СО
Ю
11
Изобретение относится к машиностроению, в частности к робототехнике, и предназначено для захвата, переноса и укладки длинномерных деталей цилиндрической формы типа валов, труб и т.п.
Цель изобретения - расширение технологических возмо нрстей за счет обеспечения захвата длинномерных деталей типа валов в узких, трудно доступных местах, например узких тарах, траншеях, емкостях и т.п.
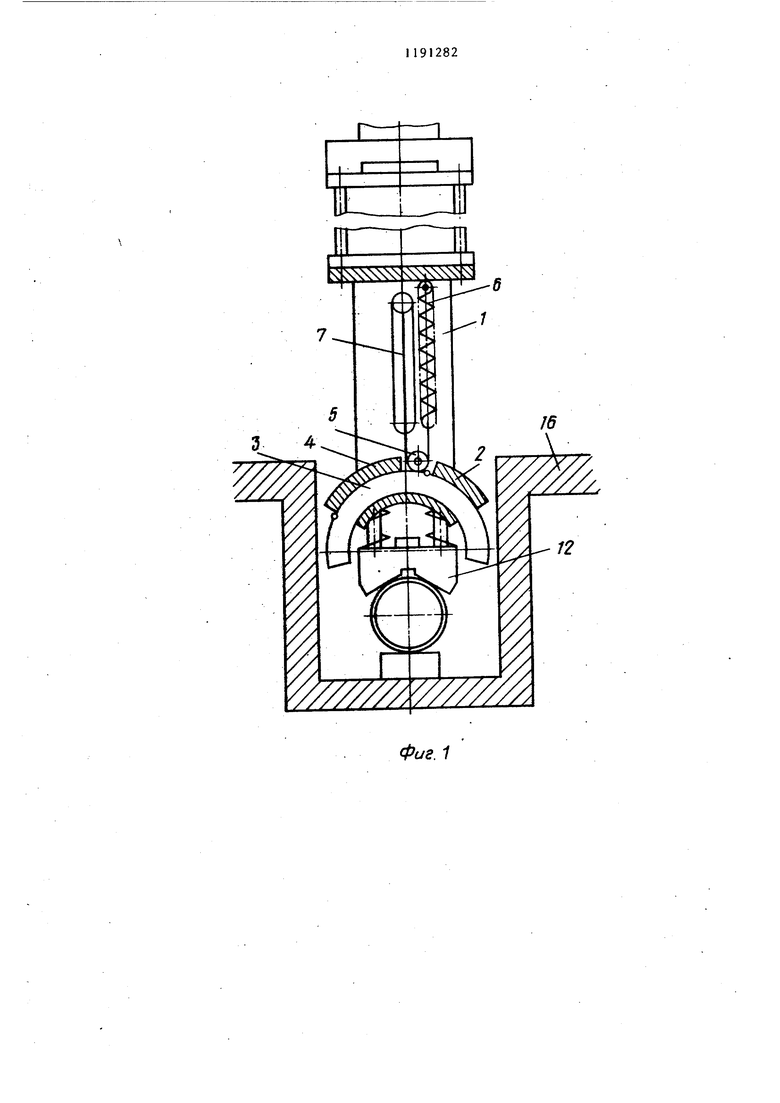
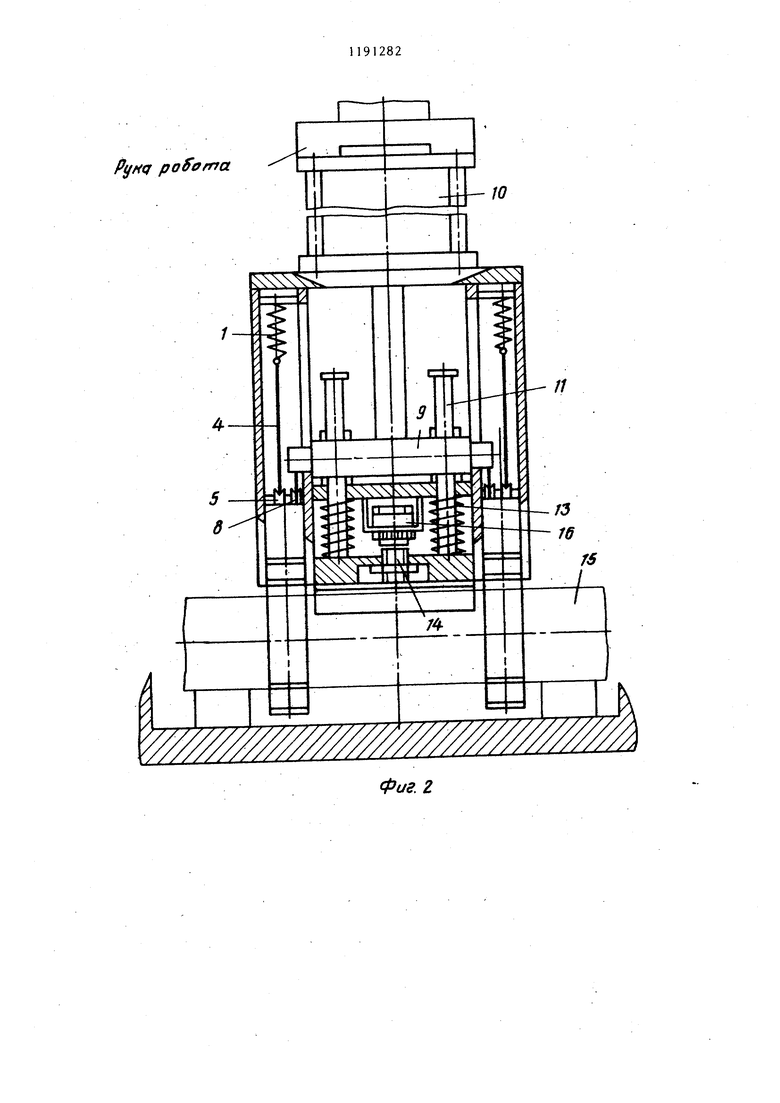
На фиг. 1 изображено захватное устройство, общий вид; на фиг. 2 то же, вид сбоку; на фиг. 3 - то же, .рабочее состояние.
Захватное устройствосодержит корпус 1, в криволинейных направляющих 2 которого установлены подхватывакхцие элементы 3, выполненные в виде двух незамкнутых колес. Подхватывающие элементы 3 с одной стороны связаны с корпусо1 4 1 через гибкие тяги, например тросы 4, ролик 5 и пружину 6, с другой стороны через гибкие тяги 7, ролик 8 и траверсу 9 - со штоком силового цилиндра 10, размещенного на руке робота (не показана }.
В корпусе 1 на направляющих скалках 1I установлен центральный зажимной элемент 12, подпружиненный пружинами 13 и снабженный регулируемым упором 14. Для захвата детали 15 за822
жимной элемент 12 выполнен в виде призмы. Последний взаирмодействует с переключателем 16, смонтированным на траверсе 9.
Захватное устройство работает следуюп(им образом.
Захватное устройство вносится внутрь, например, тары до соприкосновения поверхностей центрального зажимного элемента 12 и детали 15. По мере опускания руки пружины 13 деформируются до тех пор, пока установленный на зажимном элементе 12 регулируемый упор 14 не войдет в контакт с переключателем 16. Последний выдает команду на останов руки и пуск сжатого воздуха в поршневую полость силового цилиндра 10, при этом траверса 9 опускается и ослабляются гибкие тяги 7, которые под действием пружины 6 перемещаются вокруг ролика 5, приводят в движение подхватывакщие элементы 3, выполненные в виде незамкнутых колец, и поворачиваются по окружности в направляющих 2, огибая при этом деталь 15 снизу и зажимая ее.
Поступает команда на подъем руки и-дальнейшее ее перемещение согласно технологическому циклу.
Предлагаемое устройство позволяет .автоматизировать трудоемкие процессы захвата длинномерных деталей типа .валов в узких труднодоступных местах.
