Изобретение относится к области автоматизации и механизации технологических про- . цессов и может быть использовано для ориентации, фиксации и подачи ферромагнитных изделий.
Цель изобретения - повышение точности ориентации ферромагнитных изделий, состоящих из механически не связанных друг с другом парных деталей.
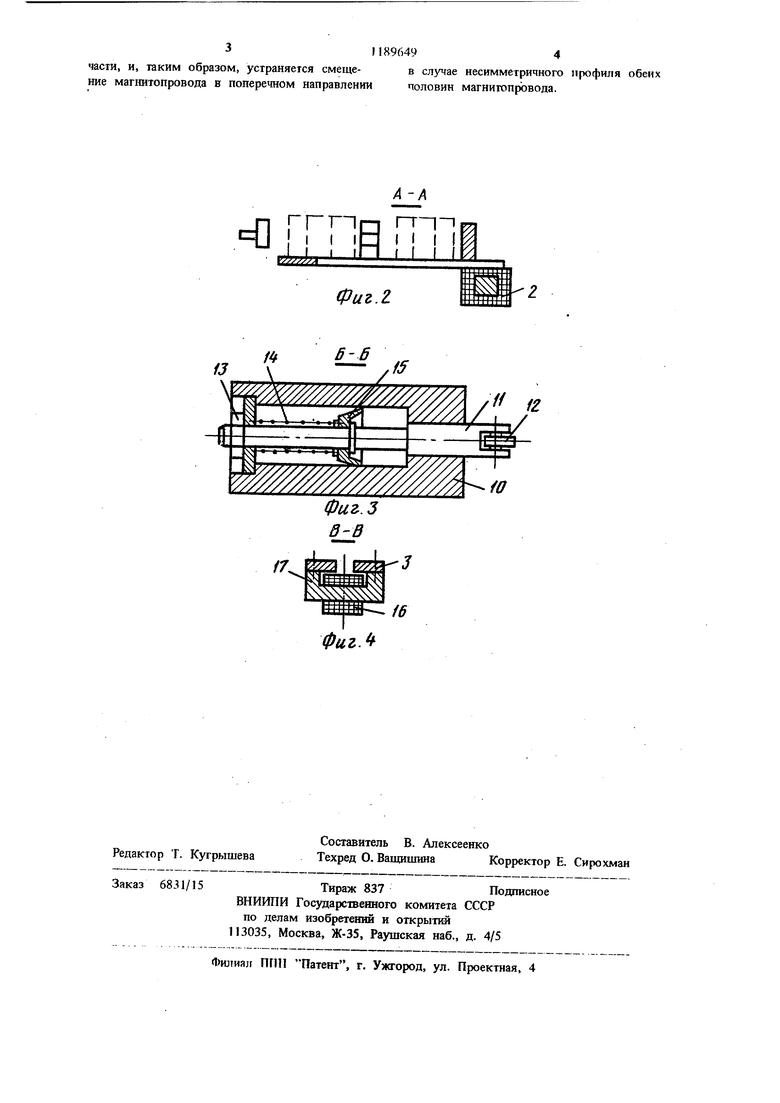
На фиг. 1 представлено предложенное устройство, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Устройство для ориентации ферромагнитных изделий состоит из бесконтактных электромагнитных датчиков 1, электромагнита с катущкой 2 и магнитным шунтом 3 в виде П-образной в рабочей плоскости ферромагнитной пластины со щелевьпи зазором, бесконтактных электромагнитных датчиков 4, толкателя 5, подающего лотка 6, симметрирующего механизма 7 (пунктиром показаны группы изделий на. исходной позиции 8 и на выходной позиции 9).
Симметрирующий механизм содержит две стойки 10 (фиг.З), симметрично установленные относительно оси щелевого зазора пластины магнитного шунта 3, внутри которых размещены толкатели И с роликовыми наконечниками 12 и регулируемыми упорами 13, тарированные пружины 14 и пневматические демпферы 15. Электромагнит (фиг. 4) выполнен в виде катушки 16, установленной на подковообразном сердечнике 17, жестко закрепленном на магнитном шунте в виде П-образной пластины со щелевым зазором; питание электромагнит получает от источника постоянного тока (не показан).
Устройство работает следующим образом.
