Изобретение относится к устройствам автоматического управления и может найти применение в системах автоматического регулирования нестационарными объектами при наличии шумов измерения.
Цель изобретения - повьшение точности работы регулятора,
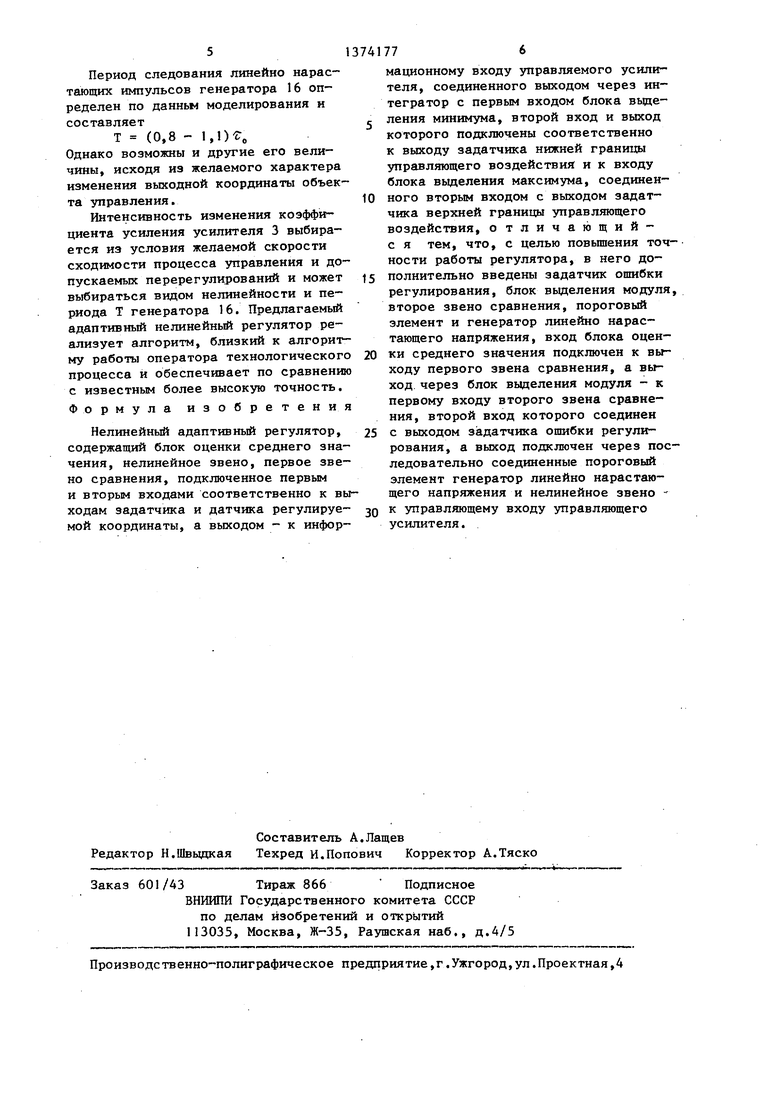
НА чертеже представлена блок-схема нелинейного адаптивного регулятора .
Задатчик 1 подключен на первый вход первого звена 2 сравнения, выход которого через последовательно, включенные управляемый усилитель 3, интегратор 4, блоки вьщеления минимума 5 и максимума 6 управляющего воздействия, на вторые входы которых подключены соответственно выходы за- датчиков нижней 7 и верхней 8 границ управляющего воздействия, подключен на вход объекта 9 управления. К выходу объекта 9 управления подключен датчик 10 регулируемой координаты, выход которого подключен на второй вход первого звена 2 сравнения. К выходу первого звена 2 сравнения под- кгаочен также вход блока 11 оценки среднего значения, выход которого подключен через последовательно включенный блок 12 выделения модуля на первый вход второго звена 13 сравнения, на второй вход которого подключен задатчик 14 ошибки регулирования. Выход второго звена 13 сравнения подключен через последовательно включенные пороговый элемент 15, генератор 16 линейно нарастающего на пряжения и нелинейное звено 17 к уп10
равляющему входу управляемого усилителя 3.
Регулятор работает следующим образом .
