/г
Фиэ.4
114
Изобретение относится к машиностроению и может быть использовано как зажимное устройство в роботах-манипуляторах.
Целью изобретения является расам- рение технологических возможностей.
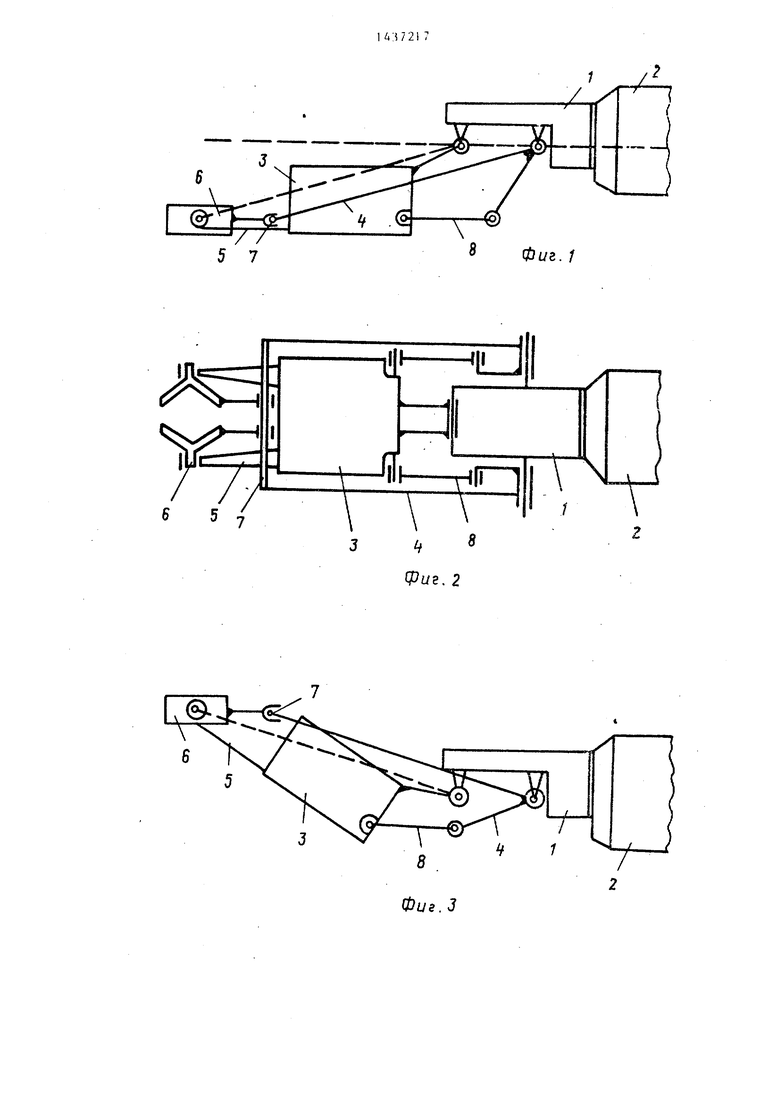
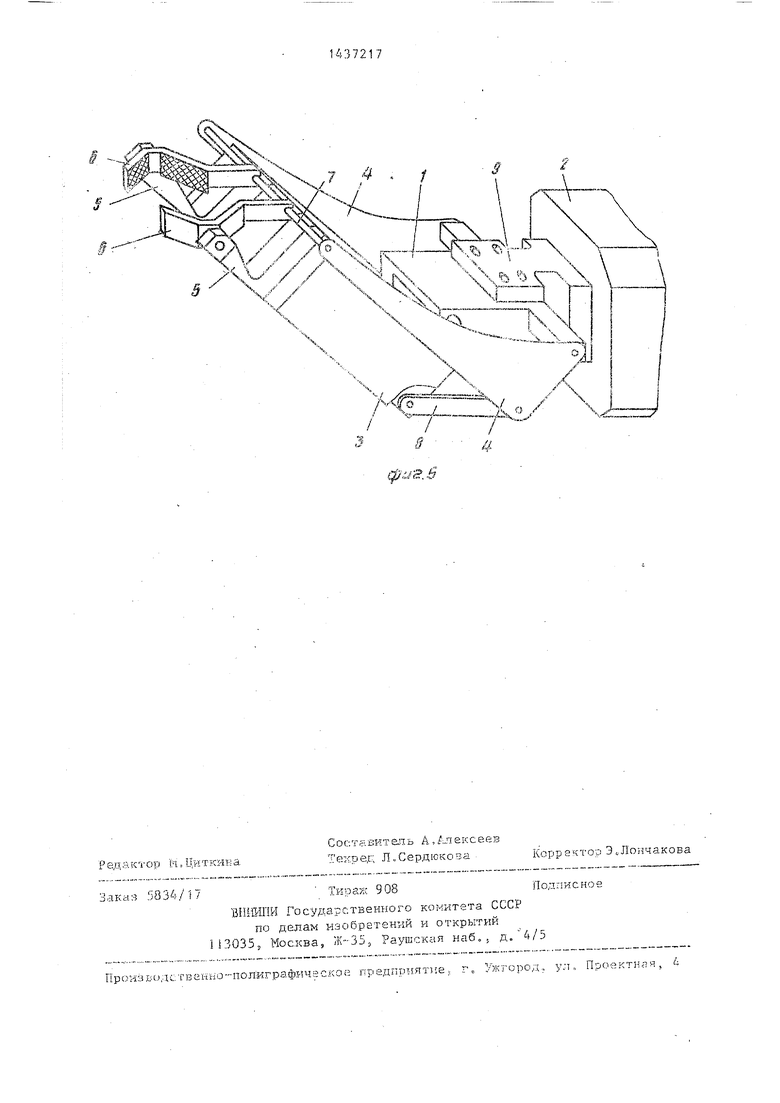
На фиг. 1 показано предлагаемое устройство, исходное положение; на фиг. 2 - то же, вид в, плане (стрелками показано движение зажимных губок при зажиме или разжиме детали); на фиг,- 3 - перемещение детали после подъема захватного механизма; на фиг. 4 - кисть в исходном положении, общий вид; на фиг. 5 - то же, после подъема захватного механизма.
Кисть манипулятора состоит из корпуса 1, жестко закрепленного на ПОБО ротном устройстве 2 руки робота, на котором шарнирно закреплен захватньм механизм 3, звеньев - рычагов 4 основного шарнирно-параллелограммного . механизма. Захватный механизм 3 имеет выходные звенья 5 привода, связан- ные с зажимными губками 6. Зажимные губки 6 могут свободно перемещаться по направляющей 7 во время их сжатия или разжатия. Направляющая 7 и тяга 8 закреплены в рычагах 4. Другим кон- дом тяга 8 шарнирно закреплена с зажимным устройством и образует тем самым дополнительный шарнирно-паралле- лограммный механизм. Корпус 1 соединен с поворотным механизмом через предохранитепьный кронштейн 9. Зах- ватный механизм состоит из пневмоци- линдра 10, жестко связанного с одним из выходных звеньев 5 и с гибкой тягой 11, которая, проходя через ролики
12, жестко связана с другим выходным звеном 5. Тем самым обеспечивается встречное сведение или разведение зажимных губок при подаче воздуха в пневмоидлиндр 10. В корпусе 1 шарнирно закреплен пневмоцилиндр 13.
