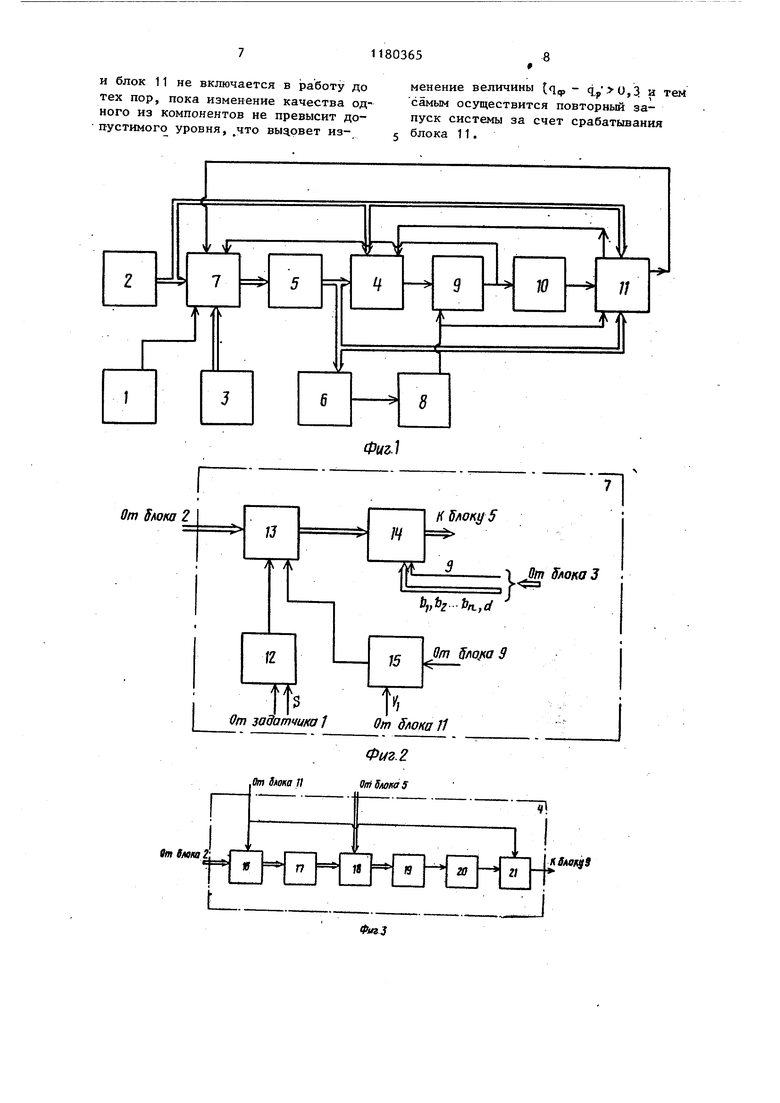
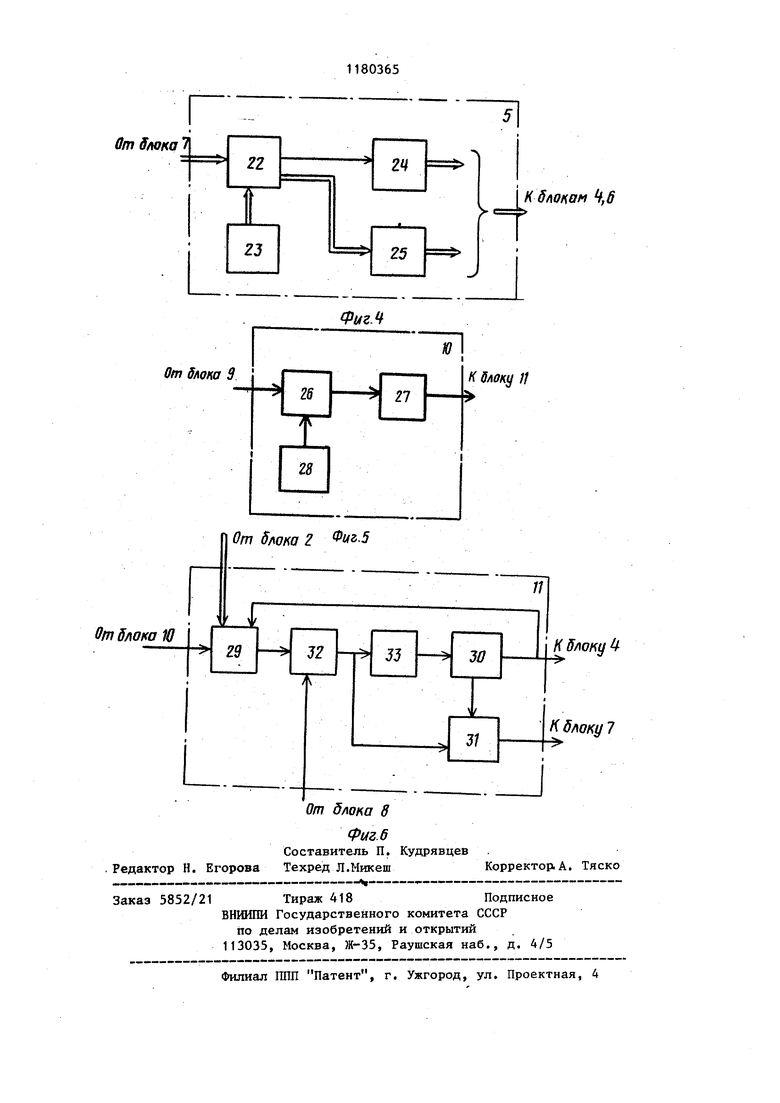
1.1 Изобретение относится к области, автоматического управления технологическими процессами и может быть использовано, в частности, для управления процессами приготовления pa личных видов продуктов (топлива, масел и др.) путем смешения нескольких компонентов. Целью изобретения яв1ляется повыше ние быстродействия и точности функ.ционирования системы. На фиг. 1 представлена блок-схема предлагаемой системы; на фиг.2 - бло схема блока построения модели; на фиг.З - блок-схема вьиислителя параметра качества смеси; на фиг.А блок-схема формирователя рецептуры смеск; на фиг.З - блок-схема формирователя управляющего воздействия; на фиг.6 - блок-схема блока корректи ровки модели качества. Система управления поиском оптимальной рецептуры содержит задатчик качества-смеси 1, блок 2 измерителей параметров компонентов, блок 3 ввода исходных данньк, вычислитель 4 параметра качества смеси, формирователь 5 рецептуры смеси, объект 6 управления, блок 7 построения модели, измеритель 8 параметра качества смеси, блок 9 сравнения, формирователь, 10 управляющего воздействия, блок 11 корректировки модели качества смеси. Блок 7 построения модели содержит ячейку 12 пам/сти., блок 13 вычисле- . ния разности ,блок 14памяти иключ 15. ВЙчислитель 4 параметра качества смеси выполнен (например, для процес са смешения масел) в йиде Последовательно соединенных первого сумматора 16, блока 17 логарифмирования, блока 18 вычисления степени числа, блока :19 перемножения,- блока 20 вычисления степени числа и второго сумматор 21. Формирователь 5 рецептуры смеси состоит из вычислителя 22, блока 23 вспомогательных параметров, блока 24 задержки и блока 25 памяти. Вычислитель 22 представляет собой известный специализированный вычислитель, предназначенный для решения общей задачи линейного программирования с помощью итеративного алгоритма. При этом в вычислителе решается пара двойственных задач линейного программирования: 5 Ах - у i b рА + q с X V . Р г p(c,4l-(2,4l- atu:C(J(p,bVlc,5) Х, р,(о В блоке 23 хранятся значения вспомогательных параметров, которые определяют точность работы алгоритма и число итераций. В блоке 25 памяти хранятся значения искомого вектора решения х. Одновременно с окончанием решения вычислитель 22 формирует управляющий сигнал