Динамические свойства многих объектов управления, например, в углеобогащении, в угледобыче описьшаются апериодическим звеном первого порядка с чистым запаздыванием
W,(p) И-™ , (1)
15
20
TOP
1
25
где Kf, коэффициент усиления объекта;
TQ - постоянная времени объекта;
- время чистого запаздывания;
р - оператор Лапласа. На объекты действуют неконтролируемые стохастические возмущающие воздействия x(t) аддитивного характера, вероятностные характеристики которых допускают рассматривать их как квазистационарные. При
этом время ной функции
спада автокорреляцион.0(2)
Выходная координата у,(t) объекта измеряется с помехой h (t), вероят- 30 ностные характеристики которой неиз- вестны, т.е. на выходе датчика выходной координаты объекта сигнал равен
yi(t)y,(t)+hg(t);
35 hsCt) 0; (3) D (hs(t))a,
где M,D - символы математического ожидания и дисперсии соответственно,
- 40 В регуляторе реализуется следующий закон управления-:
равляющему входу управляемого усилителя 3.
Регулятор работает следующим образом .
Динамические свойства многих объектов управления, например, в углеобогащении, в угледобыче описьшаются апериодическим звеном первого порядка с чистым запаздыванием
W,(p) И-™ , (1)
TOP
1
где Kf, коэффициент усиления объекта;
TQ - постоянная времени объекта;
- время чистого запаздывания;
р - оператор Лапласа. На объекты действуют неконтролируемые стохастические возмущающие воздействия x(t) аддитивного характера, вероятностные характеристики которых допускают рассматривать их как квазистационарные. При
этом время ной функции
спада автокорреляцион
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейный адаптивный регулятор | 1983 |
|
SU1187148A1 |
| Нелинейный адаптивный регулятор | 1985 |
|
SU1303994A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Самонастраивающаяся система автоматического управления для объектов с запаздыванием | 1981 |
|
SU1173390A1 |
| Автоматический регулятор | 1983 |
|
SU1120282A1 |
| АДАПТИВНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2013 |
|
RU2531865C1 |
| Бинарная система управления нелинейными объектами | 1985 |
|
SU1305631A1 |
| Электропривод постоянного тока | 1983 |
|
SU1185517A2 |
Изобретение относится к устройствам автоматического управления и может найти применение в системах автоматического регулирования нестационарными объектами при наличии шумов измерения. Цель изобретения - повышение точности работы регулятора. В устройстве задатчик 1 подключен на первый вход первого звена сравнения 2, выход которого через последоваW 44fH3 тельно включенные управляемый усилитель 3, интегратор 4, блок выделения минимума 5 и блок выделения максимума 6 управляющего воздействия, на