1
Изобретение относится к машиностроению, в частности к промышленным роботам и манипуляторам.
Цель изобретения - повышение производительности путем сокраш,ения технологического процесса.
На фиг. 1 схематически показан предлагаемый захват, общий вид; на фиг. 2 - разрез А-А на фиг. 1 (устройство ре13
Максимальный угол раскрытия захвата
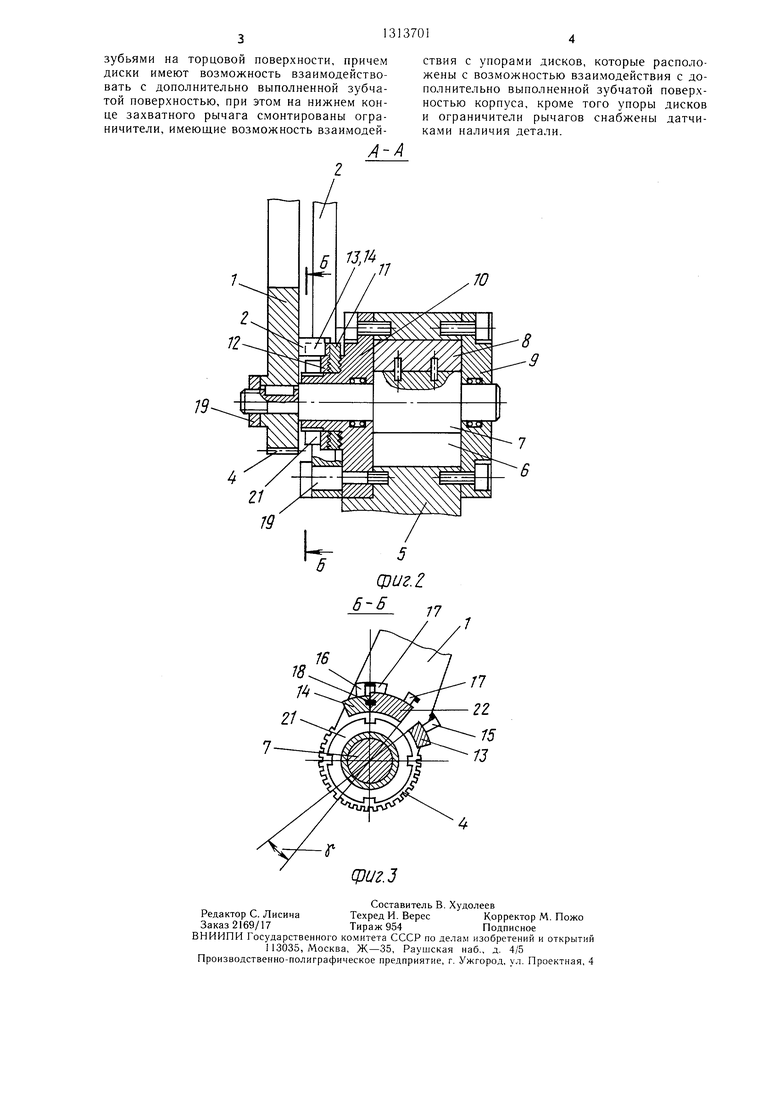
гулировки угла и диапазона раскрытия гу устанавливается поворотом диска 11 на ми- бок); на фиг. 3 - разрез Б-Б на фиг. 2„имальный угол так, чтобы при контакте
(установка датчиков срабатывания захватов) .
