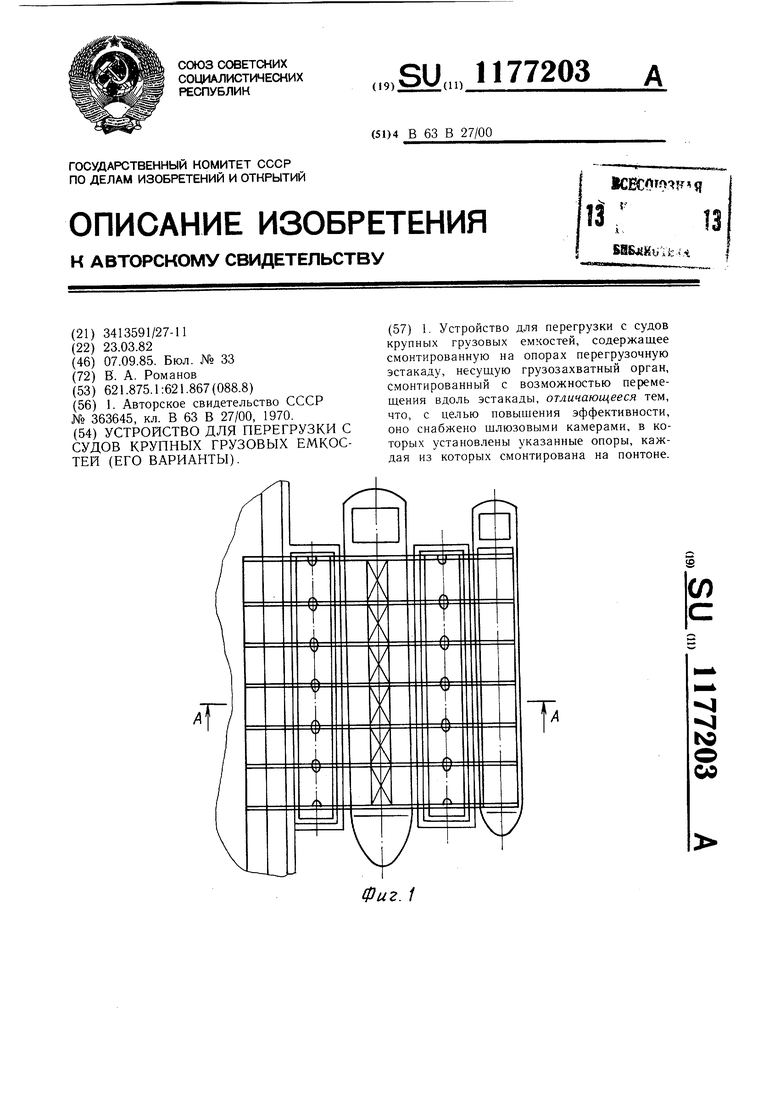
1
Изобретение относится к эксплуатации флота, в частности к устройствам для партионной перегрузки тяжеловесных грузов с судна.
Известно устройство для перегрузки с судов крупных грузовых емкостей, содержащее смонтированную на опорах перегрузочную эстакаду и несущую грузозахватные органы, с.монтированные с возможностью перемещения вдоль эстакады 1.
Недостатком известного устройства является низкая эффективность работы, и ограниченная грузоподъемность, так как перемещение эстакады и несущей грузозахватные органы осуществляется с помощью канатно-блочной системы.
Цель изобретения - ювышение эффективности.
Указанная цель достигается те.м, что устройство для перегрузки с судов крупных грузовых емкостей, по первому варианту, содержащее смонтированную на опорах эстакаду, несущую грузозахватный орган, смонтированный с воз.можностью перемещения вдоль эстакады, снабжено шлюзовыми камерами, в которых установлены указанные опоры, каждая из которых смонтирована на понтоне.
При этом устройство по второму варианту снабжено вертикальными направляющими, установленными на дне водоема, в которых расположены опоры эстакады, каждая из которых смонтирована на балластируемом понтоне.
