(21)4103265/40-1 I
(22)05.08.86
(46) 15.02.88. Бюп. № 6 (72) Ю.И.Панов
(53)621„869 (088.8)
(56)Авторское свидетельство СССР № 1184792, кл. В 66 С 1/48, 02.04„84.
(54)АВТОМАТИЧЕСКОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО
(57)Изобретение относится к области подъемно-транспортного машиностроения. Цель изобретения - повышение удобства в эксплуатации. Устройство содержит раму с направляилдей, имеющей рельефную поверхность 5, контактирующую со звеньями втулочно-ролико- вой цепи, закрепленной на подъемно- опускном органе 8о При выдвижении ползуна с захватным органом до упора в груз клиновыми захватными элементами 3 звенья втулочно-роликовой цепи разворачиваются до упора в рельефную поверхность 5 и фиксируют ее в направляющей. 1 ил.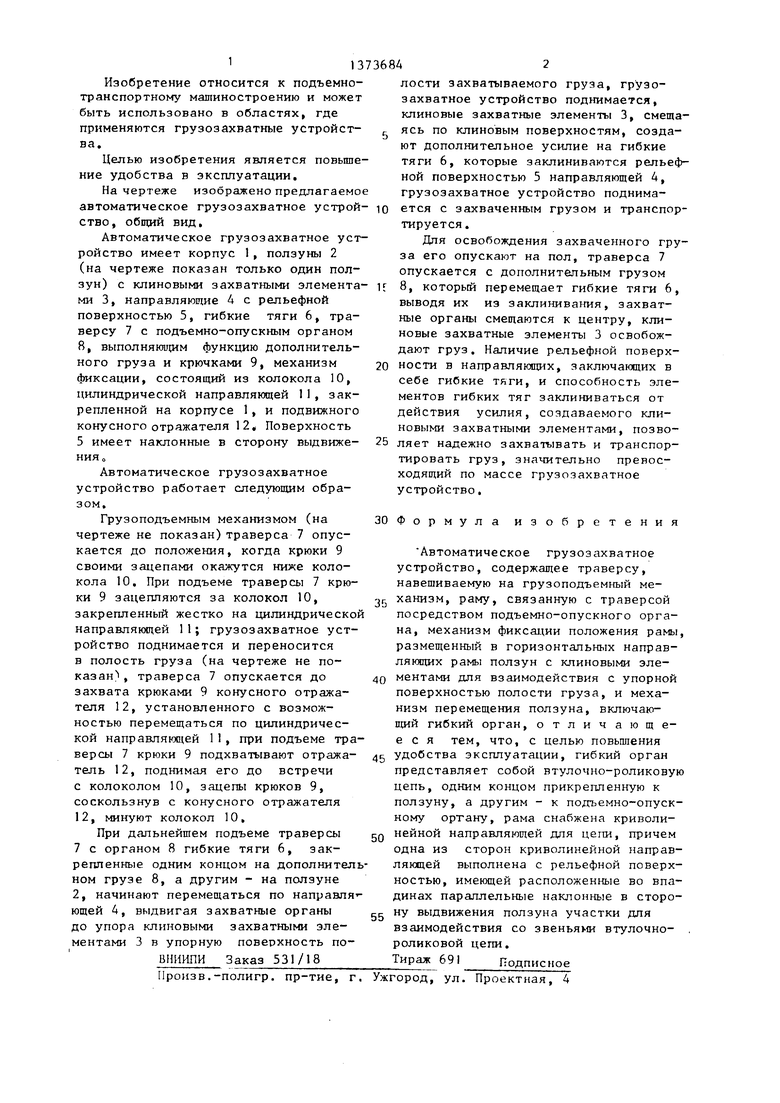
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1987 |
|
SU1458308A1 |
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| Грузозахватное устройство | 1988 |
|
SU1691264A2 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватная система | 1989 |
|
SU1768491A1 |
| Грузозахватное устройство | 1987 |
|
SU1477649A1 |
| Грузозахватное устройство | 1978 |
|
SU747803A1 |
| ТРАВЕРСА, МЕХАНИЗМ ВЫРАВНИВАНИЯ БАЛАНСИРОВКИ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ТАКЕЛАЖНОЕ УСТРОЙСТВО НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ГРУЗОФИКСИРУЮЩЕЕ СРЕДСТВО ТАКЕЛАЖНОГО УСТРОЙСТВА НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, ОПОРНЫЙ СТАПЕЛЬ НЕСУЩЕЙ БАЛКИ ТРАВЕРСЫ, СПОСОБ РАВНОВЕСНОЙ НАСТРОЙКИ ТРАВЕРСЫ НА ОПОРНЫХ СТАПЕЛЯХ, СПОСОБ ПЕРЕМЕЩЕНИЯ ТРАВЕРСОЙ ИЗДЕЛИЯ | 2008 |
|
RU2376237C1 |
| Захватный орган кантователя | 1985 |
|
SU1284935A1 |
| Захват-раскладчик для штучных грузов | 1977 |
|
SU789369A1 |

(/
оо
ОЭ 05 00
.
Изобретение относится к подъемно- транспортному машиностроению и может быть использовано в областях, где применяются грузозахватные устройства.