Захват манипулятора содержит рычаги 1,
ограничителя 22 в упор 13 деталь надежно освобождалась и срабатывали датчики 17 и 15. После установки дисков в необтяги 2, зажимные губки 3 и зубчатые 5 положение зажимается гайка 21 и
секторы 4. Приводное устройство захвата включает корпус 5 с сектором 6 и осью 7, сектор 8 и крышки 9 и 10. Привод снабжен устройством регу.тировки угла раскрытия губок, который содержит регулировочманипулятор включается в работу в автома- тическо.м режиме. Через канал 23 в полость ротора подается под давлением рабочее тело, которое действует на сектор 8, при этом поворачиваются ось 7 и рычаг 1, закрепные диски 11 и 12 с упорами 13 и 14 и 20 ленный на этой оси, по часовой стрелке, датчики 15-18. Крышки 9 и 10 роторатак как зубчатые секторы соединены между
собой, второй рычаг поворачивается против
часовой стрелки и зажимные губки 3 расходятся. Ось 7 и рычаг 1 поворачиваются до тех пор, пока ограничитель 22 рычага не упирается в упор 13. При этом срабатывают датчики 17, 15 и дают сигнал о возможности перемешения захватных губок к детали или детали к захвату (в зависимости от выбранного технологического
закреплены жестко на корпусе 5. В крышках ротора установлена с возможностью враше- ния ось 7, на которой при помош,и штифтов жестко закреплен сектор 8. Сектор 6 25 жестко закреплен на корпусе 5. На выходном конце оси жестко при помош,и шпонки установлен и поджат гайкой 19 один из рычагов захватного устройства. Второй рычаг захвата закреплен с воз.можностью вращения на корпусе 5. Зубчатые секторы зо ). После того, как деталь оказы- 4 выполнены за одно целое с рычагамивается в зоне губок захвата, подается сиги соединены между собой. Вторые концынал в систему управления. Губки сходятся
рычагов соединены с зажимными губкамиД тех пор, пока не зажимают деталь,
шарнирно. Тяги 2 соединены шарнирно од-После захвата детали срабатывают датчиним концом с корпусом 5 при помощи 16, 17 и дают сигнал на выполнение
осей 20, другим концом соединены шарнир- 35 следующего движения манипулятора. Отпус- но с зажимными губками. Оси шарнирногокакие детали производится изменением давления в полостях ротора. Далее цикл повторяется.
Если при зажатии детали ограничитель 22 упирается в ограничитель 14, то срабатысоединения каждого рычага и соответствующей тяги с корпусом и зажимной губкой расположены так, что линии их соединения составляют параллелограмм. Благодаря этотаются параллельными одна другой.
му при любом положении захвата губки ос- 40 вает датчик 18 наличия детали в захвате.
Это означает, что на позиции детали не имеется или деталь имеет размер, меньший допустимого (деталь бракованная). В этом случае работа останавливается и принимаются необходимые меры для запуска оборудования в работу.
Формула изобретения Захват манипулятора, содержащий захватные рычаги, щарнирно закрепленные в корпусе посредством осей и взаимосвязан45
На крышке 10 установлены регулировочные диски 11 и 12, которые поджимаются к ней гайкой 21. На торцах крышки и дисков нарезан «мышиный зуб, что дает возможность поворачивать диски относительно один другого и , а соответственно, и корпуса 5 при отжатой гайке 21. При зажатии гайки диски становятся неподвижными относительно один другого и корпуса 5. 50 6 между собой посредством выполненных На диске 11 жестко установлен упор 13,на захватных рычагах зубчатых сегментов,
на диске 12 жестко установлен упор 14. На рычаге 1, который установлен на оси 7, имеется ограничитель 22. Ограничитель хода и упор расположены так, что при повороте
рычага в ту или другую сторону огра- 55 бок, выполненных в виде смонтированных на ничитель хода упирается в упор. На упореодной оси регулировочных дисков с возможностью перестановки друг относительно друга с упорами на боковой поверхности и
причем один из этих сегментов связан с приводо.м, отличающийся тем, что, с целью повышения производительности, он снабжен устройством регулировки угла раскрытия гуи ограничителе неподвижно установлены датчики 15-18.
1313701
Захват работает следуюш,им образом.
Перед началом работы производится установка угла раскрытия губок в соответствии с типоразмером детали. Минимальный угол устанавливается поворотом диска 12 (гайка 21 опуш,ена) в такое положение, чтобы при зажатой детали срабатывали датчики 17 и 16, а ограничитель и упор немного не доходили один до другого.