Ферромагнитные изделия в виде разрезных магнитопроводов трансформаторов после автомата разрезки магнитопроводов поступают по подающему лотку 6 на исходную позицию 8, где регистрируются по наличию и правильной предварительной ориентации группы изделий бесконтактным электромагнитным датчиком 4. В подающем лотке 6 магнитопроводы перемещаются друг за другом, при этом их ориентация относительно оси лотка строго не выдерживается ввиду разброса размеров магнитопровода по ширине (в пределах допуска) При уста}говке магнитопровода на исходной позиции 8 его поперешая герметрическая ось также не совпадает с осью щелевой пластины магнигного ujyHTa 3 из-за разброса продольных размеров магнитопроводов и колебаний порюгл чувствительности датчика 4. На
выходной позиции 9 для обеспечения работы автооператора каждый магнитол ровод должен быть установлен строго симметрично относительно оси щелевой пластины, а его продол; 5 пая ось должна быть перпендикулярной к оси пластины и совпадать с осью захватных органов автооператора. Кроме этого, обеспечение условий ориентации магнитопроводов выполняется за счет использования следующих устройств: толкателя 5 с контактной поверх ностью, перпендикулярной к оси щелевой пластины, симметрирующего механизма 7 и электромагнита 2. Далее, перемещаясь толкателем 5 через симметрирующий механизм 7,
группы изделий фиксируются в сориентированном состоярши за счет магнитных сил электромагнита с катушкой 2 и магнитным щунтом 3, при этом усилие, надежность и точность ориентации возрастают по мере
0 перемещения группы изделий к выходной позиции 9. После фиксации положения и правильной ориентации группы изделий на выходной позиции 9 бесконтактными электромагнитными датчиками 1 изделия передаются манипулирующим устройством на последующие позции (показа1Ю на фиг. 1 двумя пунктирными дуговыми стрелками).
Симметрирующий механизм работает сле0 дующим образом.
В исходном состоянии тарирова1шые пружины 14 с одинаковыми рабочими характеристиками создают равные усилия вдоль оси
5 толкателей 11 в направлении к оси щелевой пластины. Ход толкателей ограничен регулируемыми упорами 13, предварительно настроенными с помощью шаблона на минимальный размер магнитопровода. При перемещении
0 вдоль щелевой пластины электромагнита магнитопроводов, имеющих другие размеры (в пределах установлешюго допуска) и смещенных относительно щелевого зазора пластины в ту или другую сторону на величину,
5 .определяемую зоной чувствительности датчика 4 (фиг. 1), магиитопровод, перемещаемый толкателем 5 (фиг. 1) вдоль пластины, вхоми дит в соприкосновение с одним из роликов толкателя, который перемещает магнитопро0 вод к центральной оси пластины до соприкосновения с другим роликом, после чего
пружины толкателей устанавливают магнитопровод симметрично относительно щелевого зазора пластины. Пневматический демпфер при
