(54) АВТОМАТИЧЕСКОЕ ЗАХВАТНОЕ УСТРОЙСТВО
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое грузозахватное устройство | 1984 |
|
SU1184792A1 |
| Грузозахватное устройство | 1990 |
|
SU1773847A1 |
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Устройство для захвата груза на поддоне | 1982 |
|
SU1121227A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1999 |
|
RU2188290C2 |
| Захватное устройство для труб | 1982 |
|
SU1065326A1 |
| Захватное устройство для труб | 1982 |
|
SU1178680A1 |
| Грузозахватное устройство | 1989 |
|
SU1720986A1 |
| Грузозахватное устройство | 1990 |
|
SU1736904A1 |
| Грузозахватное устройство | 1990 |
|
SU1773846A1 |
1
Изобретение относится к подъемно-транспортному оборудованию, а именно к автоматическим захватным.
Известно автоматическое захватное устройство, содержащее навешиваемую на крюк грузоподъемного механизма траверсу и, связанную с ней стойкой и механизмом фиксации раму, с установленными на ней каретками, несущими захватный орган, каждая из которых связана посредством двух гибких тяг, перекинутых через систему блоков, с траверсой 1.
Недостатком известного устройства является недостаточная надежность работы.
Целью изобретения является повышение надежности работы.
Указанная цель достигается тем, что два блока установлены на раме, один - на конце, другой - у основания стойки, а третий блок закреплен в верхней части стойки, при этом одна из 5помянутых гибких тяг перекинута через блок у основания стойки, а даугая гибкая тяга огибает последовательно блок на конце рамы и блок в верхней части стойки.
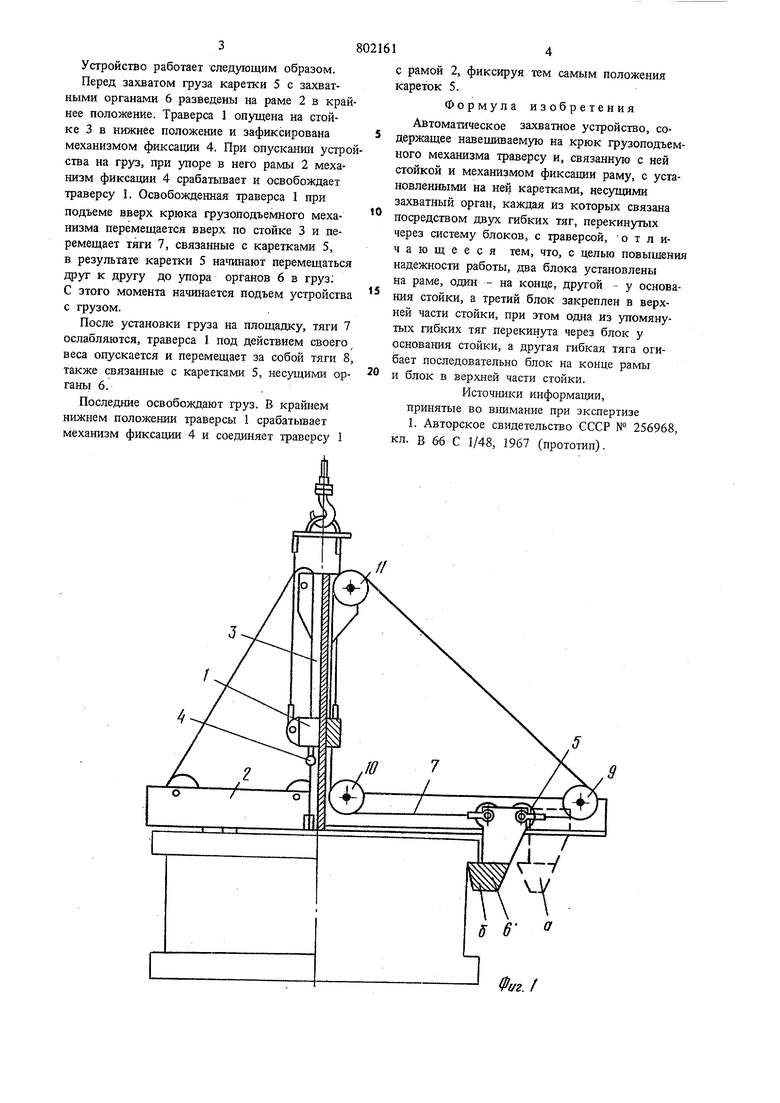
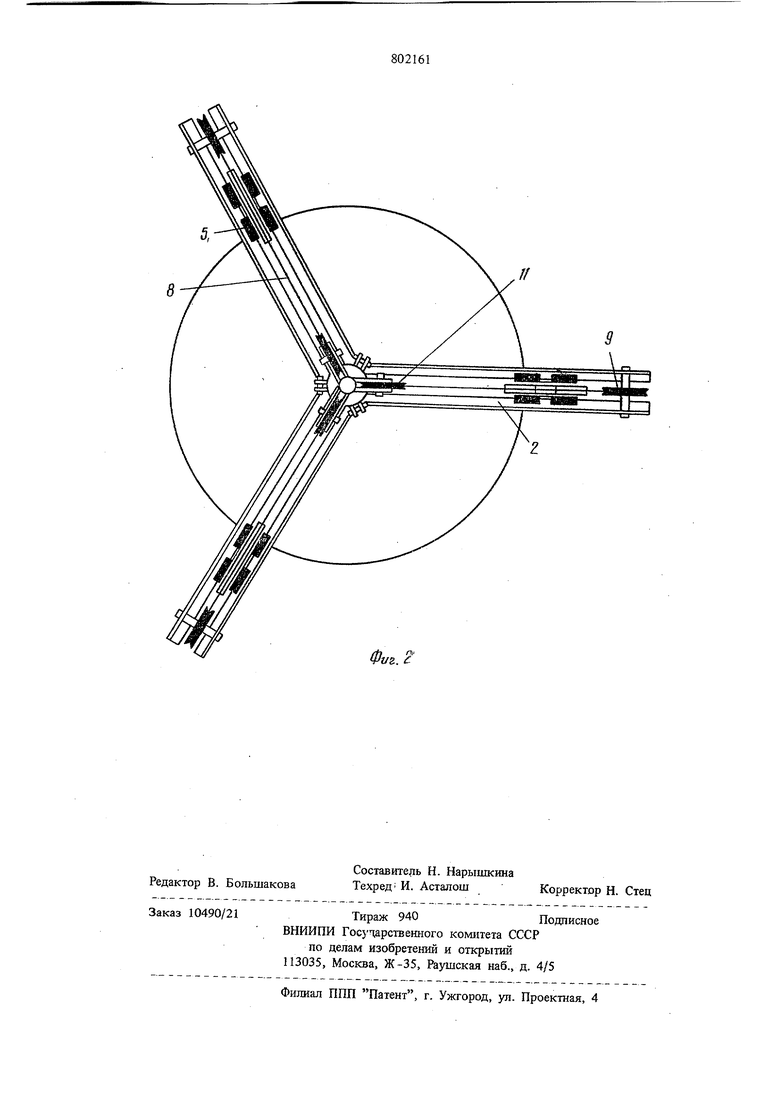
На фиг. 1 показан общий вид автоматического захватного устройства; на фиг. 2 - вид сверху на автоматическое захватное устройство.
Устройство содержит навешиваемую на крюк грузоподъемного механизма траверсу 1 и раму 2.
В центре рамы 2 жестко закреплена стойка 3, по которой перемещается траверса 1. Положение траверсы 1 относительно стойки 3 фиксируется механизмом фиксации 4. . На раме 2 установлены каретки 5, несуш 1е захватный орган 6.