Кроме того, в устройстве по третьему варианту одна из сторон эстакады щарнирно закреплена на опоре, установленной на береговой черте, а другая сторона эстакады жестко закреплена на опоре, которая смонтирована на балластируемом понтоне.
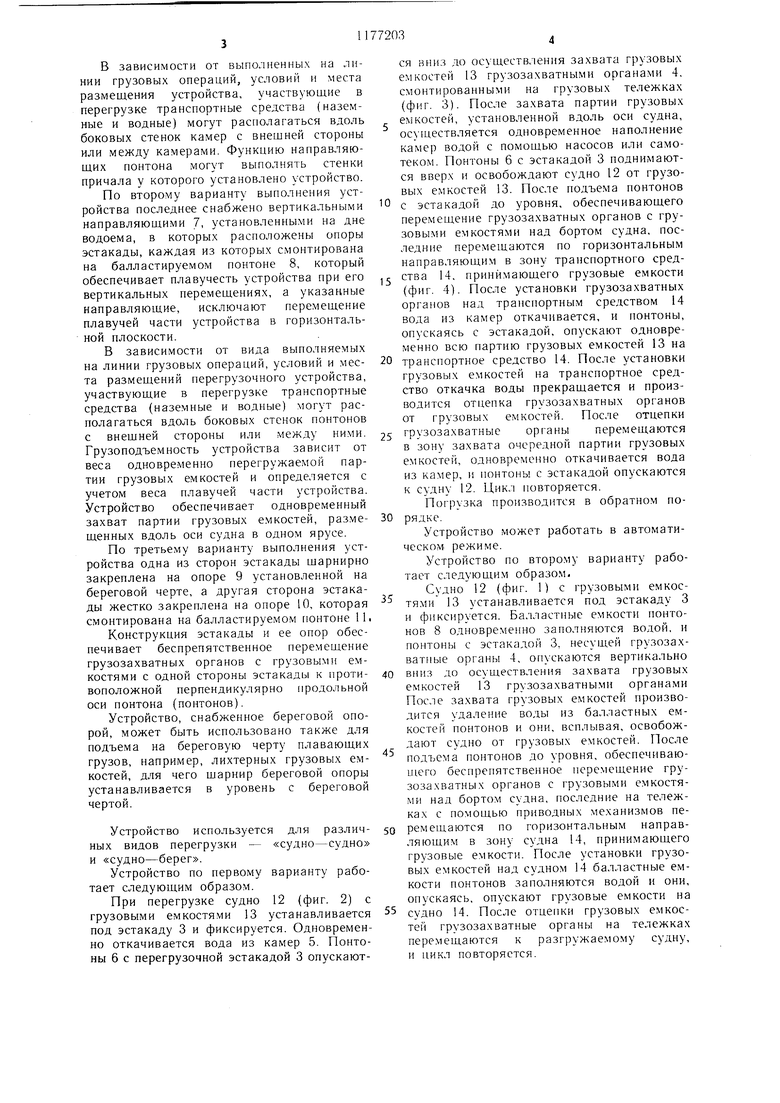
На фиг. 1 изображено предлагаемое устройство по первому варианту, план; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 -
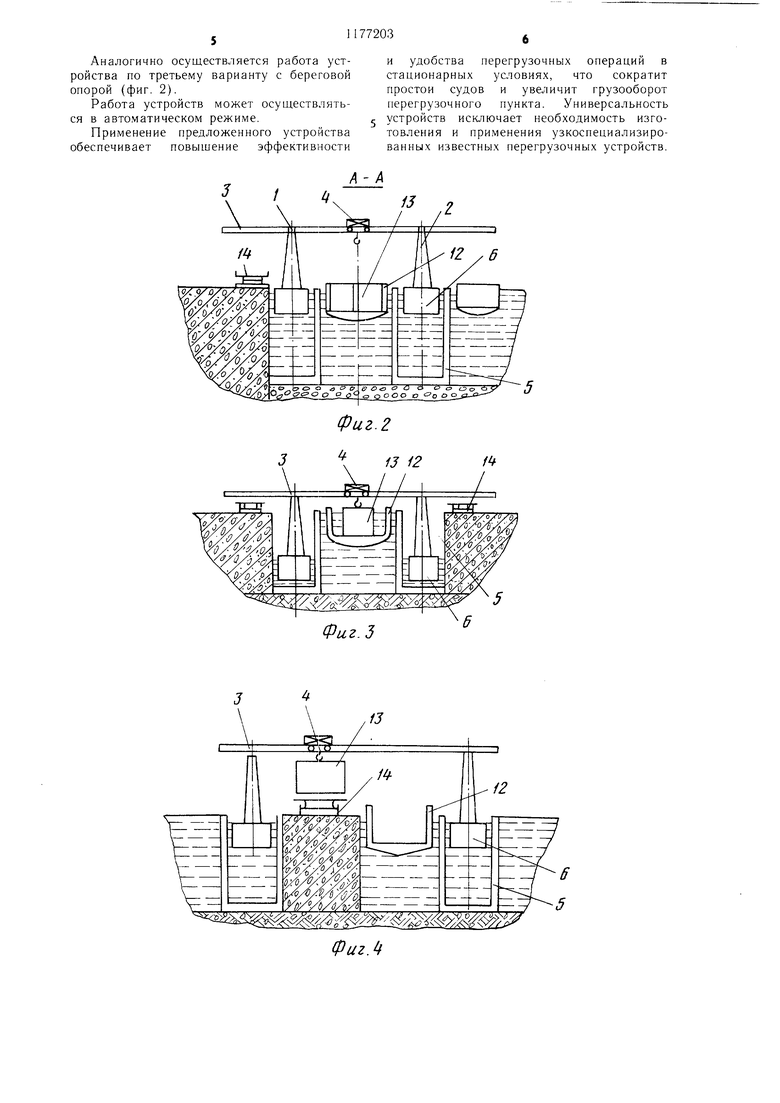
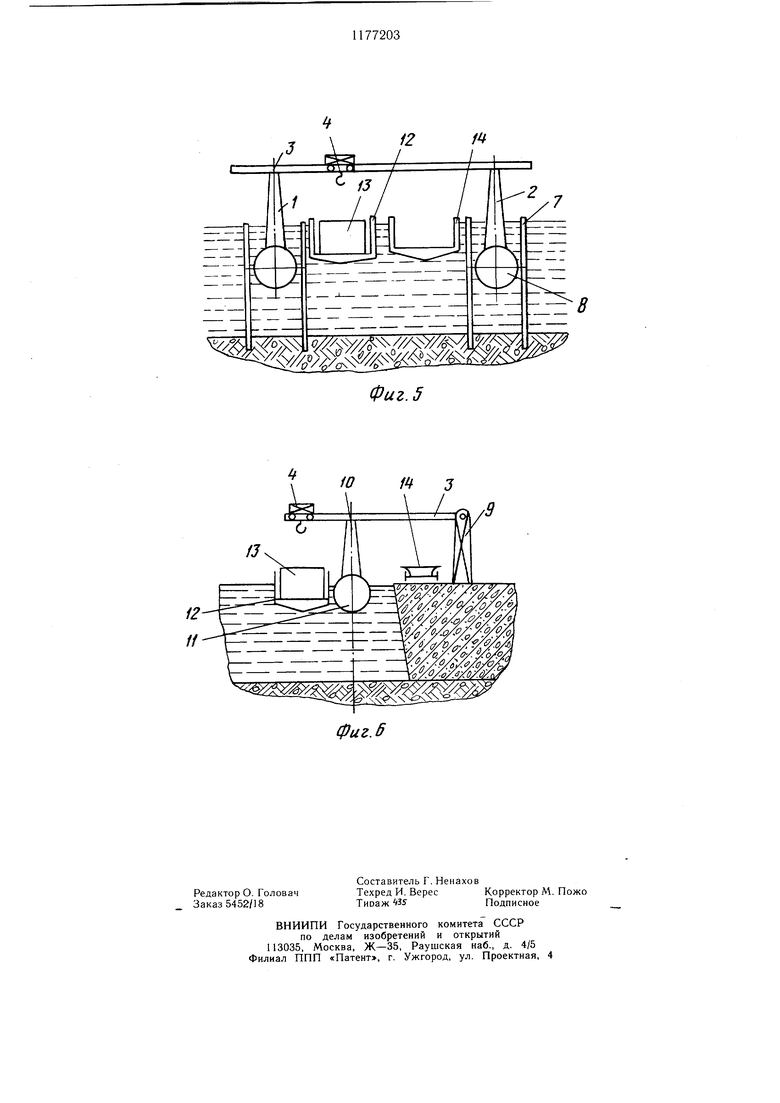
устройство по первому варианту, общий вид; во время захвата грузовой емкости грузозахватным органом; на фиг. 4 - то же, во время установки грузовой емкости на транспортное средство; на фиг. 5 - устройство по второму варианту выполнения; на фиг. 6 - то же, по третьему варианту выполнения.
Устройство для перегрузки с судов крупных грузовых емкостей содержит смонтированную на опорах 1 и 2 эстакаду 3 и несущую грузозахватный орган 4, смонтированный на тележках, перемещающихся по направляющим эстакады.
По первому варианту выполнения устройства последнее снабжено щлюзовыми камерами 5, в которых установлены опоры 1 и 2, каждая из которых смонтирована на понтоне 6. Причем камеры 5 установлены на дне водоема и снабжены средствами откачки и подачи воды (не изображены).