вторые входы которых подключены соответственно выходы задатчиков нижней 7 и верхней 8 границ управляющего воздействия, подключен на вход объекта 9 управления, к выходу которого подключен датчик 10 регулируемой координаты, выход которого подключен на второй вход первого звена сравнения 2. К выходу первого звена сравнения 2 подключен также вход блока 11 оценки среднего значения, выход которого подключен через последовательно включенный блок выделения модуля 12 на первый вход второго звена сравнения 13, на второй вход которого подключен задатчик 14 ошибки регулирования. Выход второго звена сравнения 13 подключен через последовательно включенные пороговый элемент 15, генератор линейного нарастающего напряжения 16 и нелинейное звено 17 - к управляющему входу управляемого усилителя 3. 1 ил. i (Л СА:, 4 1 yift} ifM-f frtf }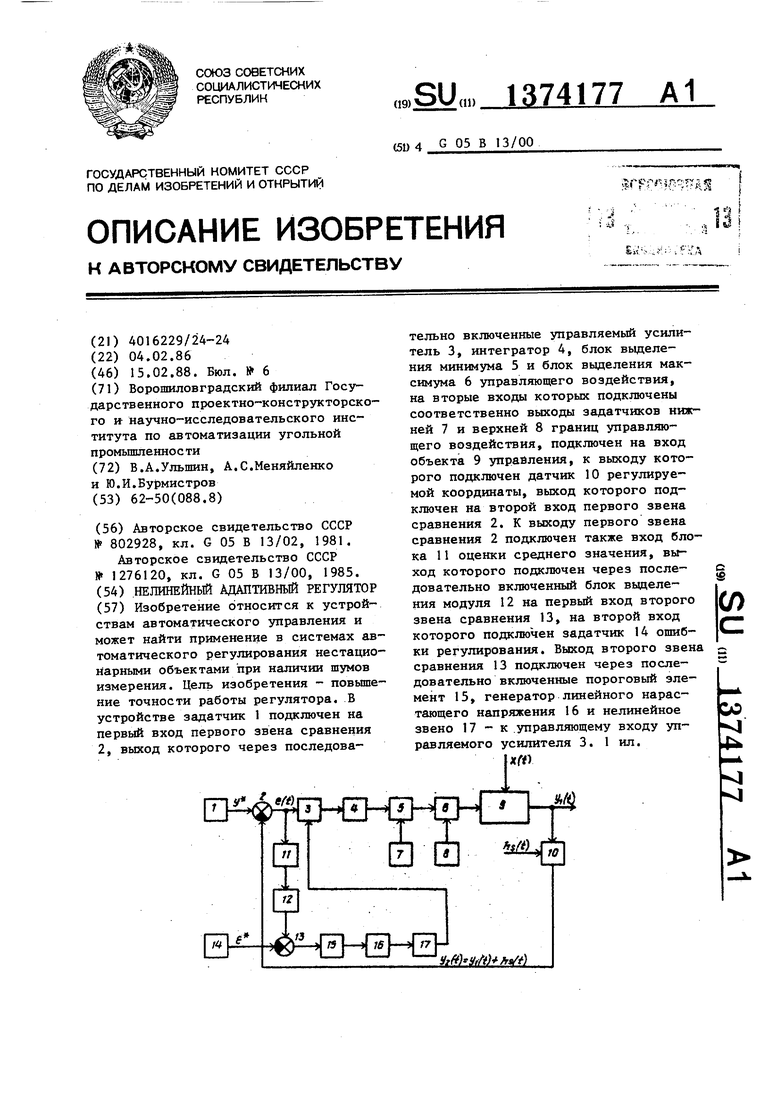
V
мнч
при V.,,. - N,
V(t)
N S y(t)((t))(t)l ,
маис
При V.,,N.
(4j -Б .
где yCt) - коэффициент усиления управляемого усилителя 3.
Со
Например, J(t)- ---р)
GO,do - константы; F(t) - нелинейное звено;
(4)
1 при iM(t)| О, при (t),
у (t) - выходная координата объекта;
5 у заданное значение выходной координаты; 6(t) - ошибка регулирования; Б - заданное значение ошибки регулирования;
V(t) - управляющее воздействие
на входе объекта; V.,u, минимальное и максимальгЛп Н WM к с
ное значения управляющего воздействия; М - символ математического
ожидания; t - время.
Нелинейное звено 17 формирует, например, один из следующих законов:
F(t) o4t; F(t) с„, (6) где - константа.
Выход первого звена 2 сравнения подается на вход блока 11 оценки среднего значения. В блоке 11 определяется оценка математического ожидания Mr(t)4 ощибки регулирования. Выходной сигнал блока 11 подается на вход блока 12 выделения модуля ука- ванного сигнала, т.е. на выходе блока 12 сигнал равен |M{(t)|.
Сигнал с выхода блока 12 сравнивается на втором звене 13 сравнения с сигналом задатчика 14 ошибки регу- лирования . На выходе второго звена 13 сравнения образуется сигнал, равный lM{e(t).
При этом возможны следующие три случая:
Допустим, начиная с момента времени t О имеет место первый случай (7).
При этом на выходе второго звена 13 сравнения сигнал меньше или равен , а знак сигнала отрицательный или равный нулю. Следовательно, на входе порогового элемента 15 от- рицательньй или рАвный нулю сигнал, а на выходе этого элемента сигнал отсутствует. С выхода генератора 16 линейного нарастающего напряжения по дается постоянное напряжение U, максимальной величины через последовательно включенное нелинейное звено 17 на управляющий вход усилителя 3 и его коэффициент усиления равен нулю (j(t)0).
