Изобретение относится к машиностроению, а именно к оборудованию для механизации и автоматизации вспомогательных технологических операций, и может быть применено в штамповочных цехах на операциях загрузки изделия в рабочую зону и выгрузки готовой детали и отхода из рабо чей зоны.
Цель изобретения - повышение производительности путем совмещения операции загрузки и выгрузки изделия в рабочей зоне и расширение технологических возможностей за счет обеспечения возможности работы с изделиями в широком диапазоне размеров.
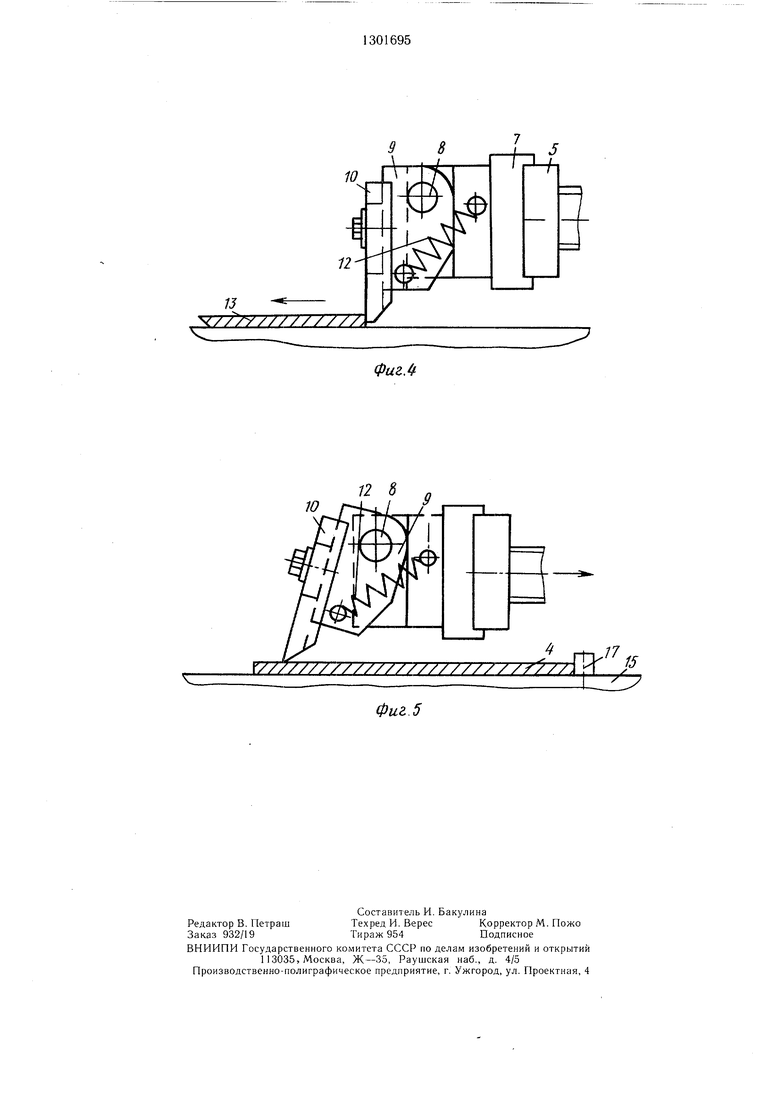
На фиг. 1 изображена механическая рука манипулятора в положении загрузки изделия в рабочую зону и выгрузки изделия из рабочей зоны; на фиг. 2 - то же, вид сверху; на фиг. 3 - вид А на фиг. 2; на фиг. 4 - подаюш,ее средство при входе механической руки манипулятора в рабочую зону; на фиг. 5 - то же, при возврате механической руки манипулятора в исходное положение.