0 Габариты понтонов и камер зависят от грузоподъемности плавучей системы устройства, которая определяется весо.м одновременно перегружаемой партии грузовых емкостей и собственным весом плавучей системы. Стенки камеры исключают попадание воды в камеру извне.
Торцовые стенки камер с одной из сторон могут быть выполнены съемными для обеспечения вывода плавучей системы устройства в акваторию порта (ремонт.
демонтаж и др.).
Конструк 1,ия перегрузочной эстакады и ее опор обеспечивает беспрепятственное перемещение грузовых тележек с грузовыми емкостями от одного края эстакады к противоположному перпендикулярно к продольной оси устройства. Перегрузочная эстакада может быть установлена симметрично на одно.м, двух или более понтонах.
В зависимости от выполненных на линии грузовых операций, условий и места размещения устройства, участвующие в перегрузке транспортные средства (наземные и водные) могут располагаться вдоль боковых стенок камер с внешней стороны или между камерами. Функцию направляющих понтона могут выполнять стенки причала у которого установлено устройство.
По второму варианту выполнения устройства последнее снабжено вертикальными направляющими 1, установленными на дне водоема, в которых расположены опоры эстакады, каждая из которых смонтирована на балластируемом понтоне 8, который обеспечивает плавучесть устройства при его вертикальных перемещениях, а указанные направляющие, исключают перемещение плавучей части устройства в горизонтальной плоскости.
В зависимости от вида выполняемых на линии грузовых операций, условий и места размещений перегрузочного устройства, участвующие в перегрузке транспортные средства (наземные и водные) могут располагаться вдоль боковых стенок понтонов с внещней стороны или между ними. Грузоподъемность устройства зависит от веса одновременно перегружаемой партии грузовых емкостей и определяется с учетом веса плавучей части устройства. Устройство обеспечивает одновременный захват партии грузовых емкостей, размещенных вдоль оси судна в одном ярусе.
По третьему варианту выполнения устройства одна из сторон эстакады щарнирно закреплена на опоре 9 установленной на береговой черте, а другая сторона эстакады жестко закреплена на опоре 10, которая смонтирована на балластируемом понтоне 11.