Максимальный угол раскрытия захвата
устанавливается поворотом диска 11 на ми- „имальный угол так, чтобы при контакте
ограничителя 22 в упор 13 деталь надежно освобождалась и срабатывали датчики 17 и 15. После установки дисков в необ оД ое положение зажимается гайка 21 и
манипулятор включается в работу в автома- тическо.м режиме. Через канал 23 в полость ротора подается под давлением рабочее тело, которое действует на сектор 8, при этом поворачиваются ось 7 и рычаг 1, закрепчасовой стрелки и зажимные губки 3 расходятся. Ось 7 и рычаг 1 поворачиваются до тех пор, пока ограничитель 22 рычага не упирается в упор 13. При этом срабатывают датчики 17, 15 и дают сигнал о возможности перемешения захватных губок к детали или детали к захвату (в зависимости от выбранного технологического
). После того, как деталь оказы- вается в зоне губок захвата, подается сигбок, выполненных в виде смонтированных на одной оси регулировочных дисков с возможпричем один из этих сегментов связан с приводо.м, отличающийся тем, что, с целью повышения производительности, он снабжен устройством регулировки угла раскрытия гузубьями на торцовой поверхности, причем диски имеют возможность взаимодействовать с дополнительно выполненной зубчатой поверхностью, при этом на нижнем конце захватного рычага смонтированы ограничители, имеющие возможность взаимодействия с упорами дисков, которые расположены с возможностью взаимодействия с дополнительно выполненной зубчатой поверхностью корпуса, кроме того упоры дисков и ограничители рычагов снабжены датчиками наличия детали.