Фиг. 1 Рунд робот
Фиг. г а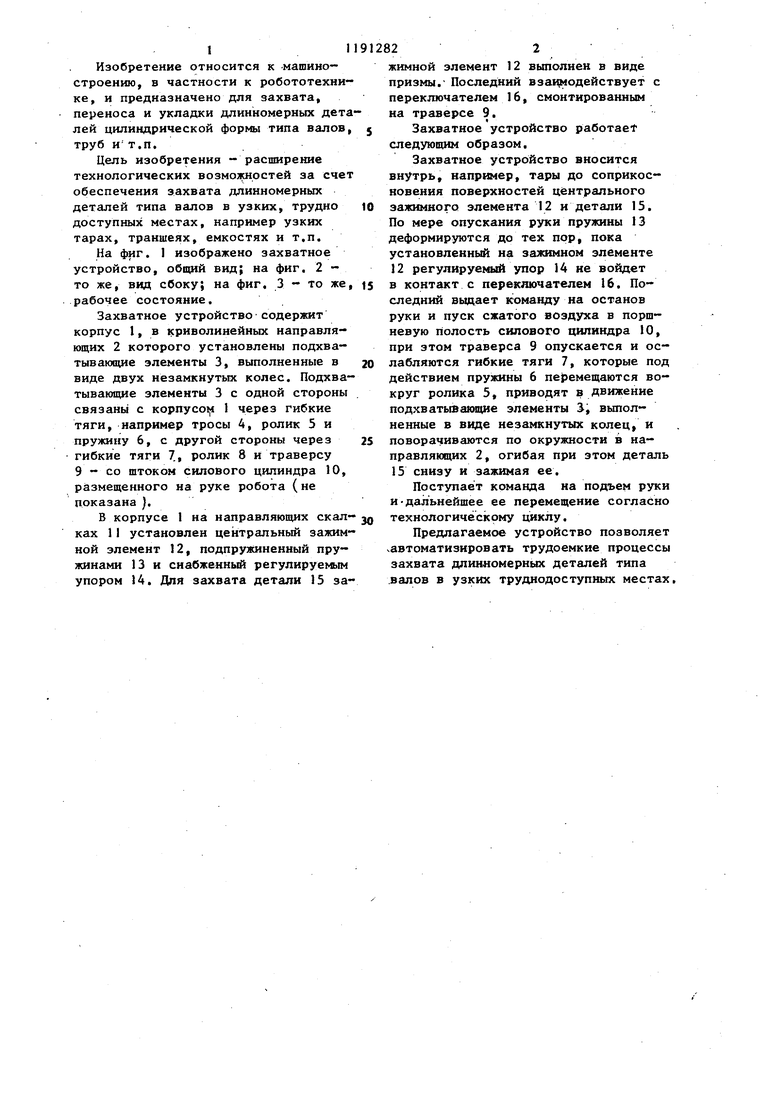
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1991 |
|
RU2022781C1 |
| Кисть манипулятора | 1987 |
|
SU1423372A1 |
| Промышленный робот | 1988 |
|
SU1604496A2 |
| Грузоподъемное устройство | 1974 |
|
SU622745A1 |
| Промышленный робот | 1983 |
|
SU1155334A1 |
| Захватное устройство | 1984 |
|
SU1197835A1 |
| Устройство для подачи длинномерного материала в зону обработки | 1983 |
|
SU1107931A1 |
| Автооператор | 1984 |
|
SU1191256A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, содержащее корпус. В криволинейных направляющих которого установлены подхватывакнцие элементы, связанные с силовьм цилиндром, и цеитрапьиый зажимной элемент, установленный иа руке с возможностью перемещения вдоль ее оси, отличающееся тем, что, с целью расширения технологических возможностей, каждый подхватываю|ций элемеит выполнен в виде незамкнутого кольца, установленного с возможностью поворота в криволинейных направляющих, причем незамкнутое кольцо с одной стороны связано подпружиненной гибкой тягой с 9 корпусом, а с другой - гибкой тягой с порпшем силового цилиндра.
| Боренштейи Ю | |||
| П | |||
| Исполнительные механизмы захватывающих устройств | |||
| - Л.: Машиностроение, 1982, с, 24-25, рис | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
