Изобретение относится к станкостроению, в частности к механизации . и автоматизации процессов загрузки и выгрузки деталей в металлорежущих станках.
Известен автоматический манипулятор, содержащий каретку, на которой шарнирнб установлена рука с плечевым и локтевым звеньями, и силовой цилиндр для подъема звеньев руки 1.
Недостаток известного манипулятору состоит в его ограниченных технологических возможностях, так как на автоматизированных участках с использованием указанного манипулятора обслуживаемое оборудование приходится выставлять по положению захвата руки манипулятора, т.е. положение оборудования зависит от положения руки манипулятора..
Цель изобретения - расширение технологических возможностей манипулятора при многостаночном обслуживании.
Для достижения поставленной цели автоматический манипулятор снабжен путевом механизмом управления, выполненньпл в виде установленных на каретке барабанов с упорами, кинематически связанными с рейкой, расположенной вдоль пути перемещения ,
каретки, при этом силовой цилиндр также смонтирован на каретке и снабжен соединенными с его штоком зубчато-реечными передачами, рейки которых установлены с возможностью взаимодействия с упорами барабанов, а зубчатые колеса - связаны с плечевым, и локтевым звеньями руки.
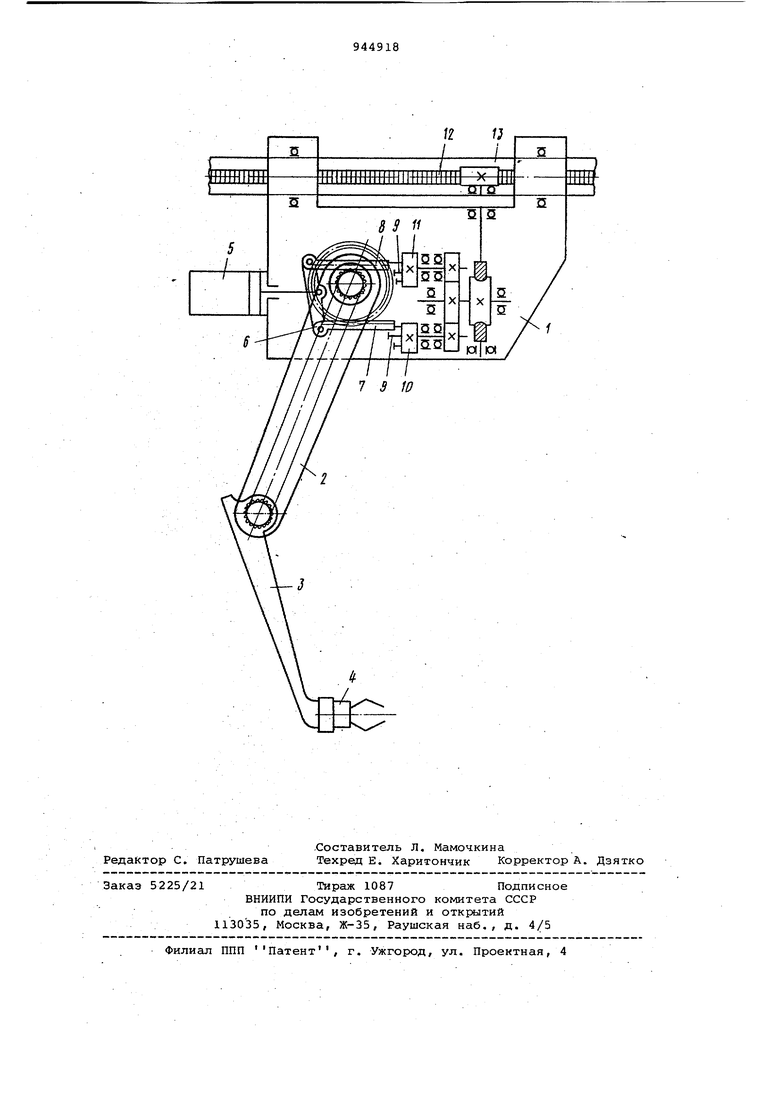
На чертеже изображен предлагаемый автоматический манипулятор.
