,L
(Л
N
О
4
4
СО СО
Изобретение относится к захватным устройствам, в частности к захватным головкам манипуляторов, предназначенных для подъемно-транспортных работ с партиями деталей одинакового размера, ориентированных под захватной головкой в двух взаимно перпендикулярных направлениях.
Цель изобретения - расширение технологических возможностей путем обеспечения захвата деталей, сориентированных в одном из двух взаимно перпендикулярных направлений.
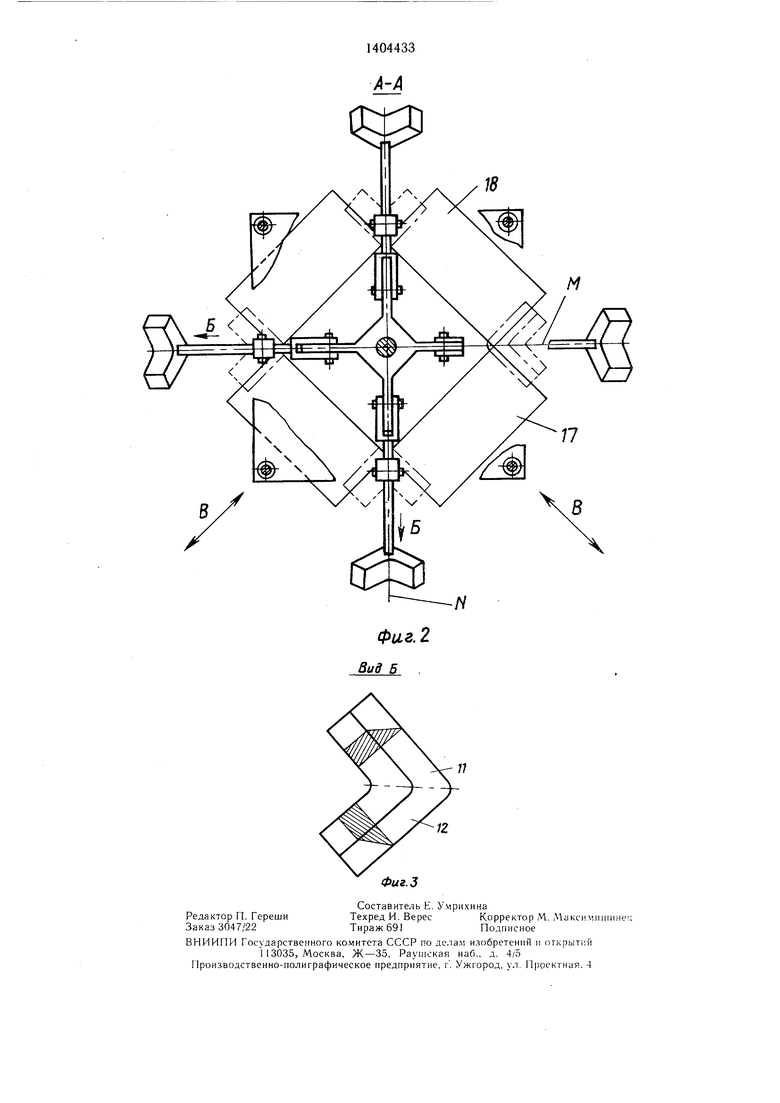
На фиг. 1 изображено устройство в трех положениях, общий вид (I - с разжатыми захватными элементами (сплошные толстые основные линии); II - со сжатыми захватными элементами (штрих-пунктирные линии) т - с поднятой деталью (штрих-пунктирные линии с двумя точками)); на фиг. 2 - разрез А-А на фиг. 1 (стрелками В показаны направления подачи деталей); на фиг. 3 - вид Б на фиг. 2.
Устройство состоит из корпуса 1, на котором шарнирно на осях 2 установлены захватные элементы 3, выполненные в виде двуплечих рычагов 4, одно плечо каждого из которых снабжено губкой 5, а другое посредством пальца 6 связано с ползуном, имеюшим приводной вертикальный шток 7 привода 8 линейных перемещений и жестко закрепленную на его нижнем конце в горизонтальной плоскости плиту 9, в которой выполнены горизонтальные перпендикулярные осям 2 поворота пазы 10, в каждом из которых размещен палец 6 соответствующего рычага 4.
Захватные элементы 3 закреплены на корпусе 1 попарно напротив друг друга в двух вертикальных взаимно перпендикулярных плоскостях М N, каждая губка 5 захватных элементов 3 выполнена с двумя рабочими поверхностями 11 и 12, симметричными относительно плоскостей М к N. Для применения устройства в качестве захватной головки манипулятора привод 8 линейного перемещения смонтирован на станине 13, выполненной с направляющими колонками 14, по которым может перемещаться корпус 1, причем нижнее положение корпуса 1 по отношению к станине 13 ограничивается упорами 15 и удерживается в нем амортизирую- ,ими компенсаторами 16.