Механическая рука манипулятора жестко связана со штоком 1 (фиг. 1 и 2) привода возвратно-поступательного перемещения (не показан), а захватная головка 2 со схватом 3, в частности магнитным, электромагнитным или вакуумным, удерживающим изделие 4, закреплена на механической руке манипулятора. Подающее устройство установлено на механической руке манипулятора перед захватной гоЛовкой 2 и, соответственно, перед схватом 3. Подающее устройство выполнено в виде фланца 5 с направляющей, закрепленного на торце руки манипулятора, и закрепленных на направляющей фланца 5 с возможностью относительной регулировки посредством болтов 6 двух кронштейнов 7, что позволяет производить настройку руки манипулятора на различные типоразмеры изделий 4. Кронштейны 7 выполнены в виде ползунов Г-образ- ной формы с упорами.
На каждом кронштейне 7 с помощью шарнира 8 установлена собачка, которая выполнена в виде одноплечего рычага, состоящего из кинематически связанных и образующих поступательную пару звеньев 9 и 10, из которых звено 9 служит направляющей, а звено 10 - ползуном. Фиксация положения звена 10 относительно звена 9 осуществляется болтом 11.
В нижней части звена 10 собачки (фиг. 1, 4 и 5) выполнен скос, который расположен со стороны захватной головки. Звено 9 собачки пружиной 12 (фиг. 1 и 4) поджато к поверхности упора кронштейна 7, которая расположена со стороны, противоположной установке захватной головки.
Механическая рука манипулятора работает следующим образом.
Схват 3 (фиг. 1) в исходном положении механической руки манипулятора захватывает изделие 4, и с распределительного устройства подается команда на выдвижение штока 1 привода возвратно-поступательного перемещения, который перемещает захватную головку 2 со схватом 3, изделием 4 и подающим средством, расположенным впереди схвата, в рабочую зону (по чертежу влево).
При перемещении захватной головки 2 звено 10 собачки (фиг. 4) взаимодействует с отштампованным изделием 13 и выгружает (выталкивает) его из рабочей зоны на лоток-склиз 14 (фиг.1), по которому
изделие 13 попадает в тару.
Доставленное в рабочую зону изделие 4 (фиг. 1-3) отпускается схватом 3 и падает в штамп 15, ориентируясь там посредством ловителей 16.
0 После отпускания изделия схватом 3 (фиг. 1) рука манипулятора выводится из рабочей зоны (по чертежу вправо), при этом звено 10 собачки своей скошенной частью воздействует на лежащее в штампе изделие и досылает его до упора 17, окончательно ориентируя в рабочей зоне. При дальнейшем перемещении руки манипулятора звено 10 собачки (фиг. 5), встречая сопротивление изделия 4, растягивает пружину 12 и, поворачивая собачку вокруг
д шарнира 8, приподнимается и скользит по поверхности изделия 4.
При возвращении руки манипулятора в исходное положение пружина 12 снова поджимает звено 9 собачки (фиг. 1 и 4,) к упору кронштейна 7, происходит обработ- ка изделия, и цикл повторяется.
Формула изобретения
1.Механическая рука манипулятора, содержащая привод ее возвратно-поступательного перемещения и захватную головку,- отличающаяся тем, что, с целью повыще- ния производительности путем совмещения операции загрузки и выгрузки изделия в рабочей зоне, она снабжена подающим средст5 вом, выполненным в виде фланца, закрепленного на торце руки манипулятора, двух кронштейнов с упорами, установленными на фланце, и собачками, шарнирно связанными с соответствующими кронщтейнами и подпружиненными относительно последних с возможностью взаимодействия с соответствующими упорами, при этом на каждой собачке со стороны захватной головки выполнен скос.
2.Механическая рука по п. 1, отли- 5 чающаяся тем, что, с целью расширения
технологических возможностей за счет обеспечения возможности работы с изделиями в широком диапазоне размеров, на фланце
подающего средства выполнена направляющая, на которой установлены кронщтейны с возможностью их относительного регулировочного перемещения, а собачки выполнены из двух кинематически связанных звеньев, образующих поступательную пару.
