Фиг. 5
ы
б
Изобретение относится к станко- ;строению, в частности к загрузочным устройствам многоцелевых станков.
Цель изобретения - расширение тех- нологических возможностей станка.
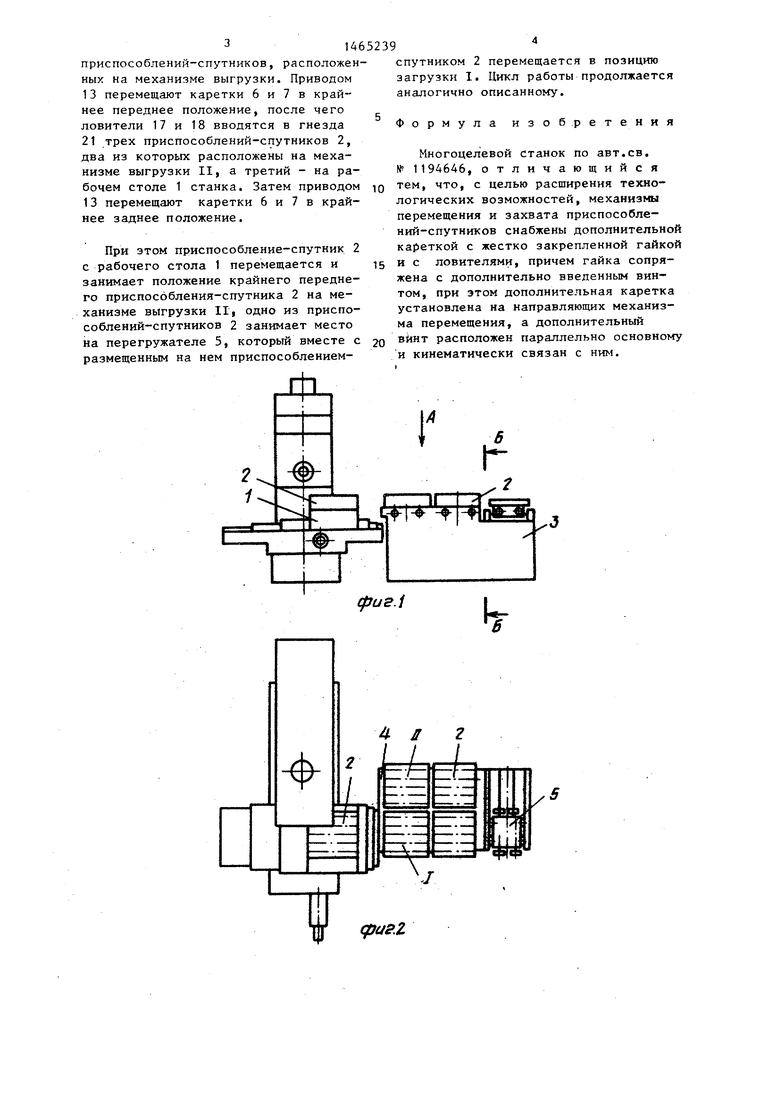
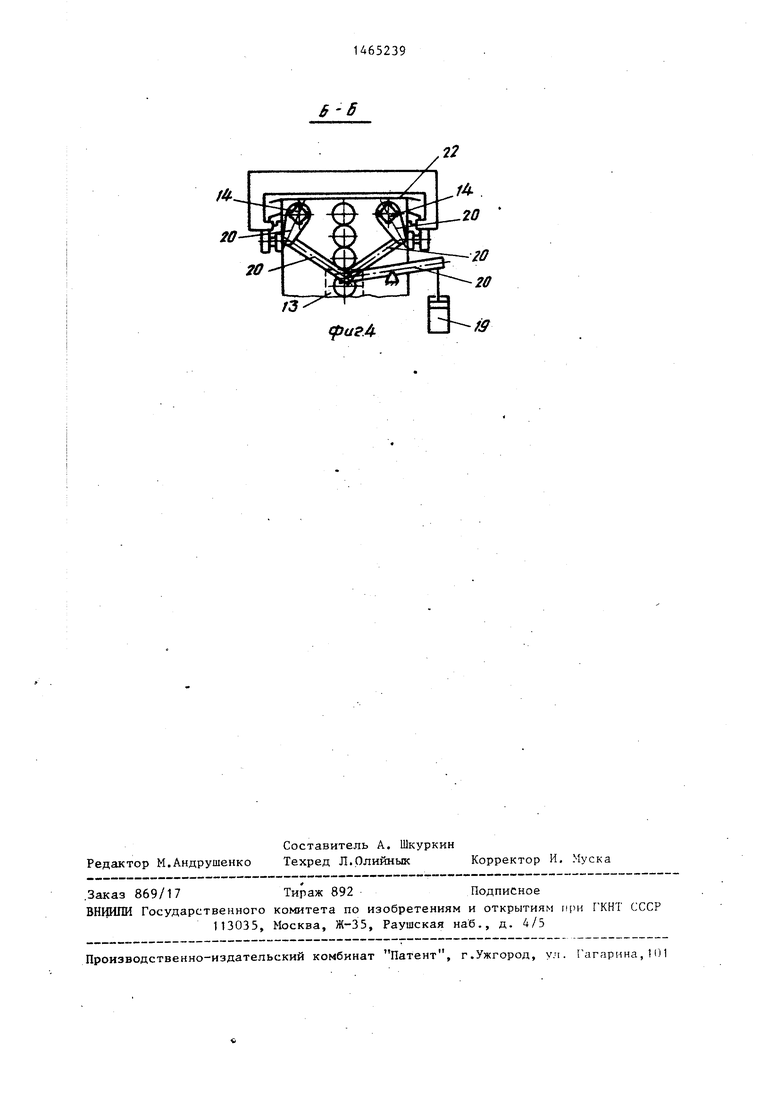
На фиг. 1 изображен многоцелевой станок, вид спереди; на фиг. 2 - то же, вид в плане; на фиг. 3 - вид А на фиг. 1 .(без перегружателя и приспособлений-спутников на устройстве для их автоматической смены); на |фиг. 4 - разрез Б-Б на фиг. 1.
Многоцелевой станок содержит рабочий стол 1 с устройством для фик- : сации (не показано) приспособлений- i спутников 2 и расположенное у станка основание 3, на котором размещено : линейное многоместное устройство 4 для автоматической смены прислосрб- лений-спутников 2.
Устройство 4 состоит из двух 1 и II идентичных расположенных парал- лельно друг другу механизмов для перемещения и захвата приспособлений- f спутников и перегружателя 5, транс- S портирующего приспособления-спутники с одного механизма на другой. Приспособления-спутники 2 размещены на устройстве 4 с зазором. Расстояние меж- ду крайним приспособлением-спутником 2 и рабочим столом 1 станка в позиции смены определяется конструкцией защитног о ограждения зоны резания.
Каждый механизм перемещения приспособления-спутника содержит основную каретку 6 и дополнительную каретку 7, на которых жестко закреплены гайки 8. На основании 3 закреплены кронштейны 9 и 10, в которых уста- новлены параллельно друг другу основной винт 11 и дополнительный винт 12 с приводом вращения 13 и щлице- вые валы 14, служащие общими направляющими под каретки 6 и 7. В последних выполнено по два отверстия, со- - пряженных с наружньми цилиндрическими поверхностями валов 14. Винты 11 и 12 связаны между собой шестернями 15 и 16 с заданньм передаточны отношением, обеспечивающим перемещение кареток 6 и 7 на разное расстояние .