V о том, что процесс вычислений закончился. Формирователь 10 управляющего воздействия содержит блок 26 сравнения, блок 27 формирования импульса и блок 28 уставки. Блок 11 корректировки модели смери содержит второй вычислитель 29 параметра качества модели (аналогичното вычислителю 4), шаговый экстремальный регулятор 30, блок 31 останова, сумматор 32 и блок 33 вычисления критерия оптимизации В качестве шагового экстремального регулятора 30 может использоваться серийно выпускаемый регулятор 1А01-1. В качестве блока 31 останова процесса поиска экстремума может использоваться известный блок останова от экспериментального многоканального .экстремального регулятора ОС-10 при задействовании одного его канала. Блок 33 представляет собой по сути квадратор. В предлагаемой системе реализуется решение следующей задачи. Требуется найти оптимальную рецептуру X (х., ,Х2,... ,Xj,) смеси при ограничениях на запасы компонентов и на выпуск товарной продукции. То есть требуется решить следующую задачу:х; 6 Ь.21 X & 1,2,...,п .21 (q - q)x; О .z: (ц - срхX - искомое количество 1-го компонента- в смеси; Ь - запас i-ro компонента; d - задание на выпуск продукта (смеси); q - фактическое качество 1 -го компонента; q - требуемое по ГОСТу качество товарного продукта; при этом допускается некоторый разброс; q 6 q -С.; , ц - цена единицы смеси; С - себестоимость i-гб компонен та. Следует при этом учитывать, что в процессе получения продукта (смеси параметры qjj могут меняться. Кроме того, априори модель зависимости качества смеси q 5(,Х;,,..,х) .i также точно неизвестна. Все это приводит к необходимости организации процесса корректировки рецептуры сме си в условиях неопределенности, что представляет собой сложную задачу адаптивного управления. Предлагаемая система работает сле дующим образом. Предварительно на наборном поле блока 3 ввода исходных данных набираются параметры ,...,b«,d и (ц-cj-),... (ц-с„) . Параметры (ц - ср предварительно вычисляются. Одновре менно в задатчик 1 качества смеси вводится значение параметра q.