Устройство работает следующим образом.
.. с
Q 5 -
0
5
При подаче воздуха в пневмоцилиндр 13 захватный механизм 3 поворачивается вокруг оси 14 на некоторый угол. Через тяги 8 зажимное устройство поворачивает на такой же угол рычаги 4 с направляющей 7, на которой также закреплены зажимные губки 6. Таким образом осуществляется параллельное перемещение зажимных губок как одной из сторон шарнирно-параллелограммного механизма относительно зажимных элементов.
Формула изобретения
Кисть манипулятора, содержащая корпус, установленный на нем основной шарнирно-параллепограммньш механизм, одно из звеньев которого закреплено на корпусе, а на звене, параллельном . ему, установлен захватный механизм, отличающаяся тем, что, с целью расширения технологических возможностей, она снабжена дополнитель- ньм шарнирно-параллелограммным механизмом, имеющим общее звено, закрепленное на корпусе со звеном основного шарнирно-параллелограммного механизма, причем на одном из смежных с этим звеном звене основного шарнирно- параллелограммного механизма установлен привод захватного механизма, зажимные губки которого установлены с возможностью перемещения вдоль осей шарниров, связывающих звенья основного шарнирно-параллелограммного механизма, и являются звеньями этого механизма, параллельными звену, закрепленному на корпусе, кроме того, звено дополнительного шарнирно-параллелограммного механизма, параллельное звену, установленному на корпусе, шарнирно связано с корпусом привода захватного механизма и с двуплечим рычагом, плечи которого являются звеньями основного и дополнительного шарнирно- параллелограммных механизмов.