Зазор между нижним габаритом схвата в положении I и верхней поверхностью захватываемой детали имеет величину /г.
В исходном положении (положение 1, фиг. 1) шток 7 привода 8 линейного перемещения выдвинут в крайнее положение.
при этом плита 9, соединенная со щтоком 7, находится в крайнем нижнем положении, а губки 5 захватных элементов 3 разжаты и подняты над захватываемой деталью 17 - или 18 на высоту h.
Устройство работает следующим образом.
При включении привода 8 линейного перемещения шток 7, перемещаясь вверх, увлекает за собой и соединенную с ним пли0 ту 9, при этом пальцы 6 рычагов 4, двигаясь в пазах 10 плиты 9, поворачивают двуплечие рычаги 4 вокруг осей 2, закрепленных в корпусе 1, а губки 5 захватных элементов 3 зажимают захватываемую деталь 17 или 18
с (положение II, фиг. 1).
При дальнейшем движении штока 7 вверх корпус, преодолевая сопротивление амортизирующих компенсаторов 16, поднимается вверх с зажатой деталью 17 или 18 (положение III, фиг. 1).
0 После оттранспортировки детали 17 или 18 к месту штабелирования привод 8 линейного перемещения реверсируется, при этом шток 7 перемещается вниз, амортизирующие компенсаторы 16 возвращают корпус 1 в нижнее положение, пальцы 6, двигаясь в пазах 10 опускающейся плиты 9, поворачивают двуплечие рычаги 4 вокруг осей 2, разжимая губки 5 захватных элементов 3 и освобождая деталь 17 или 18. Цикл закончен.
По возвращении устройства на исходную
Q позицию цикл повторяется.
Формула изобретения
Захватное устройство, содержащее корпус с шарнирно закрепленными на нем за5 хватными двуплечими рычагами с зажимными губками на одних плечах и пальцами на других и ползун, имеющий приводной вертикальный шток и жестко закр епленную на нем снизу горизонтальную плиту с горизонтальными пазами для пальцев рычагов,
0 отличающееся тем, что, с целью расширения технологических возможностей путем обеспечения захвата деталей, сориентированных в одном из двух взаимно перпендикулярных направлений, оно снабжено закрепленным