Механизм захвата приспособления- спутника состоит из ловителей 17 и 18, которые имеют шлицевые отверсти сопряженные со шлицевыми валами U с возможностью поворота ловителей относительно кареток 6 и 7. Привод
0
15
20
25 30
40, 35
45
55
поворота ловителей 17 и 18 выполнен в виде гидроцилиндра 19 и системы рычагов 20. С внутренних сторон направляющих приспособления-спутника 2 расположены гнезда 21 под ловители 17 и 18. На кронштейнах 9 и 10 закреплена защитная крышка 22, расположенная над механизмами захвата и перемещения по всей длине.
Многоцелевой станок работает следующим образ ом.
Детали, подлежащие обработке устанавливают на приспособления-спутники 2, размещенные на устройстве 4. На фиг. 2 приведен пример пятиместного устройства. 1-й механизм перемещения приспособлений-спутников 2 является механизмом загрузки приспособлений-спутников на станок, а 11-й - выгрузки приспособлений-спутников 2 со стола станка на устройство 4.
При поступлении команды на загрузку станка рабочий стол 1 станка перемещается в позицию загрузки I и перегружатель 5 также устанавливается в позицию загрузки I. Гидроцилиндр 19 через систему рычагов 20 и шлицевые . валы 14 поворачивает ловители 17 и 18, вводя их в гнезда 21 трех, приспособлений - спутников 2, два из которых расположены на механизме загрузки I, а третий - на перегружателе 5.
Приводом 13 перемещают каретки 6 и 7 в переднее положение, при этом каретка 6 перемещает крайнее приспособление-спутник 2 на рабочий стол 1 станка, а каретка 7 перемещает каждые последующие приспособления- спутники 2 на место предыдущих.