Фиг. f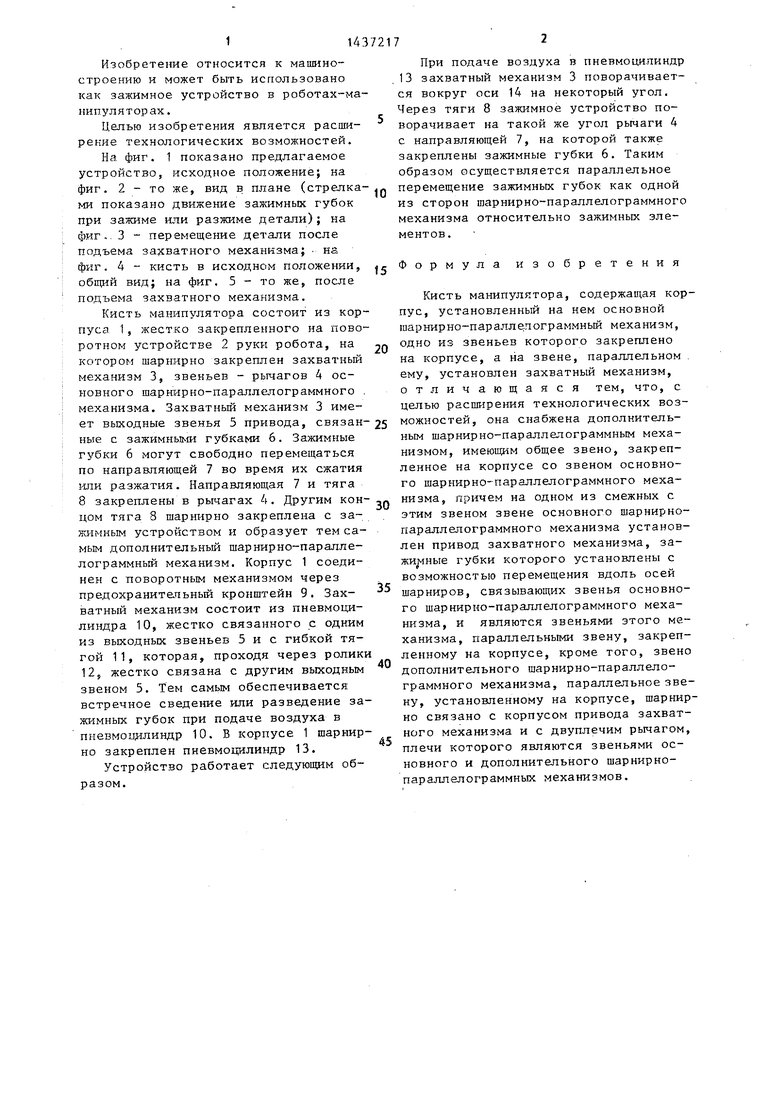
| название | год | авторы | номер документа |
|---|---|---|---|
| Кисть манипулятора | 1987 |
|
SU1421532A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022777C1 |
| Захватное устройство | 1987 |
|
SU1473944A1 |
| Захватное устройство | 1985 |
|
SU1268405A1 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Захват промышленного робота | 1979 |
|
SU841962A1 |
| Схват манипулятора | 1986 |
|
SU1342730A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Захватное устройство | 1985 |
|
SU1283092A1 |
| Захватное устройство | 1985 |
|
SU1283098A1 |
Изобретение относится к области машиностроения и может быть использовано как зажимное устройство в роботах-манипуляторах. Целью изобретения является расширение технологических возможностей. Зажимные губки б перемещаются при подаче воздуха в силовой цилиндр 10. В корпусе 1 шарнир- но закреплен силовой цилиндр 13, при подаче воздуха в который захватный механизм 3 поворачивается вокруг оси 14 на некоторый угол. На такой же угол поворачиваются рычаги 4 с направляющей 7, на которой закреплены зажимные губки 6. Таким образом осущег ствляется параллельное перемещение зажимных губок как одной из шарнирных сторон параллелограммного механизма относительно зажимных элементов. 5 ил.
6 5
il llJ
Я
3li
/.
Фие. 2
.л-
-/ ,.т,:::д.
/v --X/ /
/V-,
8
(4/; 5
| Манипулятор | 1980 |
|
SU869931A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