16 2 / 7
12 5
W 16 11
Фаг. г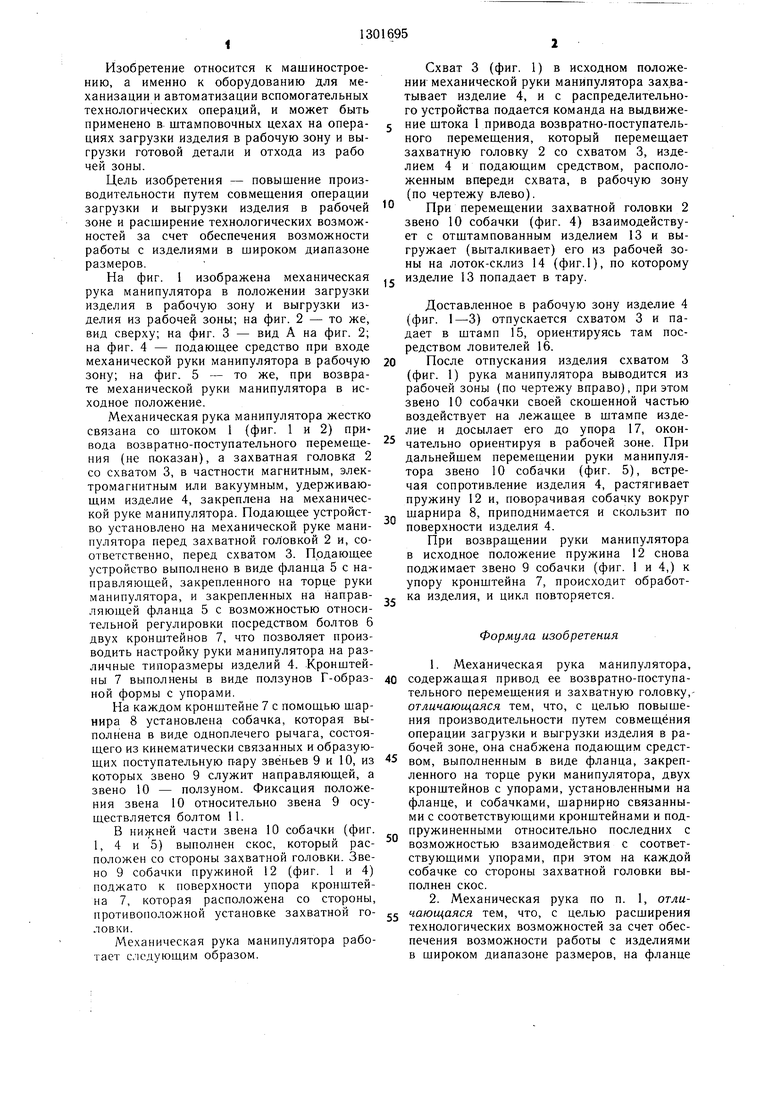
| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1698159A1 |
| Гибкий производственный модуль для листовой штамповки | 1988 |
|
SU1667994A1 |
| Переналаживаемый комплекс для штамповки | 1990 |
|
SU1801684A1 |
| РОБОТИЗИРОВАННЫЙ МАНИПУЛЯТОР | 2003 |
|
RU2243881C2 |
| КОЛЛАБОРАТИВНЫЙ РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ ПЕРЕМЕЩЕНИЯ ПРОДУКЦИИ ПОДВЕСНОГО РАЗМЕЩЕНИЯ | 2024 |
|
RU2841086C1 |
| Устройство для изготовления петель | 1986 |
|
SU1444041A1 |
| Робот к штамповочному прессу | 1982 |
|
SU1127674A1 |
| Манипулятор | 1983 |
|
SU1151450A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Манипулятор | 1982 |
|
SU1009754A1 |

Изобретение относится к области машиностроения, а именно к оборудованию для механизации и автоматизации вспомогательных технологических операций, и может быть применено в штамповочных цехах на операциях загрузки и выгрузки изделия в рабочей зоне. Целью изобретения является повышение производительности путем совмещения операций загрузки и выгрузки изделия в рабочей зоне и расширение технологических возможностей за счет обеспечения возможности работы с изделиями в широком диапазоне размеров. Механическая рука манипулятора жестко связана со штоком 1 привода возвратно-поступательного перемеш,ения, а при этом на ней закреплена захватная головка 2, подающее устройство установлено на торце механической руки манипулятора перед захватной головкой. Подающее устройство выполнено в виде фланца 5 с направляющей, на которой установлены два кронштейна 7 с упорами. На каждом кронштейне 7 шарнирно установлена собачка, поджатая к соответствующему упору кронштейна 7 пружиной 12. При перемещении механической руки манипулятора звено 10 собачки взаимодействует с отштампованной деталью и выгружает ее из рабочей зоны, при этом схват 3 отпускает изделие в рабочую зону. Затем рука манипулятора выводится из рабочей зоны, причем звено 10 собачки своей скошенной частью воздействует на лежащее в рабочей зоне изделие и досылает его до упора 17, окончательно ориентируя изделие в рабочей зоне. 1 з.п. ф-лы, 5 ил. с б (О 10 119 8 . 3 оо Oi 00 СП Vii2.i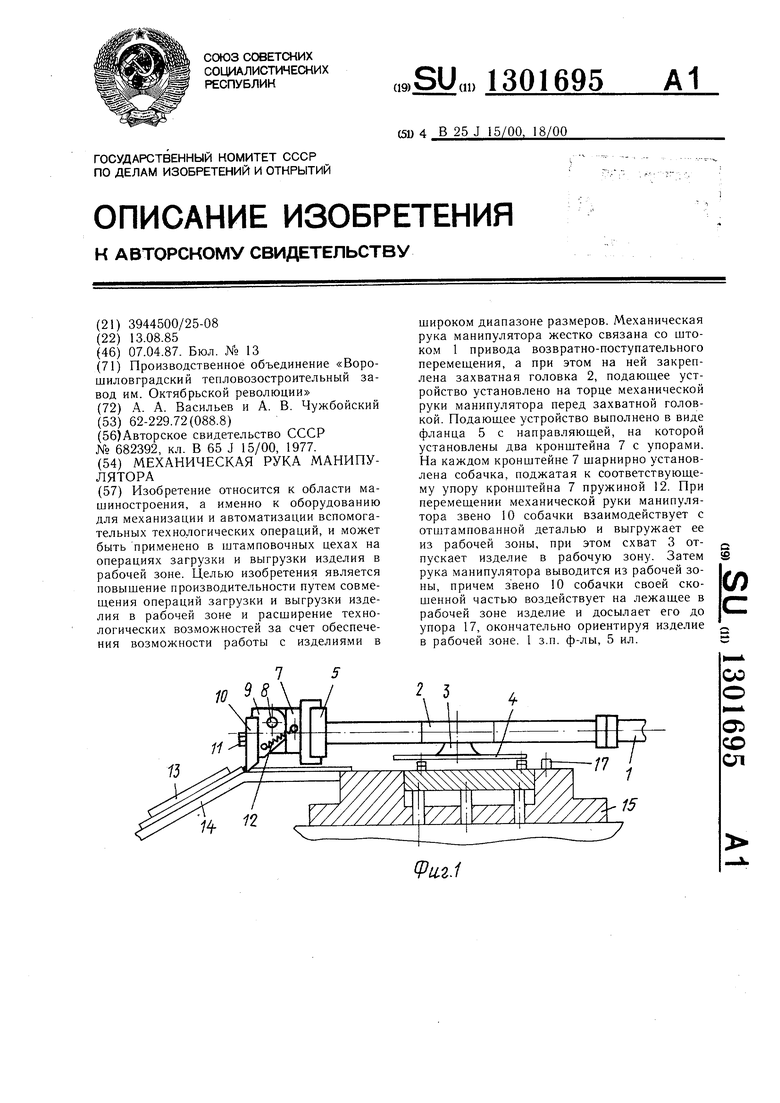
Вид А (повернуто)
16
7 6
11
Фиг.З
10
ФигЛ
Ю
12 8
Фиг..5
| Приспособление к манипулятору для захвата и удаления полых деталей | 1977 |
|
SU682392A2 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