Каждая из кареток 5 связана посредством двух гибких тяг 7 и 8 с траверсой 1. При зтом на раме 2 по концам закреплены блоки 9, у основания стойки 3 закреплены блоки 10, а в верхней части стойки 3 закреплены блоки И.
Тяги 7, одними концами закрепленные на каретках 5, а другим на нижней части траверсы 1, огибают блок 8. Тяги 7, также одними концами прикрепленные к кареткам 5, а другими - к верхней части траверсы 1, огибают последовательно блоки 9 и 11. Устройство работает следующим образом. Перед захватом груза каретки 5 с захватными органами 6 разведены на раме 2 в крайнее положение. Траверса 1 опущена на стойке 3 в нижнее положение и зафиксирована механизмом фиксации 4. При опускании устрой ства на груз, при упоре в него рамы 2 меха низм фиксации 4 срабатывает и освобождает траверсу 1. Освобожденная траверса 1 при подъеме вверх крюка грузоподъемного механизма перемещается вверх по стойке 3 и перемещает тяги 7, связа1юые с каретками 5, в результате каретки 5 начинают перемещаться друг к другу до упора органов 6 в груз; С зтого момента начинается подъем устройства с грузом. После установки груза на площадку, тяги 7 ослабляются, траверса 1 под действием своего, веса опускается и перемещает за собой тяги 8, также связанные с каретками 5, несущими органы 6.. Последние освобождают груз. В крайнем нижнем положении траверсы 1 срабатьюает механизм фиксации 4 и соединяет траверсу 1 8
уг./ 4 с рамой 2, фиксируя тем самым положения кареток 5. Формула изобретения Автоматическое захватное устройство, содержащее навещиваемую на крюк грузоподъемного механизма траверсу и, связанную с ней стойкой и механизмом фиксации раму, с установленными на ней каретками, несущими захватный орган, каждая из которых связана посредством яву гибких тяг, перекинутых через систему блоков, с траверсой, отличающееся тем, что, с целью повыщения надежности работы, два блока установлены на раме, один - на конце, другой - у основания стойки, а третий блок закреплен в верхней части стойки, при этом одна из упомянутых гибких тяг перекинута через блок у основания стойки, а другая гибкая тяга огибает последовательно блок на конце рамы и блок в верхней части стойки. Источники информации, принятые во В1шмание при экспертизе 1. Авторское свидетельство СССР № 256968, кл. В 66 С 1/48, 1967 (прототип).