После этого гидроцилиндром 19 производят поворот ловителей 17 и 18 и выводят их из гнезда 21 приспособлений-спутников 2. Механизм перемещения отводит каретки 6 и 7 в крайнее заднее положение. После окончания цикла загрузки начинается цикл обработки детали.
По окончании обработки детали рабочий стол 1 перемещается в позицию выгрузки II, где производится расфик- сация приспособления-спутника 2, и перегружатель устанавливается также в позицию выгрузки II. Гидроцилиндр -19 через систему рычагов 10 и шлицевые валы 14 поворачивает ловители 17 и 18, вьшодя их из гнезд 21 Двух
приспособлений-спутников, расположенных на механизме выгрузки. Приводом 13 перемещают каретки 6 и 7 в крайнее переднее положение, после чего ловители 17 и 18 вводятся в гнезда 21 трех приспособлений-спутников 2, два из которых расположены на механизме выгрузки II, а третий - на рабочем столе 1 станка. Затем приводом 13 перемещают каретки 6 и 7 в крайнее заднее положение.
При этом приспособление-спутник 2 с рабочего стола 1 перемещается и занимает положение крайнего переднего приспособления-спутника 2 на механизме выгрузки II, одно из приспособлений-спутников 2 занимает место на перегружателе 5, который вместе с размещенным на нем приспособлением
спутником 2 перемещается в позицию загрузки I. Цикл работы продолжается аналогично описанному.
Формула изобретения
Многоцелевой станок по авт.св. № 1194646, отличающийся тем, что, с целью расширения технологических возможностей, механизмы перемещения и захвата приспособлений-спутников снабжены дополнительной кареткой с жестко закрепленной гайкой и с ловителями, причем гайка сопряжена с дополнительно введенным винтом, при этом дополнительная каретка установлена на направляющих механизма перемещения, а дополнительный винт расположен параллельно основному и кинематически связан с ним.