5 обратном ходе толкателей 11 значительно
уменьщает скорость их перемещения, вследствие чего устраняется контакт роликов с поверхностью магнитопровода в его тьшыюй
311896494
части, и, таким образом, устраняется смеще-в случае несимметричного профиля обеих
ние магнитопровода в поперечном направлении половин магнитопровода.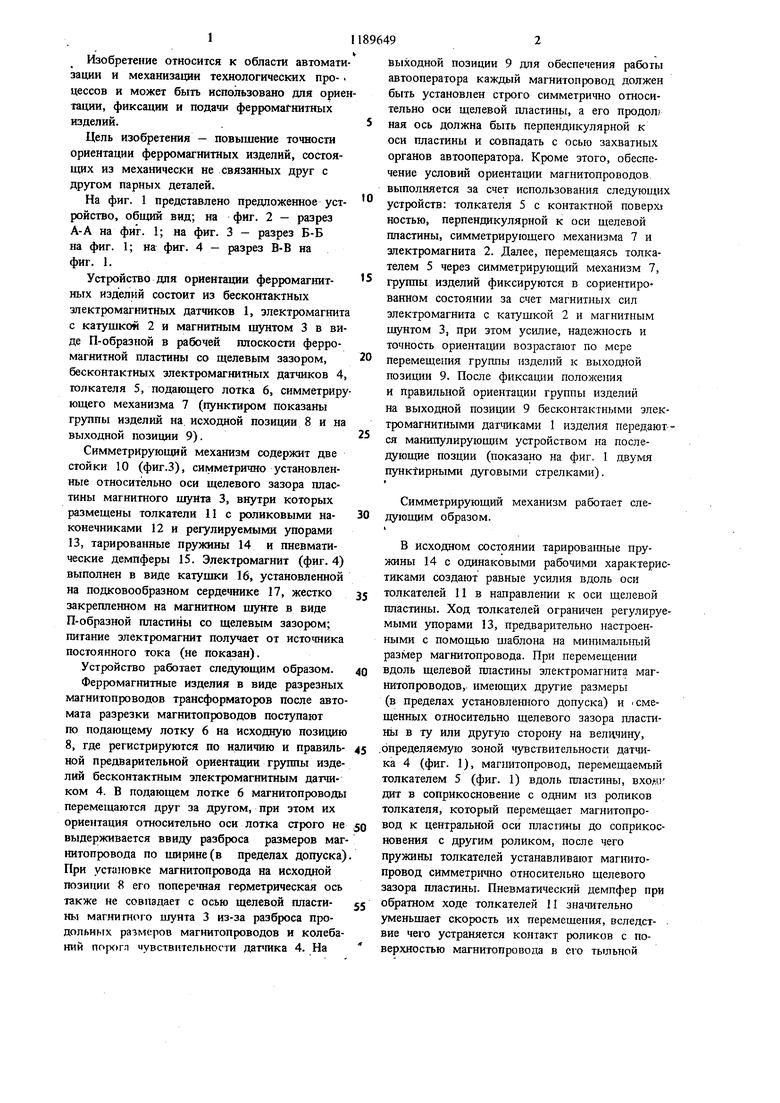
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ ЛИНЕЙНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2149493C1 |
| Магнитная система сканера-дефектоскопа | 2016 |
|
RU2680103C2 |
| Автооператор к автомату контроля магнитопроводов | 1984 |
|
SU1259347A1 |
| СПОСОБ ЭЛЕКТРОМАГНИТНОГО ПРЕССОВАНИЯ ИЗДЕЛИЙ ИЗ ПОРОШКОВЫХ ФРАКЦИЙ, ОРИЕНТИРУЕМЫХ В МАГНИТНОМ ПОЛЕ, И ЭЛЕКТРОМАГНИТНЫЙ ПРЕСС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1994 |
|
RU2086028C1 |
| Автомат для сборки сердечников магнитопроводов электрических машин | 1980 |
|
SU959220A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2159984C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПОВОРОТНЫЙ ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ | 2023 |
|
RU2819305C1 |
| СПОСОБ БЕСКОНТАКТНОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2661312C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ЗАМОК | 2011 |
|
RU2485270C1 |
УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ФЕРРОМАГНИТНЫХ ИЗДЕЛИЙ, содержащее подающий и отводящий лотки, ориентирующую систему и транспортирующую систему для подачи изделий через зону ориентации, отличающееся тем, что, с целью повышения точности ориентации ферромагнитных изделий, состоящих из механически несвязанных друг с другом парных деталей, ориентирующая система выполнена состоящей из двух позиций ориентадаи, на каждой из которых установлены датчики контроля положения изделий, на первой позиции установлено подающее устройство, предназначенное для перемещения изделий на вторую позицию через введенный в устройство симметрирующий механизм, установленный на транспортирующей системе, выполненной в виде электромагнита с П-образным сердечником, предназначенным для транспортирования детали, причем симметрирующий механизм вьшолнен из двух подпружиненных и снабженных демпферами толкателей, S установленных на перемычке сердечника симсл метрично относительно его оси симметрии и предназначенных для взаимодействия с изделиями. 00 :О О5 4 СО т Цг фия.1
6-6
ФигЛ
15
11 1Z
| Устройство для ориентации асимметричных ферромагнитных деталей | 1977 |
|
SU715287A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Автоматдля центрирования деталей | 1974 |
|
SU516508A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
| Устройство для транспортирования и накопления ферромагнитных деталей | 1975 |
|
SU529782A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