75
фиг.З
Составитель В. Худолеев
Редактор С. ЛисинаТехред И. ВересКорректор М. Пожо
Заказ 2169/17Тираж 954Подписное
ВНИИПИ Государственного комитета СССР по делам изобретений и открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4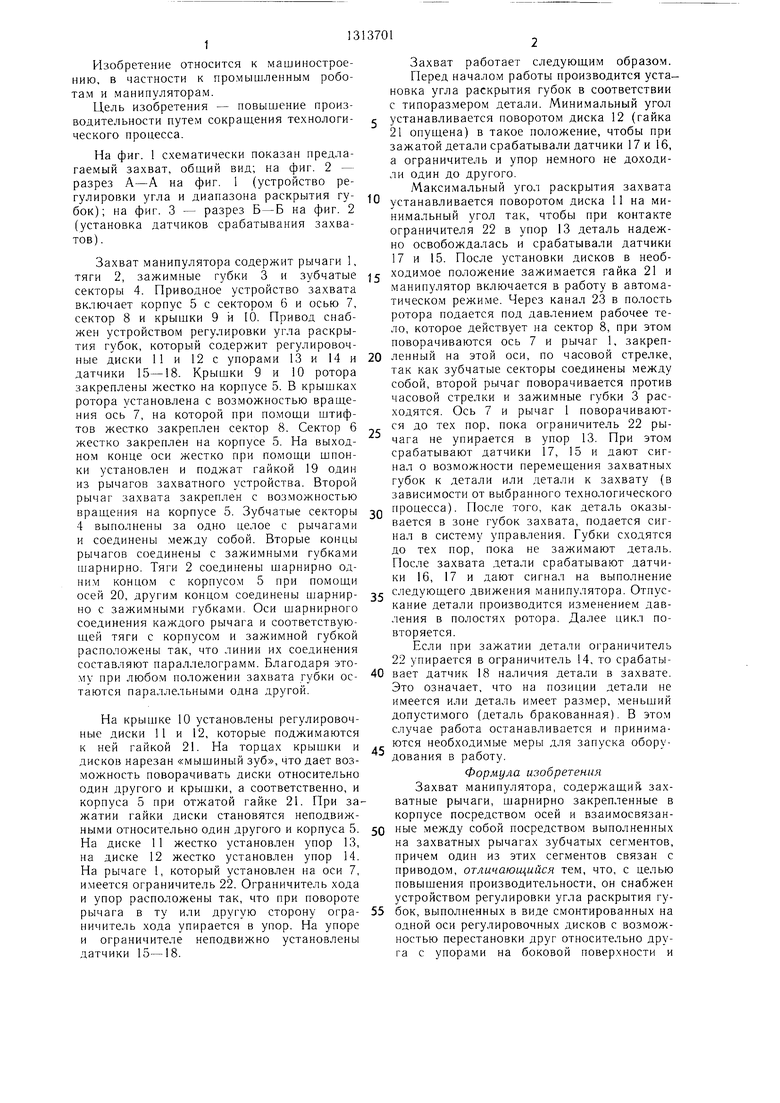
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота длябОбиН C пРяжЕй | 1979 |
|
SU806406A1 |
| Схват манипулятора | 1986 |
|
SU1445951A1 |
| Захватное устройство | 1986 |
|
SU1579773A1 |
| Захватное устройство | 1984 |
|
SU1227465A1 |
| ЗАХВАТНОЕ УСТРОЙСТВО | 1989 |
|
RU2044620C1 |
| Схват манипулятора | 1981 |
|
SU965655A1 |
| Захват | 1980 |
|
SU905061A1 |
| Загрузочно-разгрузочное устройство | 1983 |
|
SU1115883A1 |
| Захват манипулятора | 1979 |
|
SU837855A1 |
| Захват манипулятора | 1984 |
|
SU1333573A1 |
Изобретение относится к машиностроению и может быть использовано в манипуляторах промышленных роботов. Цель изобретения - повышение производительности за счет сокращения технологического процесса. Захват содержит рычаги 1, тяги 2 зажимные губки и зубчатые секторы 4, приводное устройство. Регулировка привода осу- ш,ествляется за счет узла регулировки угла раскрытия губок, который содержит регулировочные диски с упорами и датчики наличия детали. 3 ил. (Л со со о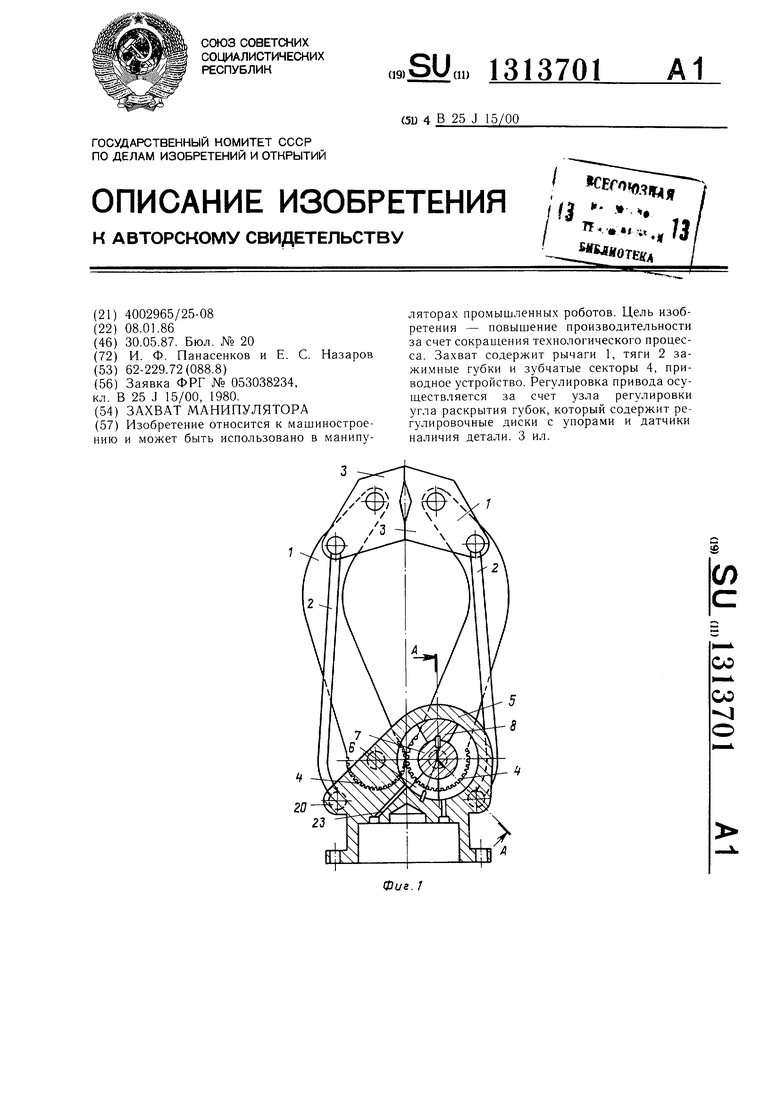
| Заявка ФРГ № 053038234, кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