qjas.Z
/3
(.4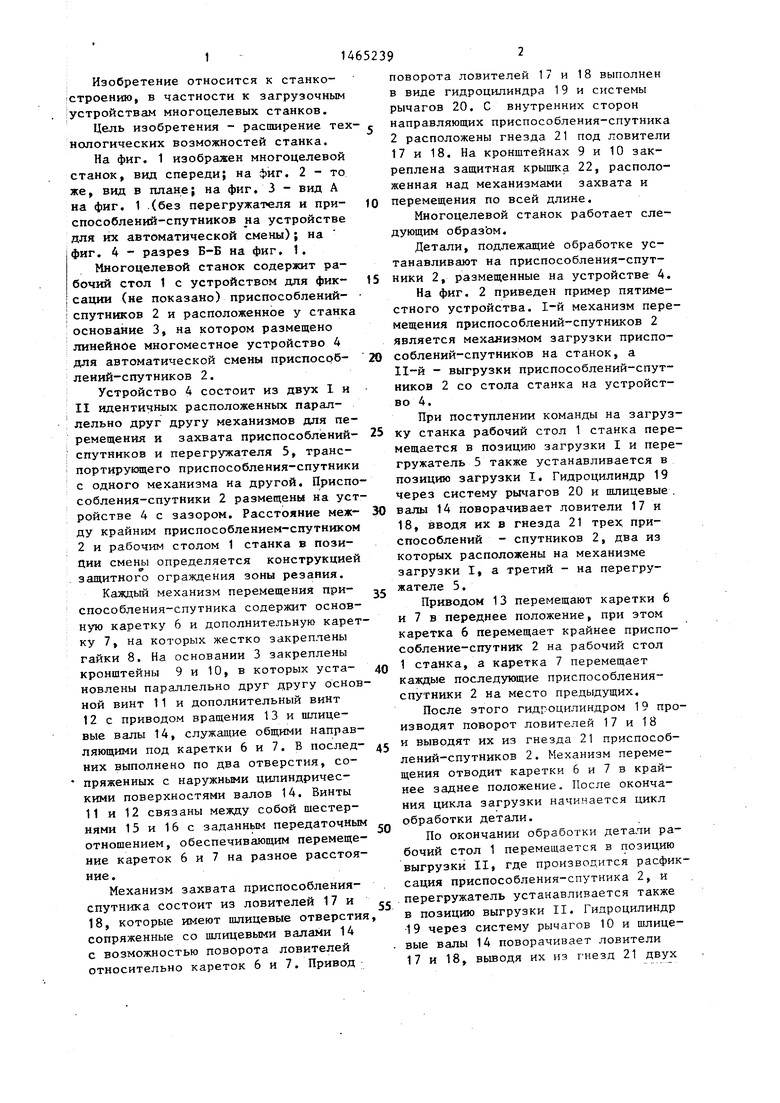
| название | год | авторы | номер документа |
|---|---|---|---|
| Многоцелевой станок | 1984 |
|
SU1194646A1 |
| Устройство для автоматической смены спутников на металлорежущем станке | 1983 |
|
SU1106637A1 |
| Устройство для автоматической смены приспособлений-спутников | 1989 |
|
SU1722778A1 |
| СТАНОК ДЛЯ ЗАВИНЧИВАНИЯ ШПИЛЕК | 2001 |
|
RU2197368C2 |
| Гибкий автоматизированный участок | 1986 |
|
SU1542781A1 |
| Многоцелевой станок с ЧПУ | 1983 |
|
SU1090538A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Металлорежущий станок | 1990 |
|
SU1830333A1 |
| Многооперационный станок с автоматической сменой приспособлений-спутников | 1979 |
|
SU856751A1 |
| Многоцелевой станок с ЧПУ | 1983 |
|
SU1166965A1 |
Изобретение относится к станкостроению. Целью изобретения является расширение технологических возможностей станка. Гидроцилиндр через систему рычагов 20 поворачивает ловители 17 и 18, вводя их в гнезда 21 трех приспособлений-спутников, два из которых расположены на механизме загрузки, а третий - на перегружателе. Приводом 13перемещают каретку 6 и дополнительную каретку 7 в переднее положение, при этом каретка 6 перемещает спутник на рабочий стол станка, а каретка 7 перемещает последующие два спутника на место предьщущих, 4 ил.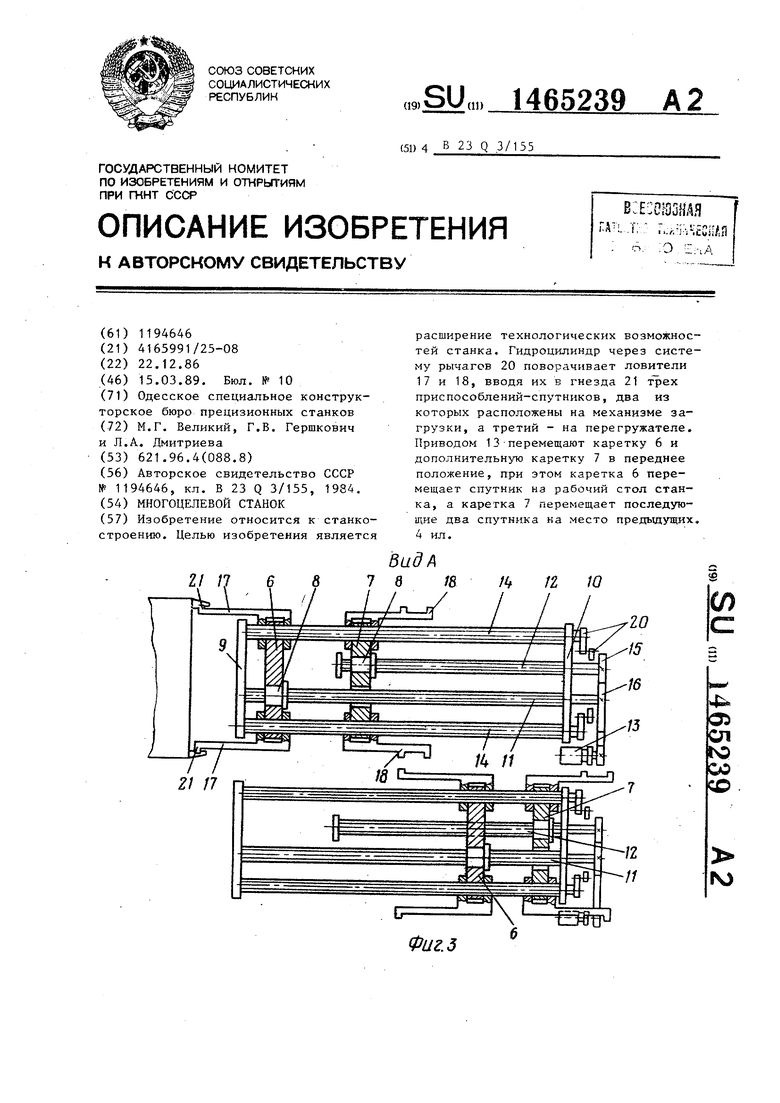
| Многоцелевой станок | 1984 |
|
SU1194646A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