с на корпусе дополнительным захватным рычагом, при этом основные и дополнительный захватные рычаги расположены во взаимно перпендикулярных плоскостях, а каждая из губок захватных рычагов выполнена с двумя рабочими поверхностями, симметрич0 ными относительно упомянутых выше плоскостей.
iz
Фиг.З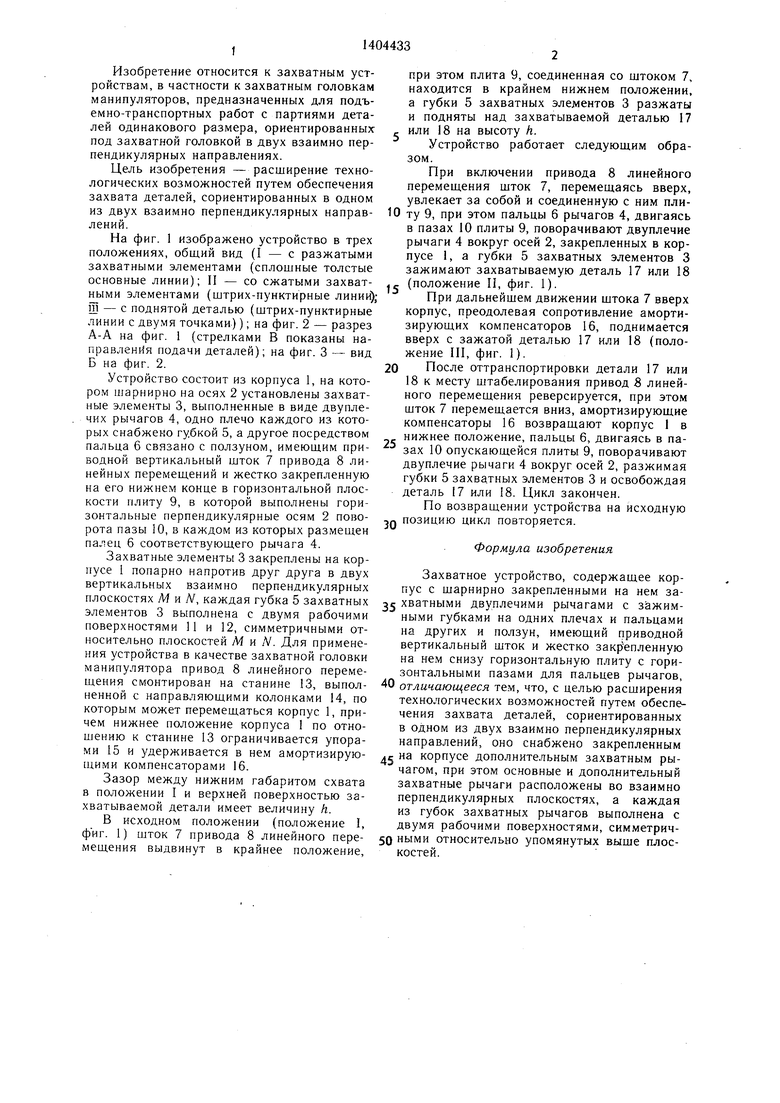
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Автоматическая линия для изготовления деталей типа топоров | 1989 |
|
SU1727945A1 |
| Захват манипулятора | 1979 |
|
SU812567A1 |
| Грузозахватное устройство | 1990 |
|
SU1736899A1 |
| Многооперационный станок с ЧПУ | 1985 |
|
SU1305000A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Устройство для перемещения деталей с рабочей позиции пресса | 1981 |
|
SU967632A1 |
| Устройство для совмещения деталей | 1979 |
|
SU845305A1 |
| Устройство для формования изделий "мюзле | 1977 |
|
SU751485A1 |
| Установка для микросварки проволочных проводников | 2021 |
|
RU2759103C1 |
Изобретение относится к захватным устройствам,в частности к захватным головкам манипуляторов, предназначенным для подъемно-транспортных работ с партиями деталей одинакового размера, ориентированных под захватной головкой в двух взим- но перпендикулярных направлениях. Цель изобретения - расширение технологических возможностей путем обеспечения захвата деталей, сориентированных в одном из двух взаимно перпендикулярных направлений. Для этого захватные элементы установлены попарно навстречу друг другу в двух взаимно перпендикулярных плоскостях и снабжены захватными губками 5, выполненными с двумя рабочими поверхностями, симметричными относительно плоскостей поворота захватных элементов. Для исключения привода вертикальных перемещений корпус 1 устройства установлен с возможностью вертикального перемещения по направляющим, закрепленным на станине 13, а между корпусом 1 и станиной 13 помещены амортизирующие компенсаторы 3 ил. с (О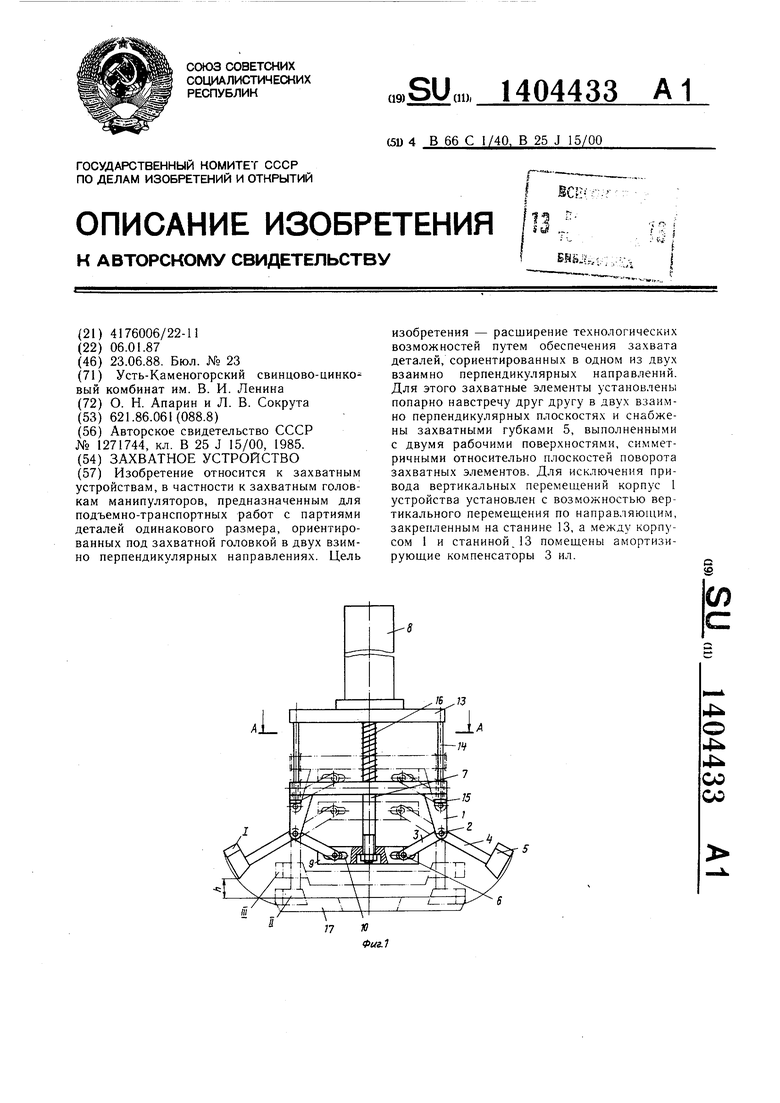
| Захват | 1985 |
|
SU1271744A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