Поэтому на входе интегратора 4 .сигнал также равен нулю, а на выходе его имеется постоянньй сигнал V,j,
;V (O)V ,,поступающий через посMOlXC
ледовательно включенные блоки выделения минимума 5 и максимума 6 управляющего воздействия на вход объекта 9
Q
5 0
5
0
5
0 0
5
Таким образом, система регулирования в этом случае оказьюается разомкнутой.
Пусть теперь в момент времени возмущение воздействия x(t) нарушает условия (7). В данном случае имеет место второй случай (8). Тогда на выходе первого звена 2 сравнения 5(t)7tO, а м(. На входе усилителя 3 сигнал отличен от нуля. На выходе второго звена 13 сравнения сигнал больше нуля, поэтому на выходе порогового элемента 15 сигнал также не равен нулю. Последний запускает генератор 16 линейно нарастающего напряжения, выходной сигнал которого через нелинейное звено 17 поступает на управляющий вход усилителя 3 и снижает коэффициент усиления (за счет щунтирования его входа). Линейно нарастающий сигнал генератора 16 U(t) достигает своего максимального значения Ufl, в этот момент коэффициент усиления усилителя 3jj (t) падает до нуля. Цикл работы генератора повторяется через время Т (период следования импульсов).
После того, как усилитель 3 восстановит максимальный коэффициент усиления, начинает изменяться управляющее воздействие V(t). При этом выходная величина интегратора 4 начинает отслеживать рассогласование при периодически изменяющемся коэффициенте усиления усилителя 3.
В момент t tj условия (7) восстанавливаются,, поэтому коэффициент усиления усилителя 3 скачком падает до нуля, так как в силу условия (7) на управляющем входе усилителя скачком появляется напряжение U(t)U(}.
В момент времени имеют место условия (9).
При этом система работает анало- .гично случаю (8) до тех пор,пока в момент времени t t, не восстановятся условия (7).
При управляющем воздействии V(t) const, напряжение U(t) скачком увеличивается до Ujj, а коэффициент усиления до у(, т.е. система управ- ; ления снова размыкается. Так как сигнал на входе интегратора 4 при этом становится равньи нулю, на его выходе остается сигнал V(t), достиг- нутый в момент восстановления условия (7).
Период следования линейно нарастающих импульсов генератора 16 определен по данньм моделирования и составляет
Т (0,8 -
Однако возможны и другие его величины, исходя из желаемого характера изменения выходной координаты объекта з правления.
Интенсивность изменения коэффициента усиления усилителя 3 выбирается из условия желаемой скорости сходимости процесса управления и допускаемых перерегулирований и может выбираться видом нелинейности и периода Т генератора 16. Предлагаемый адаптивный нелинейный регулятор реализует алгоритм, близкий к алгоритму работы оператора технологического процесса и обеспечивает по сравнению с известным более высокую точность. Формула изобретения
Нелинейный адаптивный регулятор, содержащий блок оценки среднего значения, нелинейное звено, первое звено сравнения, подключенное первым и вторым входами соответственно к выходам задатчика и датчика регулируе- мой координаты, а выходом - к инфор
мационному входу управляемого усилителя, соединенного выходом через интегратор с первым входом блока вьщеления минимума, второй вход и выход которого подключены соответственно к выходу задатчика нижней границы управляющего воздействия и к входу блока вьзделения максимума, соединенного вторым входом с выходом задатчика верхней границы управляющего воздействия, отличающий- с я тем, что, с целью повьппения точности работы регулятора, в него дополнительно введены задатчик ошибки регулирования, блок выделения модуля, второе звено сравнения, пороговый элемент и генератор линейно нарастающего напряжения, вход блока оценки среднего значения подключен к выходу первого звена сравнения, а выход через блок выделения модуля - к первому входу второго звена сравнения, второй вход которого соединен с выходом задатчика ощибки регулирования, а выход подключен через последовательно соединенные пороговый элемент генератор линейно нарастающего напряжения и нелинейное звено - к управляющему входу управляющего усилителя.
| Адаптивный регулятор | 1979 |
|
SU802928A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР 1276120, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