Параметр допустимого разброса в виде заданной уставки вводится в блок 28 уставок. После ввода параметров по команде оператора данные с блока 3 (сигнал S) переписываются в блок 14 памяти и с задатчика 1 качества смеси-в ячейку 12 памяти блока 7. В блоке 7 данные с ячейки памяти сч тываются, сравниваются с сигналом на выходе блока 2 н на. выходе блока 13 разности образуется векторный си нал (-q.,), (q-qj,)) который запоминается в блоке 14 памяти. После окончания процесса записи выход блока 14 памяти подается н вычислитель 22, которьш использует данные с блока 23 вспомогательных параметров. Блок 23 может, быть выполнен в виде стандартного блока ПЗУ В вычислителе 22 определяется, испол зуя итеративный алгоритм, с заданной точностью оптимальная рецептура смеси х (х,,,х, ...,х для существующих значений параметров качества 365 . 4 компонентов q. ,q,.. ,,qj. и параметра качества смеси q. Рецептура- смеси о запоминается в блоке 25 памяти. Одновременно на выходе блока 24 задержки, учитьшающего запаздывание в работе исполнительных органов объекта управления, формируется управляющий сигнал. Выходной сигнал с блока 5 поступает на объект 6 управления, где начинается формирование смеси в соответствии с оптимальной рецептурой х (,x..., ... K.J С учетом запаздывания на выходе вычислителя 4 формируется сигнал q, характеризующий расчетное значение качества смеси. Например, может использоваться следующая модель, характеризующая вязкость смеси масел: .,„Дt«(,ИrД где К - априори заданный коэффициент,, который в процессе работы можно корректировать. В блоке 9 происходит сравнение фактического качества смеси , получаемого на выходе измерителя 8 параметра качества смеси (например, вискозиметра в потоке с цифровым выходом), с расчетным значением qp. При этом, если (qp-qф)s то на выходе блока 10 формируется управляющий импульс, которьй запускает в работу блок 11. В блоке 11 осуществляется с помощью экстремального регулятора 30 нахождение параметра К таким образом, чтобы (ЧрТ л,В заданный порог точности. Таким образом осуществляется параметрическая подгонка математической модели к адекватной. После нахождения оптимального значения К на выходе блока 31 формируется управляющий сигнал и, по которому в блоке 7 происходит корректировка исходной модели оптимизации, т.е. в блоке 13 вычисляется следующий векторный сигнал (q+Aq-q), (q + fi. q-q)(q + Aq-q) ,который запоминается в блоке 14 памяти. Одновременно уточняются параметры модели в блоке 4. После этого цикл формирования управляющего воздействия повторяется. Рассмотрим конкретный пример прк менения системы управления поиском оптимальной рецептуры смеси.