Автоматический манипулятор включает каретку 1, на которой установлена рука, состоящая из плечевого 2 и локтевого 3 звеньев, кисти 4. На каретке 1 также установлен привод подъема звеньев 2 и 3 руки, состоящий из силового цилиндра 5, рычажной системы 6, реечной 7 плечевого звена и реечной пары 8 локтевого звена.
Напротив реек реечных пар расположены регулируемые упоры 9, установленные на барабанах 10 и 11 управления, которые кинематически с помощью шестерен и червячного зацепления связаны с рейкой 12, закрепленной на трассе 13 перемещения манипулятора. Рейка 12 может являться элементом кинематической цепи привода продольного перемещения манипулятора.
Работает айтоматический манипуля-. тор следукнцим образом.
Каретка 1 перемещается по трассе ; 13, когда рука манипулятора/ с плечевым 2 и локтевым 3 звеньями находится в сложенном состоянии, а кисть 4 за- 5 нимает крайнее верхнее положение.
Над технологическим оборудованием (не показано) каретка 1 останавливается, шток силового цилиндра 5 смещается вправо и через рлчажную сие- 10 тему 6 воздействует на реечные пары
7и 8. Когда рейка реечной пары 7 смещается до регулируемого упора 9 барабана 10, плечевое звено 2 опускается вниз против часовой .стрелки.
Одновременно рейка рее1ной пары
8смицается до регулируемого/упора 9 барабана 11, при этом движение через цепную передачу передается на локтевое звено руки, ,- оно опускается вниз-., по часовой стрелке. Таким образом,
крайнее нижнее положение сХвата 4 фиксируется упорами 9.
После завершения цикла загрузки оборудования силовой цилиндр поднимает кисть 4 BBejjx, рука складывается, при этом рейки отходят от регулируемых упоров 9. При перемещении каретки 1 по трассе 13 происходит поворот барабанов 10 и 11 в ту или иную сторону, в зависимости от направления30 Движения каретки. Угол поворота барабанов 10 и 11 соответствует пути, пройденному манипулятором по трассе, при этом над каждой из рабочих позиций напротив реек останавливаются упо-35 1ры,определяющие положение схвата в ра,бочей зоне данного оборудования.Количество упоров 9 на барабанах 10 и 11
соответствует количеству позиций, обслуживаемых манипулятором.
Размещение приводов в корпусе каретки манипулятора позволит снизить вес механической руки манипулятора, улучшить динамику его работы, а наличие жестких упоров обеспечит высокую точность положения.захвата при загрузке технологического оборудования.
Формула изобретения
Автоматический манипулятор, содержащий каретку, на которой шарнирно установлена рука с плечевым и локтевым звеньями, .и силовой цилиндр для подъема звеньев руки, о т л и ч а ющ и и с я тем, что, с целью расширения технологических возможностей при многостаточном обслуживании, он; снабжен путевым механизмом управления, выполненным в виде установленных на каретке барабанов с упорами и рейки/ расположенной вдоль пути перемещения каретки и кинематически свзанной с барабанами, при этом силовой цилиндр также установлен на каретке и снабжен соединенными с его штоком зубчато-реечными передачаиуи, рейки которых установлены с возможностью взаимодействия с упорами барабанов, а зубчатые колеса связаны соответственно с плечевым и локтевым звеньями руки.
Источники информации, принятые во внимание при экспертизе
1. Белянин П.Н. Промышленные работы Японии. НИАТ, 1977, с. 153.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Рука промышленного робота | 1979 |
|
SU837848A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Устройство для подачи материала в рабочую зону пресса | 1987 |
|
SU1488075A1 |
| Схват манипулятора | 1983 |
|
SU1093548A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Рука манипулятора | 1981 |
|
SU973348A1 |
| МОДУЛЬ МАНИПУЛЯТОРА | 1991 |
|
RU2028928C1 |
| СХВАТ МИКРОМАНИПУЛЯТОРА | 2004 |
|
RU2259915C1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |