Изобретение относится к машиностроению, в частности к захватным устройствам прогФшшенных роботов.
Цель изобретения - повышение надежности захвата деталей.
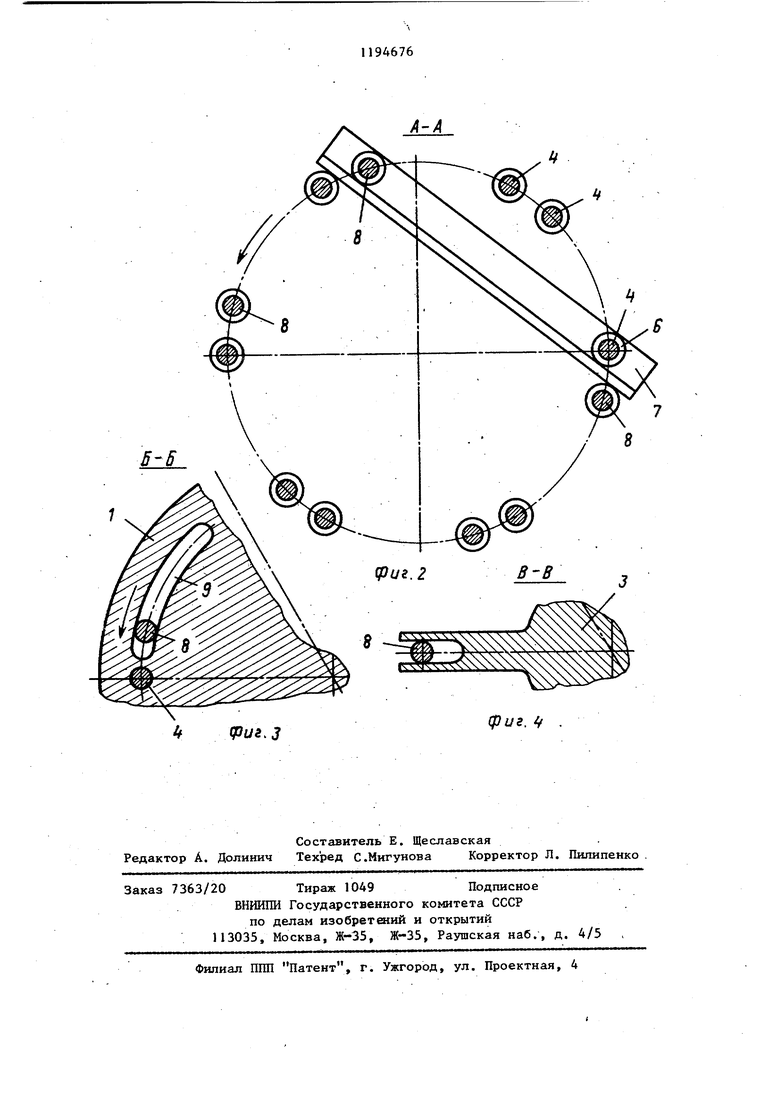
На фиг. 1 изображена конструкция зажимного устройства, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 1.
Захватное устройство состоит из корпуса 1 привода 2, жестко связанного с подвижным диском, по периметру которого расположены вилки 3. По свободной посадке в корпусе уста- нрвлены зажимные элементы, выполненные в виде пальцев 4, имеющих вдоль своей оси возвратно-поступательное перемещение, исходное положение которых обеспечивают пружинь 5. На кон цах пальцев устанавливаются сменные фасонные захватные губки 6. Последние своими рабочими поверхностями . соприкасаются с захватываемой деталью 7,.которая поджимается к ним за- хватными губками подвижных в плоскости захвата пальцев 8. Эти пальцы имеют ту же конструкцию, что и пальцы 4, но совершают сложное движение кроме возвратно-поступательного движения, как у пальцев 4, они перемещаются в плоскости захвата по траектории, которая задается пазами 9, фрезерованными в корпусе.
Устройство работает следукяцим образом.
При подводе захватного устройства к неориентированной детали 7, захват которой необходимо совершить, неподвижные 4 и подвижные 8 в плоскости захвата пальцы своими захватными фасонными губками 6 сомкнуты против направления стрелки на фиг. 2 и под действием пружин 5 находятся в исходном положении (не показано ) до поступления на привод 2 команды для захвата. Команда подается включением привода 2, с которым жестко соединен подвижный.относительно корпуса 1 диск с вилками 3, перемещающие пальцы 8 по пазам 9 в корпусе ( направление перемещения показано стрелкой на фиг. 2 и 3 ). Захват заканчивается зажатием детали 7 между неподвижных на пальцах 4 и подвижных на пальцах 8 в плоскости захвата фасонных зажимных губок 6. Если при подаче устройства в зону захвата одна или несколько зажимных губок наталкивается на неориентированную деталь 7, то движение их пальцев вдоль оси прекращается и длина их компенсируется пружиной 5. Освобождение детали производится включением привода в противоположном направлении (против стрелки на фиг. 2
Траектория движения сменных фасонных (по форме захватываемого тела 7) зажимных губок 6 может быть любая и задается конструктором в зависимости от формы захватываемой детали 7 и воз возможного ее положения, паза 9 в корпусе 1. fpus.3 Сриг. 4 .
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1983 |
|
SU1220788A1 |
| Захватное устройство | 1989 |
|
SU1708603A1 |
| Групповой схват промышленного робота | 1988 |
|
SU1535714A1 |
| Захватное устройство | 1987 |
|
SU1404433A1 |
| Захват манипулятора | 1986 |
|
SU1313701A1 |
| Схват робота | 1983 |
|
SU1117205A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Захватное устройство | 1985 |
|
SU1263525A1 |
ЗАХВАТНОЕ УСТРОЙСТВО, в корпусе которого размещены связанные с приводом и подпружиненные относительно корпуса зажимные элементы, выполненные в виде пальцев с расположенными на них губками, о т- личающееся тем, что, с целью повьшения надежности захвата деталей, в корпусе вьтолнены криволинейнЫе пазы, в которых размещены указанные пальцы, а привод их перемещения выполнен в виде диска, установленного в корпусе с возможностью поворота, при этом корпус снабжен дополнительными подпружиненными зажимными элементами,выполненными аналогично указанным и расположенными между ними. UD 4 Од «М Од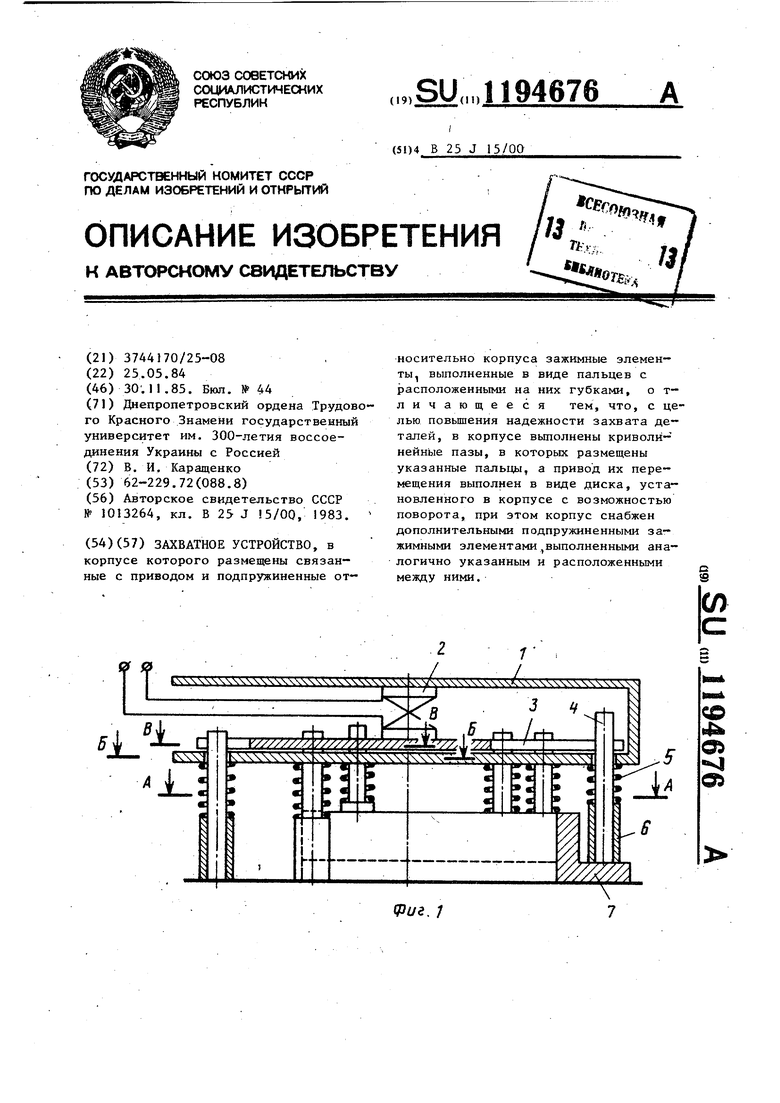
| Захватное устройство | 1982 |
|
SU1013264A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