511803656
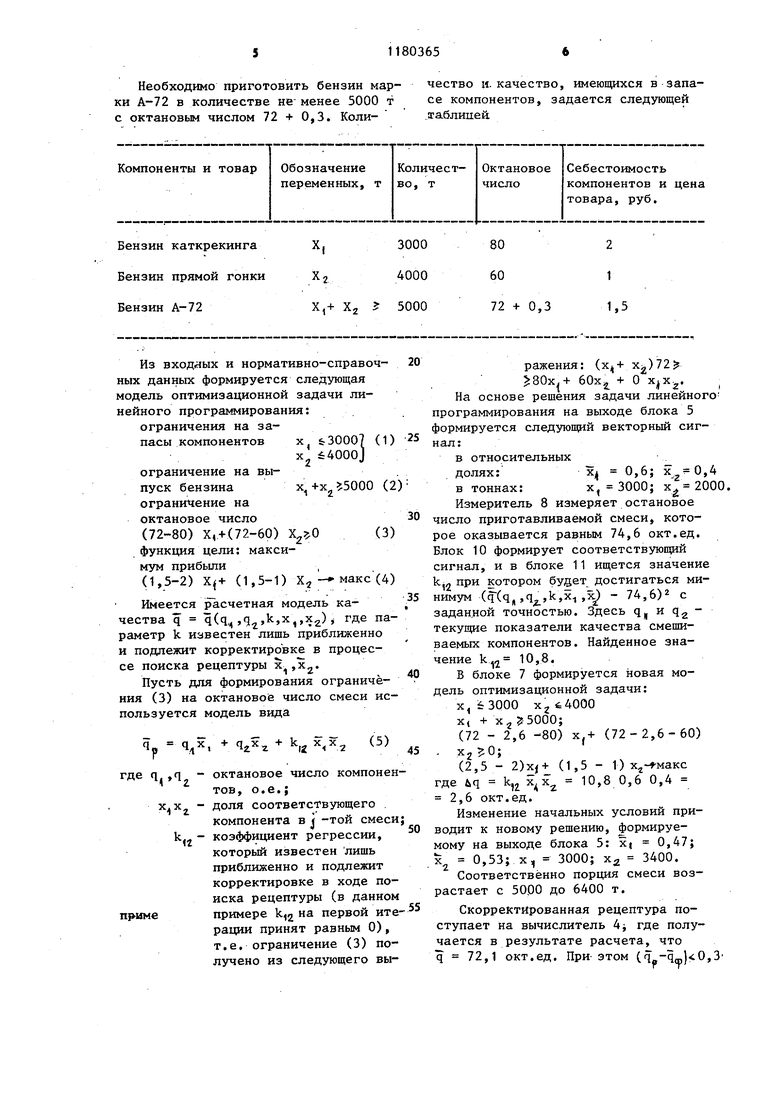
Необходимо приготовить бензин мар честно и. качество, имеющихся в запаки А-72 в количестве не-менее 5000 т се компонентов, задается следующей с октановым числом 72 + 0,3. Коли- таблицей
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления поиском оптималь-НОй РЕцЕпТуРы СМЕСЕй | 1979 |
|
SU824136A1 |
| Устройство для составления смеси заданного состава | 1983 |
|
SU1196819A1 |
| Система автоматической оптимизации | 1986 |
|
SU1310773A1 |
| Система автоматического управления технологическими параметрами | 1976 |
|
SU723500A1 |
| Система адаптивного управления процессом гранулирования комбикормов | 1987 |
|
SU1531956A1 |
| Устройство для автоматического регулирования толщины полосы на прокатном стане | 1990 |
|
SU1729643A1 |
| Система управления | 1984 |
|
SU1173388A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКОЙ ХАРАКТЕРИСТИКОЙ ВЫХОДНОГО ПАРАМЕТРА | 2005 |
|
RU2292575C2 |
| МОДЕЛИРУЮЩИЙ КОМПЛЕКС ДЛЯ ПРОВЕРКИ СИСТЕМЫ УПРАВЛЕНИЯ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2432592C1 |
| Адаптивный измеритель параметров сигнала | 1981 |
|
SU970251A1 |
СИСТЕМА УПРАВЛЕНИЯ ПОИСКОМ ОПТИМАЛЬНОЙ РЕЦЕПТУРЫ СМЕСЕЙ, содержащая задатчик качества смеси, блок измерителей параметров компонентов, блок ввода исходных данных, вычислитель параметров качества смеси и формирователь рецептуры смеси, выходом подключенный к входу объекта управления, отличающаяся тем, что, с целью повьшения быстродействия и точности функционирования системы, в нее введен блок построения модели, последовательно соединенные измеритель параметра качества смеси, блок сравнения, формирователь 1,1 2 управляющего воздействия и блок корректировки модели качества смеси, причем первый вход блока построения модели соединен с выходом блока измерителей параметров компонентов, первым входом вычислителя параметра качества смеси и вторым входом блока корректировки модели качества смеси, третий и четвертый входы которого соединены соответственно с выходом измерителя параметров качества смеси и выходом формирователя рецептуры смеси, второй вход блока построения модели соединен с выходом блока ввода исходных данных, а выход через фор€ мирователь рецептуры смеси соединен (Л с вторым входом вычислителя параметров качества смеси, подключенного выходом к второму входу блока сравнения, третий вход блока построения модели соединен с выходом блока сравнения, третий вход вычислителя параметров качества смеси подключен к первому выходу блока корректировки модели качества смеси, второй выход 00 которого соединен с четвертым входом о со 0) сд блока построения модели, выход объекта управления подключен к входу измерителя параметров качества смеси, а задатчик качества смеси соединен с пятым входом блока построения модели.