Целью изобретения является повышение удобства в эксплуатации.
На чертеже изображено предлагаемое
автоматическое грузозахватное устрой- ю ется с захваченным грузом и транспор- ство, общий вид.
Автоматическое грузозахватное устройство имеет корпус 1, ползуны 2 (на чертеже показан только один ползун) с клиновыми захватными элементами 3, направляющие 4 с рельефной поверхностью 5, гибкие тяги 6, траверсу 7 с подъемно-опускным органом 8, выполняюио м функдию дополнительного груза и крючками 9, механизм фиксации, состоящий из колокола 10, цилиндрической направляющей 11, закрепленной на корпусе 1, и подвижного конусного отражателя 12, Поверхность 5 имеет наклонные в сторону выдвижения
Автоматическое грузозахватное устройство работает следующим образом.
Грузоподъемным механизмом (на чертеже не показан)траверса 7 опускается до положения, когда крюки 9 своими зацепами окажутся ниже колокола 10. При подъеме траверсы 7 крюки 9 эацеппяются за колокол 10, закрепленный жестко на цилиндрической направляющей 11; грузозахватное устройство поднимается и переносится в полость груза (на чертеже не показан , траверса 7 опускается до захвата крюками 9 конусного отражателя 12, установленного с возможностью перемещаться по цилиндрической направляющей 11, при подъеме траверсы 7 крюки 9 подхватывают отражатель 12, поднимая его до встречи с колоколом 10, зацепы крюков 9, соскользнув с конусного отражателя 12, минуют колокол 10.
При дальнейшем подъеме траверсы 7 с органом 8 гибкие тяги 6, закрепленные одним концом на дополнительном грузе 8, а другим - на ползуне 2, начинают перемещаться по направля-- ющей 4, выдвигая захватные органы до упора клиновыми захватными элементами 3 в упорную поверхность по- ВМНШИ Заказ 531/18
тируется.
Для освобождения захваченного груза его опускают на пол, траверса 7 опускается с дополнительным грузом
И 8, который перемещает гибкие тяги 6, выводя их из заклинивания, захватные органы смещаются к центру, клиновые захватные элементы 3 освобождают груз. Наличие рельефной поверх20 ности в направляющих, заключающих в себе гибкие тяги, и способность элементов гибких тяг заклиниваться от действия усилия, создаваемого клиновыми захватными элементами, позво25 ляет надежно захватывать и транспортировать груз, значительно превосходящий по массе грузозахватное устройство,
30 Формула изобретения
Автоматическое грузозахватное устройство, содержащее траверсу, навешиваемую на грузоподъемный ме-jg ханизм, раму, связанную с траверсой посредством подъемно-опускного органа, механизм фиксации положения рамы, размещенный в горизонтальных направляющих рамы ползун с клиновыми эле40 ментами для взаимодействия с упорной поверхностью полости груза, и механизм перемещения ползуна, включающий гибкий орган, отличающееся тем, что, с целью повышения
45 удобства эксплуатации, гибкий орган представляет собой втулочно-роликовую цепь, одним концом прикрепленную к ползуну, а другим - к подъемно-опускному органу, рама снабжена криволинейной направляющей для цепи, причем одна из сторон криволинейной направляющей выполнена с рельефной поверхностью, имеющей расположенные во впадинах параллельные наклонные в сторону выдвижения ползуна участки для взаимодействия со звеньями втулочно- роликовой цепи. Тираж 691Подписное
50
55
лости захватываемого груза, грузозахватное устройство поднимается, клиновые захватные элементы 3, смещаясь по клиновым поверхностям, создают дополнительное усилие на гибкие тяги 6, которые заклиниваются рельефной поверхностью 5 направляющей 4, грузозахватное устройство поднимается с захваченным грузом и транспор-
тируется.
Для освобождения захваченного груза его опускают на пол, траверса 7 опускается с дополнительным грузом
8, который перемещает гибкие тяги 6, выводя их из заклинивания, захватные органы смещаются к центру, клиновые захватные элементы 3 освобождают груз. Наличие рельефной поверхности в направляющих, заключающих в себе гибкие тяги, и способность элементов гибких тяг заклиниваться от действия усилия, создаваемого клиновыми захватными элементами, позволяет надежно захватывать и транспортировать груз, значительно превосходящий по массе грузозахватное устройство,
Формула изобретения
Автоматическое грузозахватное устройство, содержащее траверсу, навешиваемую на грузоподъемный механизм, раму, связанную с траверсой посредством подъемно-опускного органа, механизм фиксации положения рамы, размещенный в горизонтальных направляющих рамы ползун с клиновыми элементами для взаимодействия с упорной поверхностью полости груза, и механизм перемещения ползуна, включающий гибкий орган, отличающееся тем, что, с целью повышения
удобства эксплуатации, гибкий орган представляет собой втулочно-роликовую цепь, одним концом прикрепленную к ползуну, а другим - к подъемно-опускному органу, рама снабжена криволинейной направляющей для цепи, причем одна из сторон криволинейной направляющей выполнена с рельефной поверхностью, имеющей расположенные во впадинах параллельные наклонные в сторону выдвижения ползуна участки для взаимодействия со звеньями втулочно- , роликовой цепи. Тираж 691Подписное