Конструкция эстакады и ее опор обеспечивает беспрепятственное перемещение грузозахватных органов с грузовыми емкостями с одной стороны эстакады к противоположной перпендикулярно продольной оси понтона (понтонов).
Устройство, снабженное береговой опорой, может быть использовано также для подъема на береговую черту плавающих грузов, например, лихтерных грузовых емкостей, для чего щарнир береговой опоры устанавливается в уровень с береговой чертой.
Устройство используется для различных видов перегрузки - «судно-судно и «судно-берег.
Устройство по первому варианту работает следующим образом.
При перегрузке судно 12 (фиг. 2) с грузовыми емкостями 13 устанавливается под эстакаду 3 и фиксируется. Одновременно откачивается вода из камер 5. Понтоны 6 с перегрузочной эстакадой 3 опускаются вниз до осуществления захвата грузовых емкостей 13 грузозахватными органами 4, смонтированными на грузовых тележках (фиг. 3). После захвата партии грузовых емкостей, установленной вдоль оси судна, осуществляется одновременное наполнение камер водой с помощью насосов или самотеком. Понтоны 6 с эстакадой 3 поднимаются вверх и освобождают судно 12 от грузовых емкостей 13. После подъема понтонов
0 с эстакадой до уровня, обеспечивающего перемещение грузозахватных органов с грузовыми емкостями над бортом судна, последние перемещаются по горизонтальным направляющим в зону транспортного средс ства 14. принимающего грузовые емкости (фиг. 4). После установки грузозахватных органов над транспортным средством 14 вода из камер откачивается, и понтоны, опускаясь с эстакадой, опускают одновременно всю партию грузовых емкостей 13 на
0 транспортное средство 14. После установки грузовых емкостей на транспортное средство откачка воды прекращается и производится отцепка грузозахватны.х органов от грузовых емкостей. После отцепки
5 грузозахватные органы перемещаются в зону захвата очередной партии грузовых е.мкостей, одновременно откачивается вода из камер, и понтоны с эстакадой опускаются к судну 12. Цикл повторяется.
Погрузка производится в обратном по0 рядке.
Устройство может работать в автоматическом режиме.
Устройство по второму варианту работает следующим образом.
Судно 12 (фиг. 1) с грузовыми емкостями 13 устанавливается под эстакаду 3 и фиксируется. Балластные емкости понтонов 8 одновременно заполняются водой, и понтоны с эстакадой 3, несущей грузозахватные органы 4, опускаются вертикально
0 вниз до осуществления захвата грузовых емкостей 13 грузозахватными органами После захвата грузовых емкостей производится удаление воды из балластных емкостей понтонов и они, всплывая, освобождают судно от грузовых емкостей. После подъема понтонов до уровня, обеспечивающего беспрепятственное перемещение грузозахватных органов с грузовыми е.мкостями над бортом судна, последние на тележках с помощью приводных механизмов перемещаются по горизонтальным направляющим в зону судна 14, принимающего грузовые емкости. После установки грузовых емкостей над судном 14 балластные емкости понтонов заполняются водой и они, опускаясь, опускают грузовые емкости на
5 судно 14. После отцепки грузовых емкостей грузозахватные органы на тележках перемещаются к разгружаемому судну, и цикл повторяется.
Аналогично осуществляется работа устройства по третьему варианту с береговой опорой (фиг. 2).
Работа устройств может осуществляться в автоматическом режиме.
Применение предложенного устройства обеспечивает повышение эффективности
Фиг. г
и удобства перегрузочны.х операций в стационарных условия.х, что сократит простои судов и увеличит грузооборот перегрузочного пункта. Универсальность устройств исключает необходимость изготовления и применения узкоспециализированных известных перегрузочных устройств.
Фиг.it
,:
фиг. б
Фиг. 5
W fit j
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| РАЗГРУЗЧИК СЫПУЧИХ МАТЕРИАЛОВ ИЗ СУДОВ | 0 |
|
SU363645A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