Из входных и нормативно-справочных данных формируется следующая модель оптимизационной задачи линейного програгф1ирования: ограничения на запасы компонентов х б-ЗООО (1 х 64000J ограничение на выпуск бензина 5000 (2 ограничение на октановое число (72-80) Х,+(72-60) Х250 функция цели: максимум прибыли, (1,5-2) (1,5-1) Xj - макс (4) Имеется расчетная модель качества q q(q,, ,q,.,,k,x,,X2,) j где параметр k известен лишь приближенно и подлежит корректировке в процессе поиска рецептуры х.,Х2. Пусть для формирования ограничения (3) на oKTaHOBoie число смеси используется модель вида где q.,q - октановое число компонен тов , о. е.; X,X - доля соответствующего . компонента в j -той смеси kj - коэффициент регрессии, который известен лишь приближенно и подлежит корректировке в ходе поиска рецептуры (в данном примере k,2 на первой ите рации принят равным 0), т.е. ограничение (3) получено из следующего выражения: ( х.У72 ВОх, + бОх + О . На основе решения задачи линейногопрограммирования на выходе блока 5 формируется следуюпщй векторный сигнал:в относительных долях:Xjj 0,6; X 0,4 в тоннах:х, 3000; . Измеритель 8 измеряет остановое число приготавливаемой смеси, которое оказывается равным 74,6 окт.ед. Блок 10 формирует соответствующий сигнал, и в блоке 11 ищется значение k.-при котором будет достигаться ми12нимум ((r(q|,,q,k,x ,5 - 74,6) с заданной точностью. Здесь q к q текущие показатели качества смешиваемых компонентов. Найденное значение k 10,8. В блоке 7 формируется новая модель оптимизационной задачи: X, 3000 Х2 4000 Х( + Xj 5000; (72 - 2,6 -80) х,+ (72-2,6-60) - (2,5 - 2)х(+ (1,5 - 1) где &q k, х х. 10,8 0,6 0,4 2,6 окт.ед. Изменение начальных условий приводит к новому решению, формируемому на выходе блока 5: Х| 0,47; х 0,53; X, 3000; Хд 3400. Соответственно порция смеси возрастает с 5000 до 6400 т. Скорректированная рецептура поступает на вычислитель 4i где получается в результате расчета, что 72,1 окт.ед. При-этом (q.,-qa,)0,3
и блок 11 не включается в работу до тех пор, пока изменение качества одного из компонентов не превысит допустимого уровня, что вьщовет изменение величины {q - ,3 и тег самым осуществится повторньй запуск системы за счет срабатывания 5 блока 11.
От SKOKO 2
ТТз
0т задатчит /
Л
От УмкаЗ
Т
От 5лока11
Фиг. 2
7
От ff/юка
22
Z3
Фиг.Ч
От длока 3
2S
2Ц
i
блокам ,6
25
К SAOKI/ //
27
| Система управления поиском оптималь-НОй РЕцЕпТуРы СМЕСЕй | 1979 |
|
SU824136A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Итеративные методы в теории при программировании | |||
| М | |||
| , 1974, с, 170-181, рис | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Растригин Л.А | |||
| Системы экстремального управления | |||
| М.: Наука, 1974, с | |||
| Автоматический указатель станций | 1914 |
|
SU582A1 |
| КОНТРОЛЬНЫЙ СИГНАЛЬНЫЙ ПРИБОР | 1921 |
|
SU594A1 |
